") EtherCAT科普系列(4):EtherCAT技術(shù)在人形機(jī)器人靈巧手領(lǐng)域應(yīng)用
EtherCAT科普系列(4):EtherCAT技術(shù)在人形機(jī)器人靈巧手領(lǐng)域應(yīng)用

人形機(jī)器人又稱仿生機(jī)器人,是一種模仿人類外形的機(jī)器人,除具備人形和模擬人類動作外還兼具智慧化和可交互性等特點。人形機(jī)器人的核心技術(shù)模塊包括環(huán)境感知模塊、運動控制模塊和人機(jī)交互模塊。
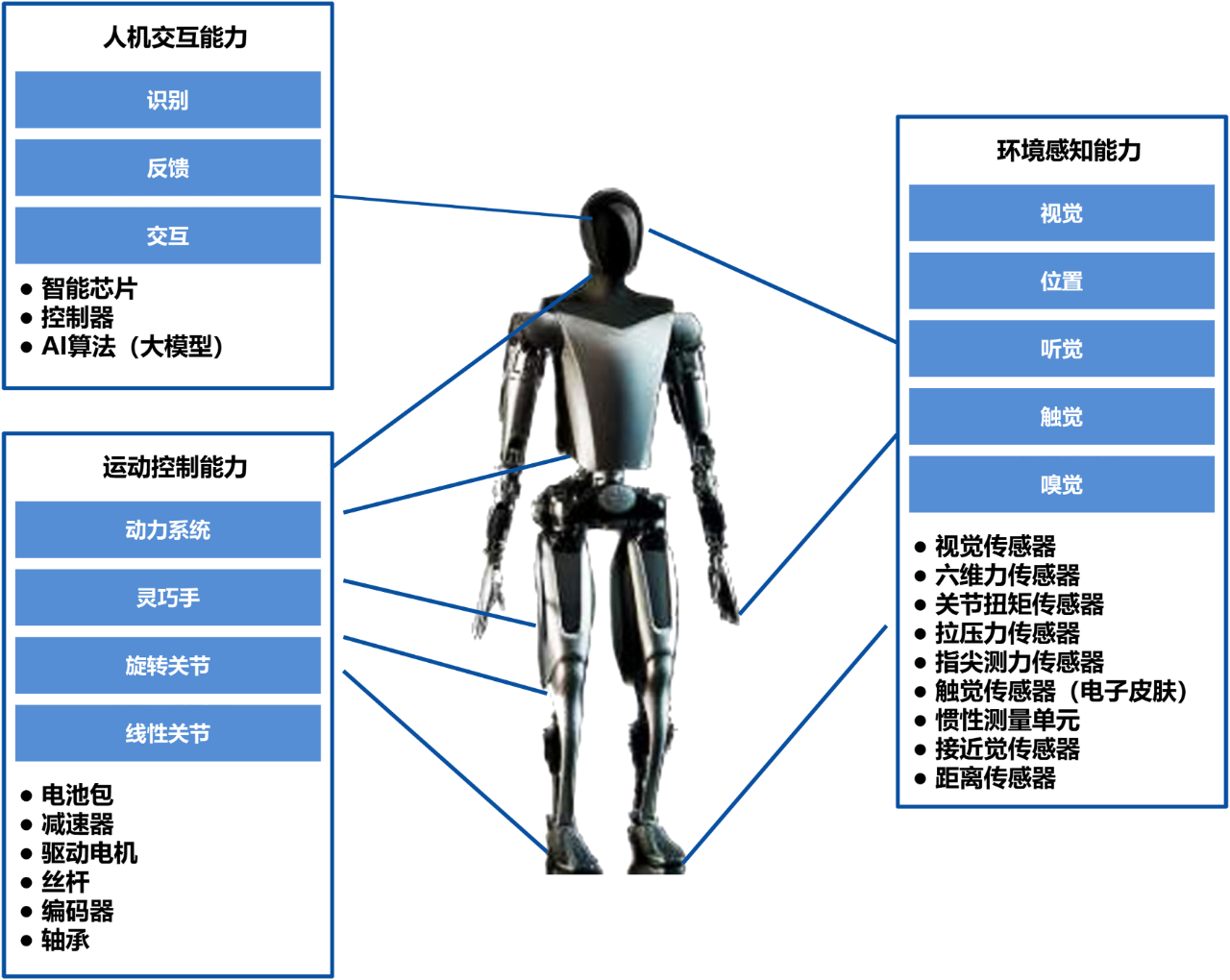
▲人形機(jī)器人核心模塊相比專門為單一任務(wù)設(shè)計的機(jī)器人,人形機(jī)器人可以在不同場景之間快速切換,具有高度的通用性和靈活性,能夠執(zhí)行多種不同類型的任務(wù),具有更廣闊的商業(yè)應(yīng)用前景。此外,相較于其他形態(tài)的機(jī)器人,人形機(jī)器人能夠更好地適應(yīng)按照人類的身體特征和操作習(xí)慣來設(shè)計的各類基礎(chǔ)設(shè)施,無需對現(xiàn)有的環(huán)境和設(shè)施進(jìn)行大規(guī)模改造。
目前人形機(jī)器人正處于商業(yè)化爆發(fā)期前夜,普遍認(rèn)為到2030年市場規(guī)模可達(dá)數(shù)百億美元。Markets and Markets預(yù)計全球人形機(jī)器人市場規(guī)模將由2023年的18億美元提升至2028年的138億美元,年復(fù)合增速約50.2%。據(jù)高盛預(yù)測,樂觀情況下2035年市場規(guī)模可能達(dá)到1540億美元,相當(dāng)于2021年電動汽車市場規(guī)模或手機(jī)市場規(guī)模的1/3。2024年4月首屆中國人形機(jī)器人產(chǎn)業(yè)大會上發(fā)布的《人形機(jī)器人產(chǎn)業(yè)研究報告》預(yù)測,2024年中國人形機(jī)器人市場規(guī)模將達(dá)約27.6億元,2026年達(dá)到104.71億元,2029年達(dá)到750億元,將占世界總量的32.7%,比例居世界第一,到2035年有望達(dá)到3000億元規(guī)模。
1靈巧手:人形機(jī)器人交互核心部件
人類靈巧的手是生活中必不可缺的部分,不但能夠以不同的姿態(tài)抓取各式各樣的物體,而且能夠通過精確的操作實現(xiàn)特定的、復(fù)雜的任務(wù)。同樣,機(jī)器人靈巧手也是機(jī)器人設(shè)計與操作的重要組成部分,是實現(xiàn)機(jī)器人局部精細(xì)操作的重要途徑。
靈巧手是人形機(jī)器人重要的末端執(zhí)行器。未端執(zhí)行器直接安裝在機(jī)器人手腕上,用于夾持工件、或讓工具按照規(guī)定的程序完成的工作的機(jī)構(gòu)。相較于普通工業(yè)機(jī)械手(自由度少、結(jié)構(gòu)簡單、易于控制),類人化設(shè)計的靈巧手對控制精度、靈活性要求極高。靈巧手是模擬人類手部功能的高自由度機(jī)械裝置,具備抓取、操作、感知等能力,是人形機(jī)器人實現(xiàn)精細(xì)交互的核心執(zhí)行器。
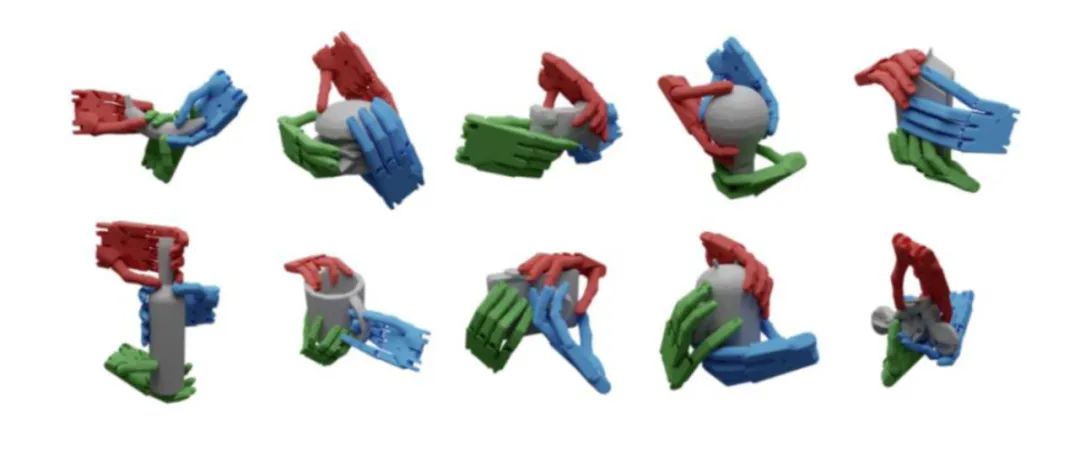
▲靈巧手部分抓取場景(來源:EPIC)
靈巧手的性能和成本受其三大核心組件---驅(qū)動系統(tǒng)、傳動系統(tǒng)和傳感裝置的共同影響。驅(qū)動系統(tǒng)(各類電機(jī))提供動力來源,驅(qū)動手指關(guān)節(jié)運動;傳動系統(tǒng)(齒輪、連桿、腱繩等)將驅(qū)動系統(tǒng)的動力高效傳遞到手指關(guān)節(jié),并調(diào)節(jié)輸出的力、速度和行程;傳感系統(tǒng)(各類傳感器)實時監(jiān)測手指狀態(tài)(位置、力、觸覺等),反饋給控制系統(tǒng)以實現(xiàn)閉環(huán)調(diào)節(jié)。
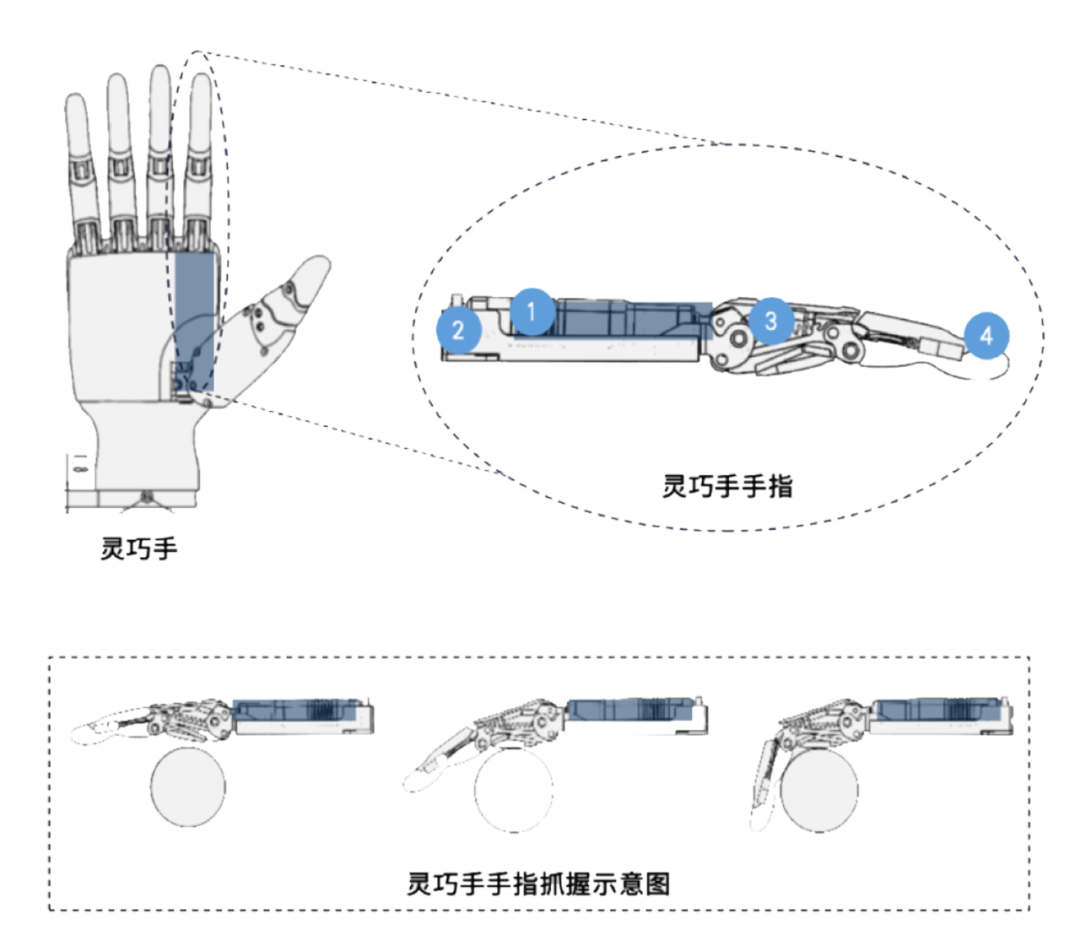
▲靈巧手手指結(jié)構(gòu)示意圖(來源:因時機(jī)器人)
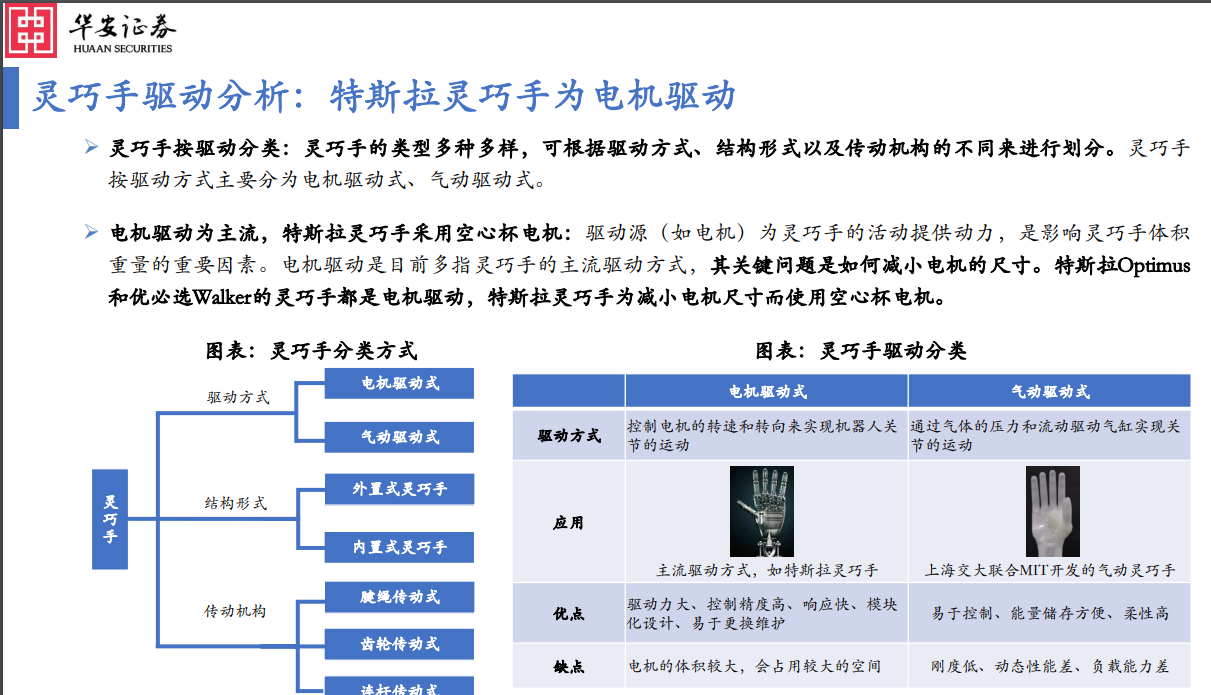
根據(jù)驅(qū)動系統(tǒng)可分為液壓驅(qū)動、電機(jī)驅(qū)動、氣壓驅(qū)動、形狀記憶合金驅(qū)動四類。電機(jī)驅(qū)動是目前多指靈巧手的主要驅(qū)動方式。電機(jī)驅(qū)動具有驅(qū)動力大,控制精度高、響應(yīng)快、模塊化設(shè)計、易于更換維護(hù)等優(yōu)點。特斯拉optimus、優(yōu)必選人形機(jī)器人靈巧手等都選擇了電機(jī)驅(qū)動方式。
靈巧手目前主要應(yīng)用在航空航天、醫(yī)療、智能制造等領(lǐng)域。如執(zhí)行航天飛行器的艙外任務(wù)、仿生假肢和遠(yuǎn)程手術(shù)、拼裝流水線上小尺寸零件等。隨著近年來人形機(jī)器人技術(shù)的突飛猛進(jìn),人形機(jī)器人用靈巧手有望成為靈巧手未來的主流應(yīng)用領(lǐng)域。根據(jù)Statista預(yù)測,全球機(jī)器人靈巧手2021年市場規(guī)模約為11.6億美元。隨著工業(yè)自動化、航空航天、醫(yī)療保健等行業(yè)對靈巧手需求的不斷增加與技術(shù)進(jìn)步對靈巧手的降本效應(yīng),靈巧手市場規(guī)模有望不斷增加。根據(jù)Statista的預(yù)測數(shù)據(jù),全球機(jī)器人靈巧手市場規(guī)模將由2021年的11.6億美元增長至2030年的30.35 億美元,2022-2030年間CAGR為10.9%。同時,全球機(jī)器人靈巧手市場容量將由2021年的50.75萬只增長到2030年的141.21 萬只,2022-2030 年間CAGR為11.7%。
2靈巧手的主要通信類型
機(jī)器人靈巧手是多自由度、多傳感器,且需要快速、實時通訊的機(jī)器人控制系統(tǒng),具有穩(wěn)定、可靠、高速與實時通訊的機(jī)器人靈巧手是保證其實現(xiàn)在線操作的關(guān)鍵因素。目前全球典型的靈巧手常用的兩類通訊方式,一類是基于國際通用通訊協(xié)議開發(fā)的靈巧手,比如串口通訊、USB接口通訊、CAN總線通訊、Ethernet通訊和 EtherCAT通訊等;另一類則是由用戶自定義通訊協(xié)議的靈巧手,比如PPSeCo等。靈巧手的通訊設(shè)計主要考慮如下4個問題:通訊的速度、通訊的距離、通訊的節(jié)點數(shù)、能否易于實現(xiàn)復(fù)雜的靈巧手控制算法。通訊速度即是靈巧手實際需要的通訊傳輸速度,通訊的距離般指主控端到靈巧手的連線距離,節(jié)點數(shù)是指一個主控端可以控制靈巧手的個數(shù)。而對于第4點源于靈巧手不僅要保證高速、穩(wěn)定、可靠的通訊,而且由于靈巧手控制算法的復(fù)雜性,更應(yīng)當(dāng)基于通訊協(xié)議設(shè)計出便于實現(xiàn)復(fù)雜控制算法的控制平臺,從而將靈巧手的控制器算法應(yīng)用到具體的操作中。
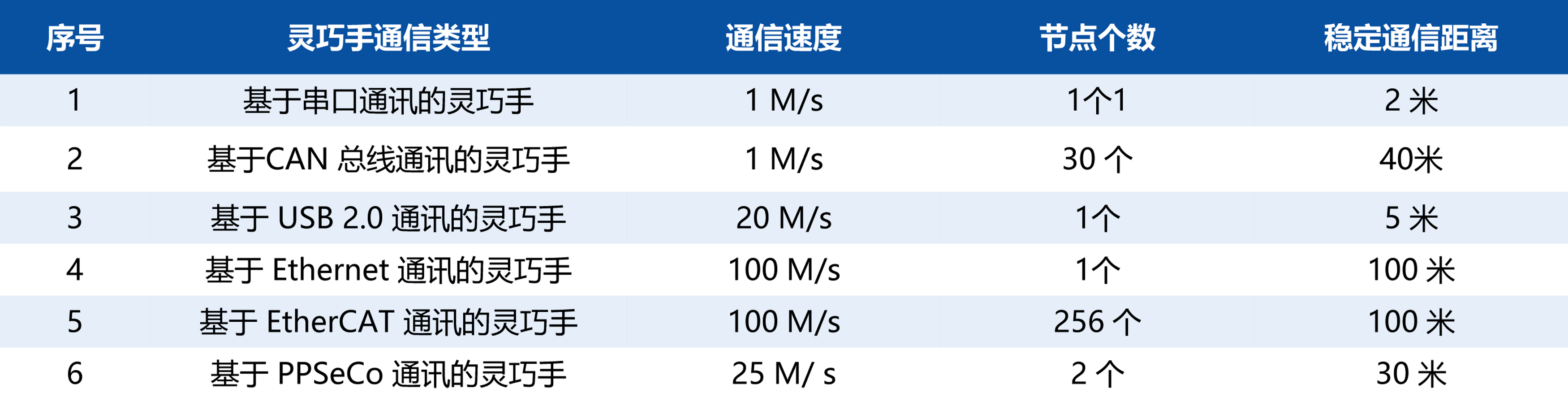
▲靈巧手通訊總線比較從對比表可以看出,EtherCAT 總線是目前最適合人形機(jī)器人靈巧手的實時以太網(wǎng)通訊總線,基于EtherCAT的靈巧手可以達(dá)到設(shè)計的期望性能指標(biāo)。
3基于 EtherCAT 設(shè)計的靈巧手系統(tǒng)
典型EtherCAT實時通訊的靈巧手手掌板電路主要包括微處理器、EtherCAT 從站通信模塊、手指通訊電路模塊、處理器擴(kuò)展內(nèi)存模塊以及電源轉(zhuǎn)換模塊等。微處理器電路模塊是靈巧手手掌板總的處理器單元;EtherCAT從站通信電路模塊用于實現(xiàn)EtherCAT協(xié)議必須的硬件電路模塊;手指電路模塊是靈巧手手指通訊自定義單元;電壓轉(zhuǎn)換電路模塊將 PCB 輸入的電壓轉(zhuǎn)換成 3.3V、2.5V或1.2V等電壓,對整板 PCB 供電;擴(kuò)展內(nèi)存SRAM,針對 EtherCAT 協(xié)議對大內(nèi)存的需求,進(jìn)行微處理器內(nèi)存擴(kuò)展。
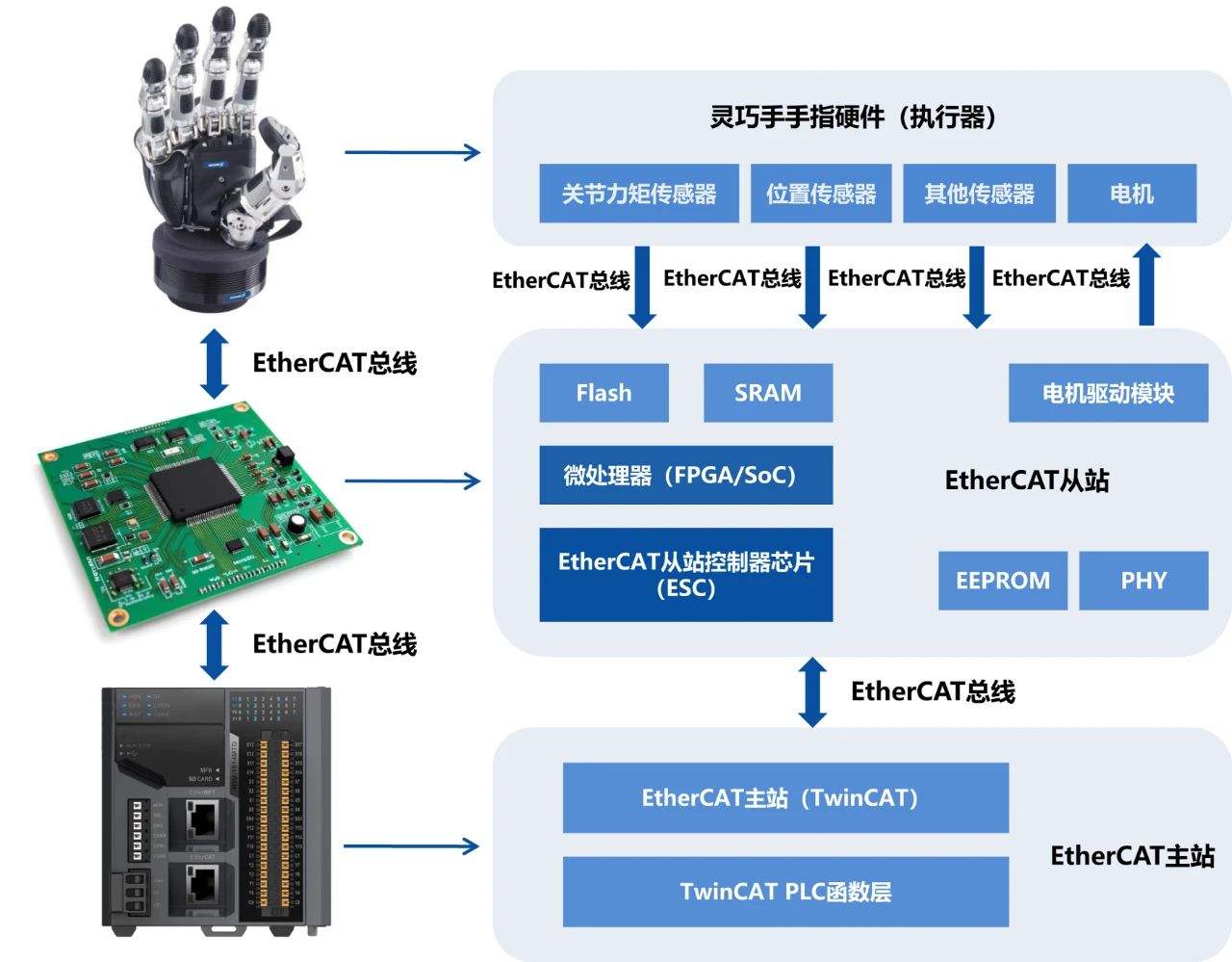
▲基于EtherCAT 的人形機(jī)器人靈巧手系統(tǒng)整體結(jié)構(gòu)
4靈巧手手掌板 EtherCAT 從站系統(tǒng)
靈巧手手掌板 EtherCAT 從站系統(tǒng)主要包括微處理器、外部存儲器、Flash、手指控制器和EtherCAT從站通信模塊組成。1)微處理器是靈巧手EtherCAT 從站設(shè)計的核心,也是從站設(shè)計的難點。處理器的作用是對EtherCAT從站芯片控制和通訊,處理手指發(fā)來的信息,尤其需要實時地進(jìn)行 EtherCAT 協(xié)議層的處理。
2)外部存儲器,由于 EtherCAT 協(xié)議層需要占用大量的內(nèi)存,僅憑借控制器片內(nèi)部的RAM,會造成內(nèi)存空間不足的狀態(tài),因此需要外部擴(kuò)展存儲器。
3)Flash用來存儲控制器的配置信息,保證掉電后不會丟失程序,上電時程序可以自動加載到 微處理器中。
4)手指控制器(電機(jī)驅(qū)動模塊)能夠使靈巧手手指得到實時控制,并實時接收手指的反饋信息。
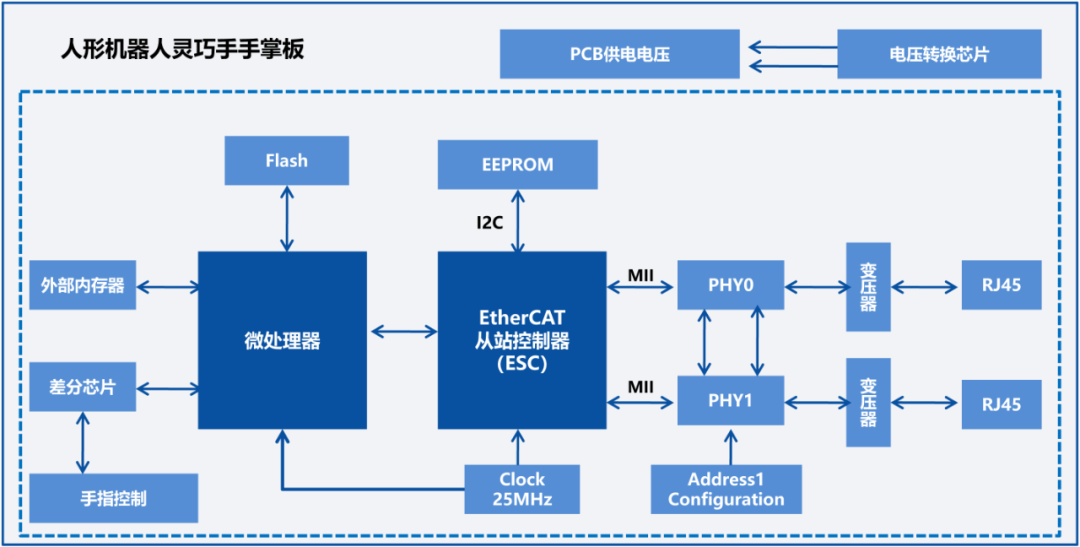
▲基于 EtherCAT 的靈巧手從站系統(tǒng)結(jié)構(gòu)EtherCAT從站通信模塊包括EtherCAT從站控制器芯片(ESC)、時鐘單元、EEPROM以及以太網(wǎng)芯片和變壓器等輔助電路單元,其中ESC是從站設(shè)計的核心。
1)ESC從站芯片負(fù)責(zé)與處理器通訊,實時的讀取用戶層和由EtherCAT主站傳輸來的數(shù)據(jù)。
2)時鐘單元,對從站芯片和處理器提供工作必備的時鐘。
3)EEPROM存儲靈巧手從站的通訊配置信息。由于ESC從站芯片需要對工作方式配置,比如 PDI的工作方式配置、通訊的地址配置,以及傳輸時用到的數(shù)據(jù)結(jié)構(gòu)配置等,這些靈巧手實際應(yīng)用需要的具體的EtherCAT從站通訊方式,都是憑借配置XML文件來實現(xiàn),而對應(yīng)的靈巧手EtherCAT 工作方式的描述文件,將會在 EEPROM 中保存。
4)以太網(wǎng)芯片PHY保證從站工作需要的以太網(wǎng)物理層的接口需求。
5)變壓器保證以太網(wǎng)芯片滿足 IEEE802.3和 ANSIX3.263 標(biāo)準(zhǔn)的需求。
5碼靈半導(dǎo)體靈巧手 EtherCAT系統(tǒng)解決方案
碼靈半導(dǎo)體推出的CF110x系列EtherCAT從站控制器芯片可應(yīng)用于靈巧手手掌板 EtherCAT 從站系統(tǒng),用于實現(xiàn)實時性好、通訊速度快,同時又能夠易于復(fù)雜算法實現(xiàn)的控制平臺。CF110x系列最多可以提供3個數(shù)據(jù)收發(fā)端口,支持 100 Mbit/s的全雙工通信,使從站能夠靈活的實現(xiàn)各種拓?fù)浣Y(jié)構(gòu)。內(nèi)置8個FMMU單元,具有FMMU邏輯地址映射功能;內(nèi)置8個SM通道,方便對芯片內(nèi)存區(qū)域組織管理;支持 4KB寄存器空間、8KB過程數(shù)據(jù)存儲空間;支持64位分布時鐘,為微處理器提供高精度的中斷信號。CF110x系列支持眾多的PDI引腳,可以在沒有應(yīng)用層微處理器的情況下直接驅(qū)動32路數(shù)字IO信號,也可以使用外部微處理器訪問,構(gòu)建復(fù)雜的EtherCAT從站。由于靈巧手位于整個系統(tǒng)的末端,因此保留一路 PHY 即可滿足設(shè)計需求。采用碼靈半導(dǎo)體CF1106系列芯片作為 ESC,只需在外部添加一個變壓器即可實現(xiàn)通訊功能。
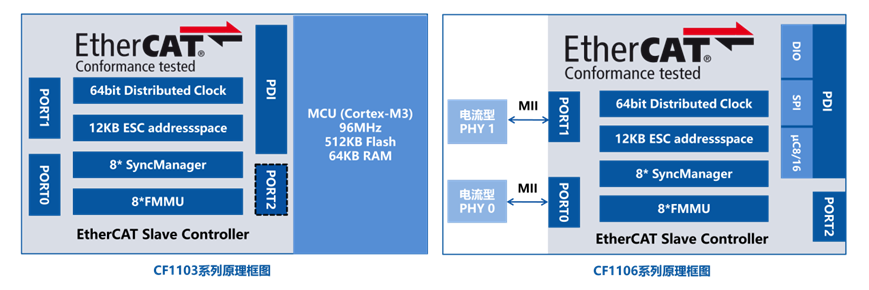
▲碼靈半導(dǎo)體CF110x系列芯片結(jié)構(gòu)框圖
▲碼靈半導(dǎo)體CF110x系列芯片實物圖
CF110x系列在靈巧手 EtherCAT系統(tǒng)中的應(yīng)用優(yōu)勢特點:產(chǎn)品獲得德國倍福公司(Beckhoff)官方正式授權(quán),已通過ETG官方的一致性測試認(rèn)證,符合EtherCAT通信協(xié)議標(biāo)準(zhǔn);內(nèi)置8個現(xiàn)場總線內(nèi)存管理單元(FMMU)、8個同步管理器(SM),產(chǎn)品支持三種數(shù)據(jù)接口(PDI)-數(shù)字I/O,SPI和8/16 位uC接口;內(nèi)置64位分布式時鐘(DC),可實現(xiàn)EtherCAT從站的高精度同步(<< 1μs);可選擇性集成32位ARM Cortex-M3內(nèi)核微控制器(MCU)或2個電流型PHY(兼容100BASE-TX),具有抗干擾能力強(qiáng)、信號完整性高和穩(wěn)定性好的優(yōu)點;多種封裝形式可選,支持QFN64L(9x9mm)、QFN88L(10x10mm)、QFN100L(12x12mm)封裝。EtherCAT 作為一種國際通用的工業(yè)以太網(wǎng)實時通訊協(xié)議,因此基于 EtherCAT 通訊技術(shù)設(shè)計的人形機(jī)器人靈巧手,可以與世界上不同機(jī)構(gòu)基于EtherCAT設(shè)計的產(chǎn)品相結(jié)合,從而得到進(jìn)一步的推廣和應(yīng)用。
碼靈半導(dǎo)體針對CF110x系列實現(xiàn)的靈巧手 EtherCAT系統(tǒng)應(yīng)用提供靈活便捷、簡單易用的豐富軟硬件開發(fā)工具,以及資深團(tuán)隊的技術(shù)支持,方便工程師開發(fā)及進(jìn)行移植測試等,助力客戶項目快速實現(xiàn)升級迭代。碼靈半導(dǎo)體CF110x系列EtherCAT從站控制器芯片工作溫度范圍為-40℃~85℃,并提供多種封裝,目前已投入量產(chǎn)供貨并開放送樣。
-
人機(jī)交互
+關(guān)注
關(guān)注
12文章
1248瀏覽量
56475 -
ethercat
+關(guān)注
關(guān)注
19文章
1124瀏覽量
40049 -
人形機(jī)器人
+關(guān)注
關(guān)注
7文章
739瀏覽量
17633 -
靈巧手
+關(guān)注
關(guān)注
0文章
35瀏覽量
77
發(fā)布評論請先 登錄
堪稱地表最強(qiáng)“打工人”,人形機(jī)器人Figure02領(lǐng)銜靈巧手進(jìn)化

機(jī)器人靈巧手進(jìn)入規(guī)模量產(chǎn)時刻!4款新品亮相

價值量占人形機(jī)器人超30%,十大國產(chǎn)靈巧手方案匯總
伺服電動缸在人形機(jī)器人中的應(yīng)用
為什么人形機(jī)器人更討人喜歡?
如何選擇合適的EtherCAT
EPR6-S工業(yè)機(jī)器人通過EtherCAT轉(zhuǎn)profinet網(wǎng)關(guān)接入西門子系統(tǒng)
基于虛擬現(xiàn)實的機(jī)器人靈巧手遙操作平臺的設(shè)計和實現(xiàn)
Shadow仿人靈巧手動力學(xué)研究
人形機(jī)器人崛起:靈巧手與空心杯電機(jī)市場的雙重機(jī)遇
兆威機(jī)電發(fā)布機(jī)器人靈巧手重磅新品!單板控制,17個自由度,壽命大于10年
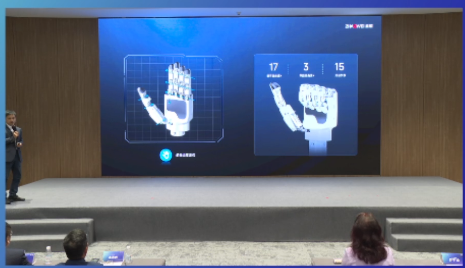
人形機(jī)器人“靈巧手”,正在接近27個自由度的人手

虹科分享 功夫機(jī)器人來了!CMG擂臺之上的技術(shù)決勝點是什么?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論