") 基于模型的顯微手術機器人設計
基于模型的顯微手術機器人設計
| 作者楊量景博士,浙江大學
顯微外科技術和工具使外科醫(yī)生能夠以極高的精度對人體組織的神經、血管和微小結構執(zhí)行復雜的手術。雖然顯微外科手術在改善患者治療效果方面顯示出巨大的潛力,但在亞毫米級狹窄的工作空間內進行操作需要非凡的穩(wěn)定性和靈活性。熟練的外科醫(yī)生可以連接直徑在 0.3 到 0.8 毫米(mm)之間的血管。然而,外科醫(yī)生手部不可避免的生理性震顫限制了此類吻合手術的療效。此外,受限解剖結構中的工作空間和運動學挑戰(zhàn)可能需要多次設計迭代,這既耗時又費錢。
微型手術機器人可以幫助外科醫(yī)生克服狹窄工作空間、手部震顫和疲勞帶來的限制。然而,這些機器人的設計帶來了一系列新的挑戰(zhàn)。首先,為了減少外科醫(yī)生學習新工具的時間,機器人必須能夠協(xié)助完成不同類型的手術,而不僅僅是一種。其次,與無人車間中的工業(yè)機器人不同,微型手術機器人直接用于人體,因此在設計時必須將患者安全放在首位。最后,為了最大限度地減少組織損傷和減少恢復時間,機器人必須是微創(chuàng)的——最好是通過一個小切口進行工作。
許多設計決策都取決于盡量減少侵入性,同時確保外科醫(yī)生擁有足夠的自由度來有效地執(zhí)行手術。對于這個權衡問題,沒有一個放之四海而皆準的答案,因此,顯微手術機器人設計團隊通常嚴重依賴反復試驗的方法。他們必須指定需求、創(chuàng)建滿足這些需求的設計,然后組裝原型。然后,設計團隊對原型進行測試,以進一步細化需求,然后重復此循環(huán)。通常需要多次進行迭代優(yōu)化,而由于每次迭代都要搭建硬件原型,會使迭代周期變得漫長。
在浙江大學,我和我的同事采用以設計為中心、基于模型的方法來開發(fā)機器人輔助微創(chuàng)手術系統(tǒng)。利用這種方法,我們最近設計了一種基于平行四邊形結構的吻合和眼科手術機器人操作器。我們用 Simulink 進行了計算分析和仿真測試和 Simscape Multibody 來可視化操作器的末端執(zhí)行器軌跡,并確認設計滿足安全性和手術可操作性的要求(圖 1)。這種方法加快了開發(fā)速度,使我們能夠在投入時間和資源構建硬件原型之前發(fā)現(xiàn)并解決許多設計問題。
圖 1. 機械手 Simscape Multibody 模型的動畫,展示了圍繞遠程運動中心 (RCM) 的運動。
設計機械機構
我們通過定義顯微外科手術操作器的需求和設計目標開始了我們的設計過程。例如,其中包括尖端的精度目標小于 10 微米、運動范圍為 20x20x20 毫米,以及系統(tǒng)末端執(zhí)行器的快速更換機制,使外科醫(yī)生能夠在手術過程中快速更換器械。
該系統(tǒng)的一個關鍵設計組件是遠程運動中心 (RCM) 機制,它將儀器的自由度 (DOF) 限制為三個旋轉 DOF(ψ、φ 和 θ) 圍繞切口,并在器械插入方向上有一個平移自由度 (Z)。我們設計了一個雙平行四邊形結構,使末端執(zhí)行器能夠在整個工作空間內移動,運動范圍如下:ψ:±45°;φ:±75°;θ:360°;Z:32毫米。我們首先通過基于第一性原理的數(shù)學模型分析了該結構,然后在 SolidWorks 中為其創(chuàng)建了一個 CAD 組件(圖 2)。

圖 2. 雙平行四邊形結構的 SolidWorks 裝配體。
在 Simscape Multibody 中執(zhí)行基于仿真的分析
我們的下一步是使用 Simscape Multibody Link 插件從 SolidWorks 導出 CAD 組件,然后將生成的 XML 多體描述文件導入 Simscape Multibody 以創(chuàng)建我們設計的 Simscape模型(圖 3)。我們在 ?、ψ 和 Z 關節(jié)處添加了電機以進行運動控制,并使用位置傳感器運行了多次模擬以跟蹤末端執(zhí)行器的位置和運動。
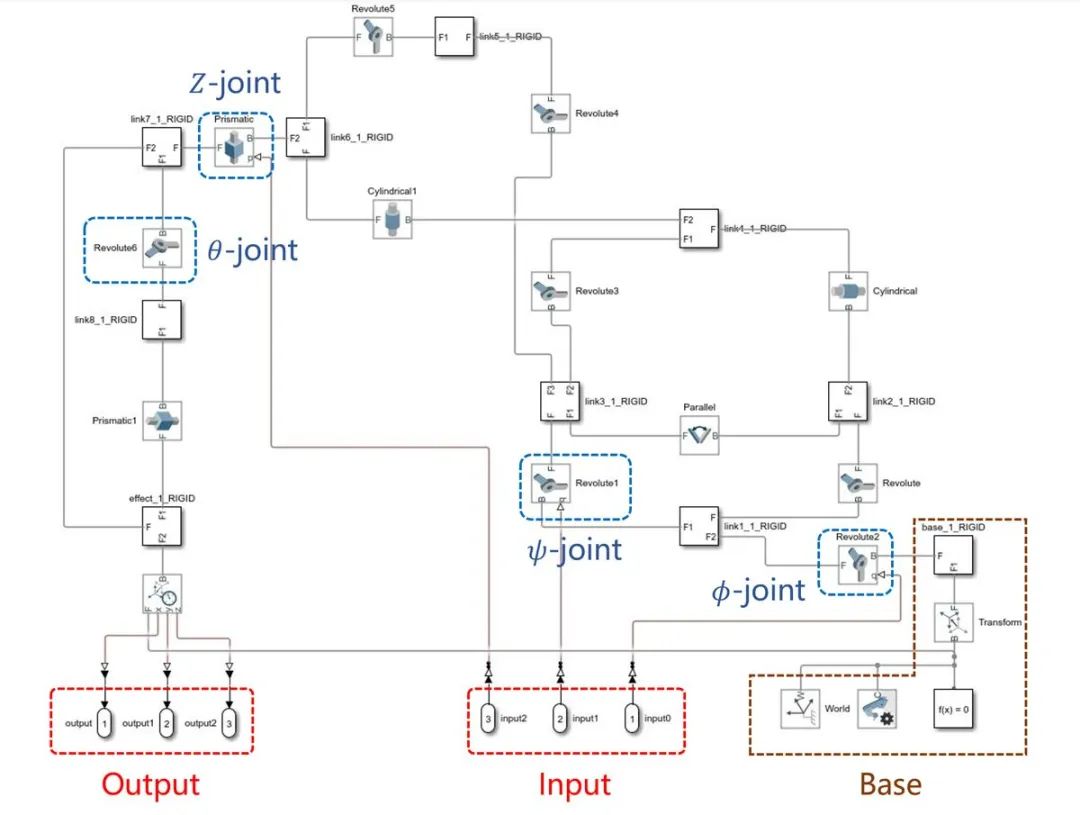
圖 3. 機械手的 Simscape Multibody 模型。
通過在 MATLAB 中分析和繪制這些模擬的結果,我們可視化了吻合手術中立方體空間內末端執(zhí)行器的范圍以及眼科手術中球形空間內末端執(zhí)行器的范圍(圖 4)。這是為了確保患者的安全以及手術成功的高概率,并且在手術過程中可以觸及解剖結構中的所有點。該評估需要使用機器人的運動學來開發(fā)點云并評估傳統(tǒng)手術干預中的軌跡。
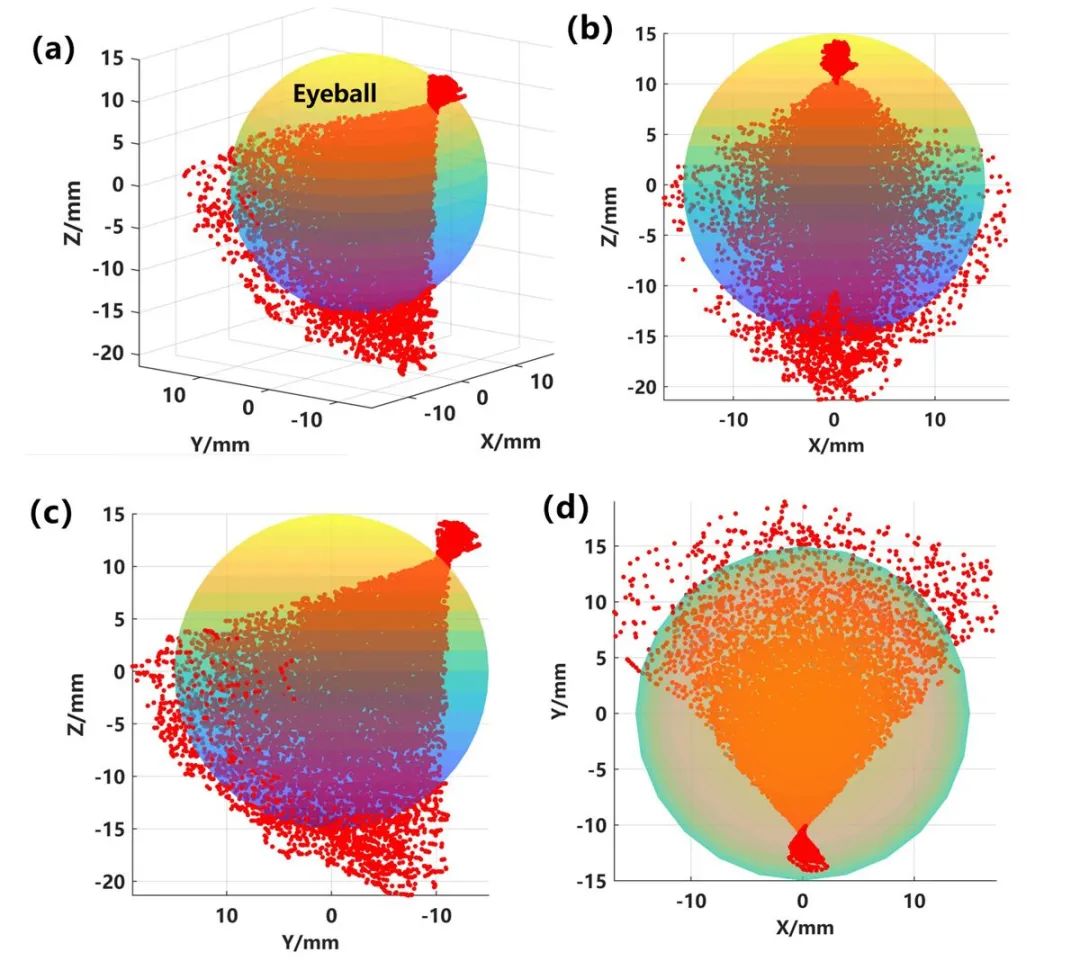
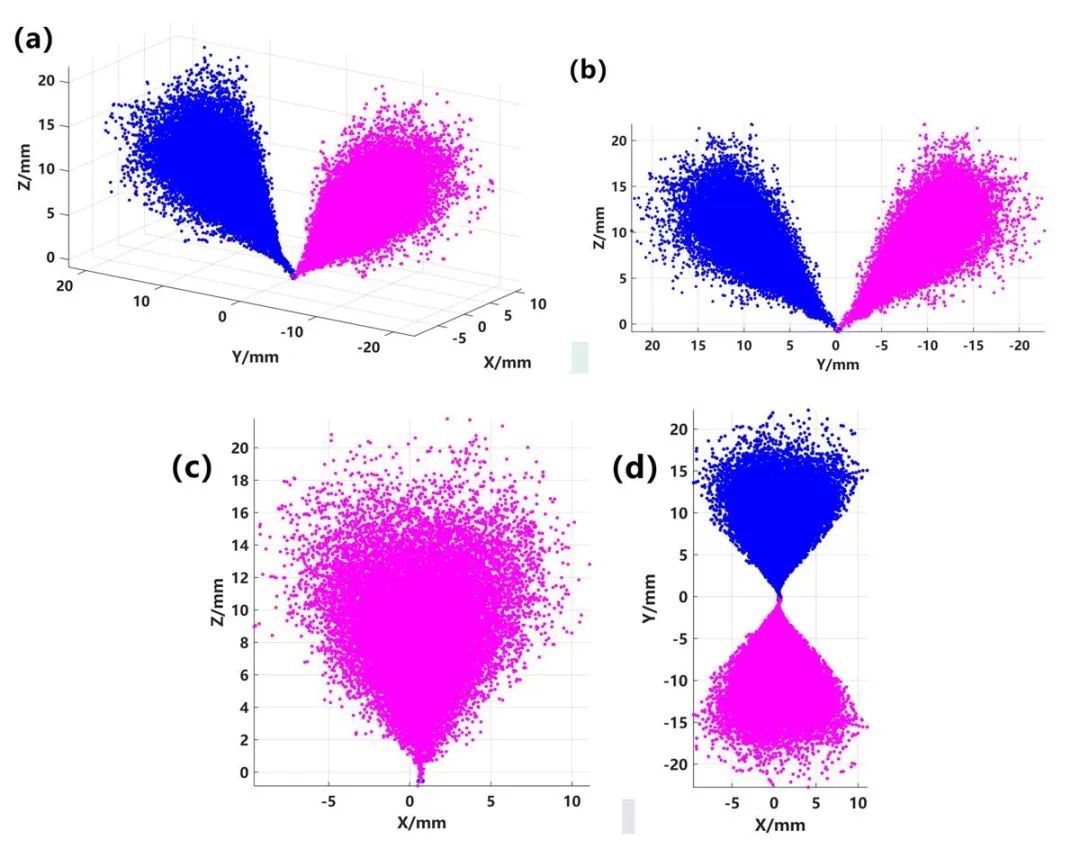
圖 4. 眼科手術(第一)和吻合手術(第二)工作空間的多種視圖。
我們還進行了模擬,追蹤末端執(zhí)行器的運動和軌跡,以確認設計滿足眼球表面弧形運動的手術要求(圖 5)。
 圖 5. Simscape Multibody模擬顯示了末端執(zhí)行器沿弧線的運動。
圖 5. Simscape Multibody模擬顯示了末端執(zhí)行器沿弧線的運動。
基于模型的方法的主要優(yōu)勢
在我們的研究中,我們發(fā)現(xiàn)所采用的基于模型的方法有幾個關鍵優(yōu)勢。其中最有價值的是能夠快速迭代設計,以確保它在轉移到物理實現(xiàn)之前在數(shù)字領域完全發(fā)揮作用。在紙上或 CAD 軟件中創(chuàng)建設計并知道它在理論上應該可行是一回事,但是,當我們通過 Simulink 和 Simscape 的模擬看到它在虛擬環(huán)境中工作時,我們會順理成章的獲得進一步的理解,從而改進它。
基于模型的方法可以獲得數(shù)字模型,我們可以利用 3D 打印技術結合仿真分析對機器人機構進行快速成型,從而進一步縮短開發(fā)周期。基于模型的方法設計的硬件測試表明,原型成功地將 RCM 點維持在患者眼睛上(圖 6)。
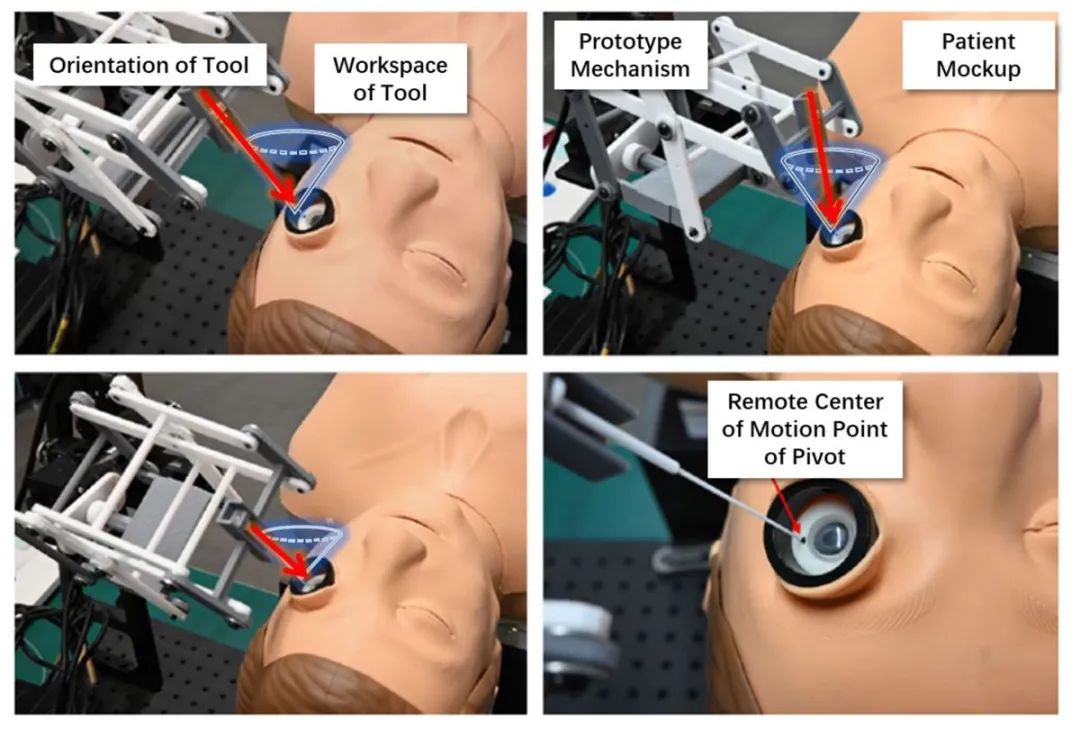
圖 6. 基于模型的方法所得到的設計的硬件測試保持了眼圖上的 RCM 點。
此外,使用 Simulink 和 Simscape 工作使我們團隊中的許多學生能夠更輕松地跟上進度并協(xié)調他們的工作。學生在畢業(yè)前會從一個項目轉到另一個項目,基于模型的方法可以幫助他們將自己所做的工作傳遞給其他人。模型更容易解釋和理解,因此當下一組人想要擴展或概括前一個團隊的工作時,他們知道從哪里開始以及做什么。
最后,既然我們已經證明了機械設計的可行性,我們就可以開始開發(fā)控制系統(tǒng),并在開發(fā)過程中進一步優(yōu)化結構。使用 MATLAB 和 Simulink 進行基于模型的設計將有助于這兩項工作,使我們能夠通過模擬驗證整個系統(tǒng)的安全性并縮短整個開發(fā)周期。
關于作者
楊量景博士現(xiàn)為浙江大學 ZJU-UIUC 學院助理教授。他的研究興趣包括機器人、計算機視覺和視覺引導微操作。
-
機器人
+關注
關注
212文章
29258瀏覽量
210814 -
Simulink
+關注
關注
22文章
538瀏覽量
63418 -
模型
+關注
關注
1文章
3462瀏覽量
49785 -
手術機器人
+關注
關注
2文章
133瀏覽量
16057
原文標題:浙江大學 × MATLAB | 應用基于模型的方法開發(fā)顯微手術機器人
文章出處:【微信號:MATLAB,微信公眾號:MATLAB】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
大模型加持手術機器人,腦科手術取得突破!
《機器人設計與實現(xiàn)》——低成本DIY機器人,一本機器人制作的經典入門書
國外手術機器人新技術開發(fā)情況
全國首例!西安女子接受機器人牙科手術
全球首例骨科手術機器人5G遠程手術成功完成產生了多大的影響?
剛柔軟機器人設計與仿真分析實例解析
如何去實現(xiàn)一種基于傳感器的機器人手術系統(tǒng)設計
機器人設計教程之基于“創(chuàng)意之星”的機器人設計資料說明





 工商網監(jiān)
工商網監(jiān)
評論