 輕松上手CANoe Scenario Editor—智能網聯工程師入門篇
輕松上手CANoe Scenario Editor—智能網聯工程師入門篇

作者 |小薛從不吃魚
小編 | 不吃豬頭肉
V2X(Vehicle-to-Everything,車與萬物通信)是一種先進的通信技術,使車輛能夠與周圍環境進行信息交換。這不僅包括與其他車輛(V2V)的互動,還涵蓋與基礎設施(V2I)和行人(V2P)的通信。通過V2X,車輛能夠實時獲取周圍信息,從而提升行駛安全性和交通效率,真正實現智能交通的愿景。
而智能汽車的世界中,CANoe的Car2X功能就像是一位靈動的翻譯官,輕松打破了車與車之間的“語言障礙”。通過無線信號交換著密切的消息。這不是偶像劇,而是CANoe的舞臺演出!它幫助汽車在復雜的交通環境中交流得如魚得水,無論是彼此提醒即將到來的交通信號,還是共享行駛速度的“小道消息”,都能輕松搞定。在這個充滿活力的舞場上,CANoe的Car2X功能不僅僅是調試工具,它更是一個搭建虛擬交通世界的樂高平臺,讓開發者在各種場景中盡情暢玩:模擬繁忙的都市交叉口、測試緊急剎車時的通信等,讀者可以使用CANoe測試DUT的V2X功能。
在進行V2X的仿真測試過程中,仿真場景的搭建是極為重要的,需要確認仿真場景下的Route和仿真使用的Station以及仿真過程中涉及到的事件屬性,請跟隨本文,深入學習了解場景搭建的方法。
軟件工具上選擇使用CANoe DE 18 SP2(截至目前最新的版本呦~)進行場景搭建,需要準備好CANoe、Option.Car2X的License。(沒有的小伙伴可以使用Demo版本的License進行學習哦!)

打開Scenario Editor
CANoe提供多個實用的工具,在Tools頁簽下打開本文的主角“Scenario Editor”。

認識Scenario Editor
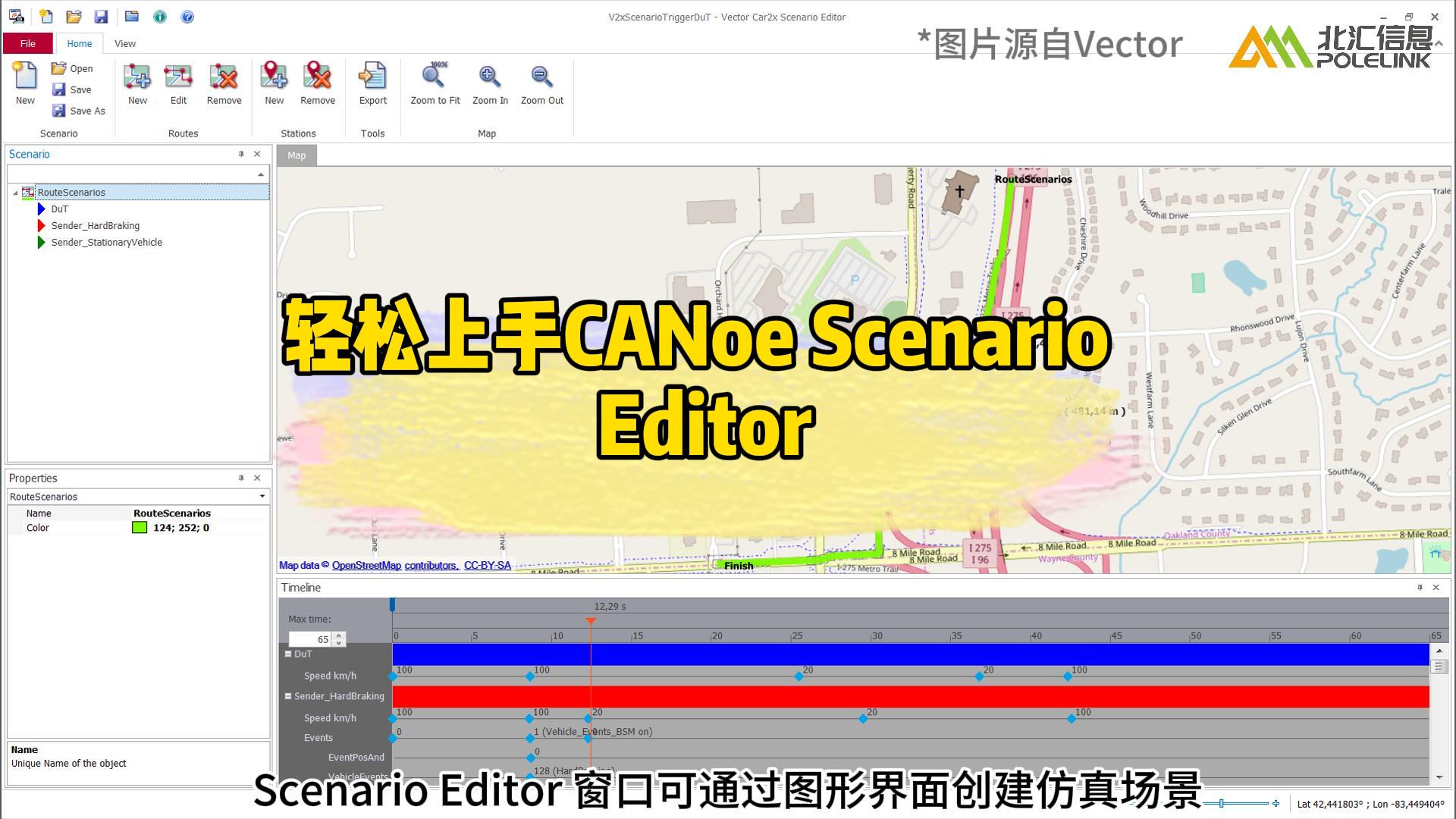
Scenario Editor 窗口可通過圖形界面創建交通場景,在進入到編輯界面后,可以先確認地圖參數配置,該窗口使用與 Map 窗口(想了解Map 窗口的使用,請后臺私信哦~)相同的地圖組件,也允許進行類似 Map 窗口的瓦片服務器(Tile Server)配置以及離線地圖配置。Scenario Editor 中的地圖配置獨立于Map 窗口,可通過點擊窗口中“Settings”功能按鈕打開地圖配置頁面配置地圖供應商等選項。Vector (OSM)是 Map 窗口默認使用的地圖供應商。為了避免在使用 CANoe 時受到第三方供應商的限制,自CANoe 14.0版本開始,Vector引入了自己的瓦片服務器,地圖數據可以直接從Vector(OSM)獲取。該服務器提供的地圖數據都基于開源地圖項目OpenStreetMap。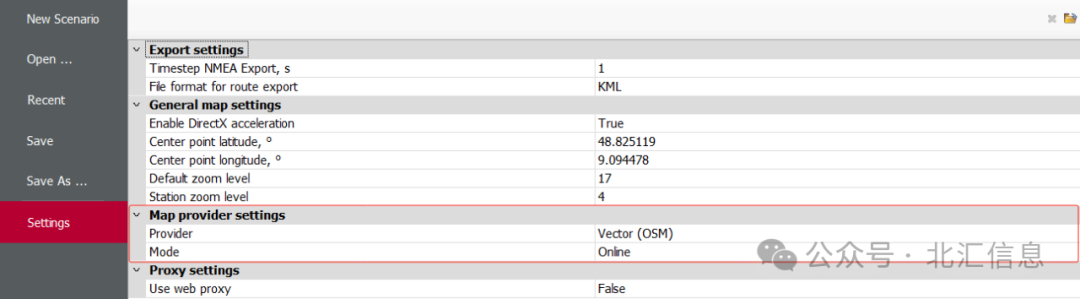 在 Scenario Editor 中可以獨立設置地圖中心點的地理坐標和地圖的縮放等級,點擊窗口中的“Zoom to Filt”按鈕,地圖會自動進行定位和縮放。
在 Scenario Editor 中可以獨立設置地圖中心點的地理坐標和地圖的縮放等級,點擊窗口中的“Zoom to Filt”按鈕,地圖會自動進行定位和縮放。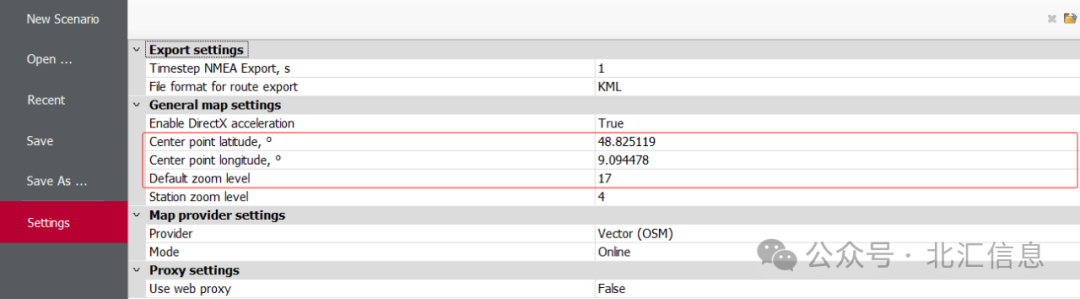

Scenario的編輯
選擇使用“Open”按鈕選擇打開未編輯完畢的場景,或者選擇“New Scenario”重新搭建新的場景,當出現誤刪除編輯界面的時候,可以使用“View”頁簽下的“Reset Layout”按鈕快速恢復到原始的圖形操作界面。
編輯Route
讀者可以選擇新建一個場景,導入預先編輯的kml文件或者第一次使用選擇新建Route。

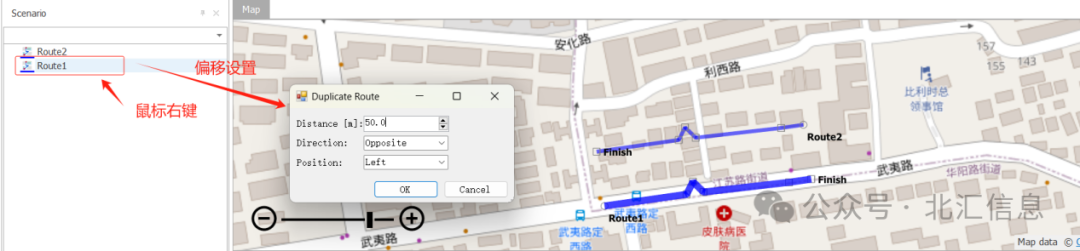
在編輯Route時,需要激活上圖的“Edit”選項,使用鼠標拖動即可編輯“waypoint”,或者找到想要更改的點,直接賦值已知經緯度。這樣的優點是Route更為精確。Route也可以使用上圖的“Export”選項導出復用。運動方向從Route1到Finish,在“waypoint”的前后可以鼠標右鍵添加新的“waypoint”(當有轉彎等弧形場景時,足夠多的“waypoint”一定會用到哦!)在編輯Route時,根據實際的場景可能需要創建多個Route,可以在原Route的基礎上進行位置偏移:

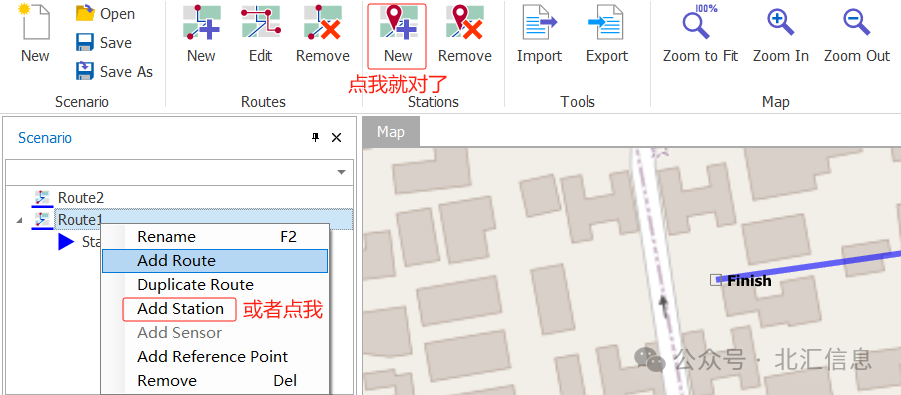
編輯Station
在創建完畢完整的Routes后,就可以創建仿真過程中的Station:
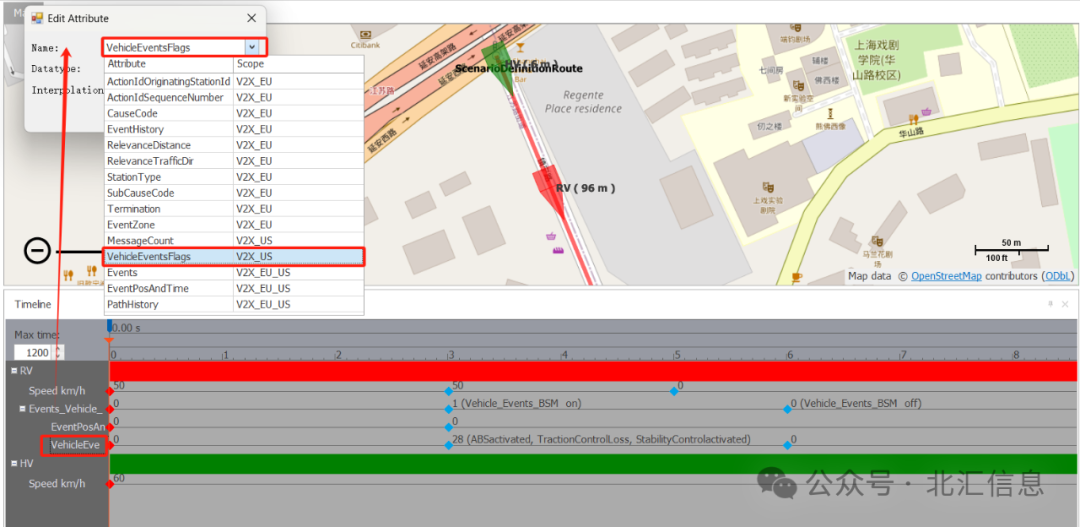
一般的,Station命名規則為:主車命名為Hv,遠車命名為Rv1、Rv2等,按照數量依次類推,路側單元命名為RSU,如果需要點位則命名為Point1、Point2等。每個Station都會在右下角生成一條時間軸,在時間軸上添加速度節點來規劃運動狀態;航向角隨著路徑自動計算。下圖表示Hv速度在第0秒從0km/h開始,在5秒的時候達到30km/h,然后以30km/h運動到場景開始后第13秒,然后加速到第17秒的45km/h,選中點位之后可以手動輸入其在時間軸的位置,輸入速度參數,也可以直接在時間軸上拖動點位。

車輛加速度是根據兩個點位的時間差和速度差自動計算的,設置固定加速度需要手動計算后調整節點在時間軸上的位置,對于Station還可以鼠標右鍵添加賦予其特殊的屬性:
最后,保存編輯后的Scenario文件,文件后綴為.scn。

使用Scenario文件
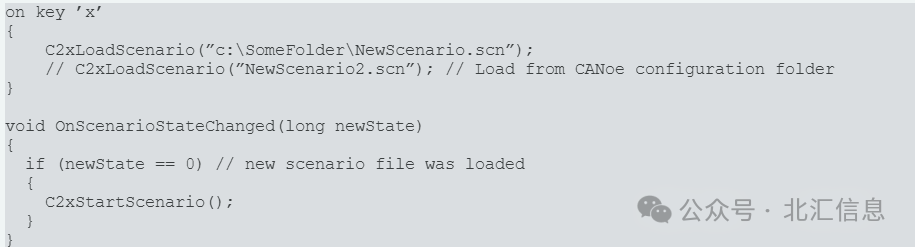
對于Scenario文件的使用,方法較多,可以使用CANoe提供的“Scenario Manager”窗口,在此窗口下可以直接打開對應的.scn文件進行加載使用。 或使用CAPL的方式進行加載文件,對應CAPL函數:long C2xLoadScenario(char* scenarioFilePath),通過腳本的方式,可以配置其給到自定義系統變量從而使用Panel進行加載場景使用。
或使用CAPL的方式進行加載文件,對應CAPL函數:long C2xLoadScenario(char* scenarioFilePath),通過腳本的方式,可以配置其給到自定義系統變量從而使用Panel進行加載場景使用。

管理Station
為了在需要測量的窗口中顯示應用消息的數據內容(信號),必須始終保證接收到的包與數據庫(ITS (Intelligent Transportation System)站點)中創建的節點之間的關聯。Station Manger窗口提供相應的映射關系編輯,以確保觀察到的信號(例如在Data窗口中顯示的信號)確實來自要進行測量的 ITS 站點。

至此,你已經學會了仿真場景的搭建和使用啦~完結撒花*★,°*:.☆( ̄▽ ̄)/$:*.°★*
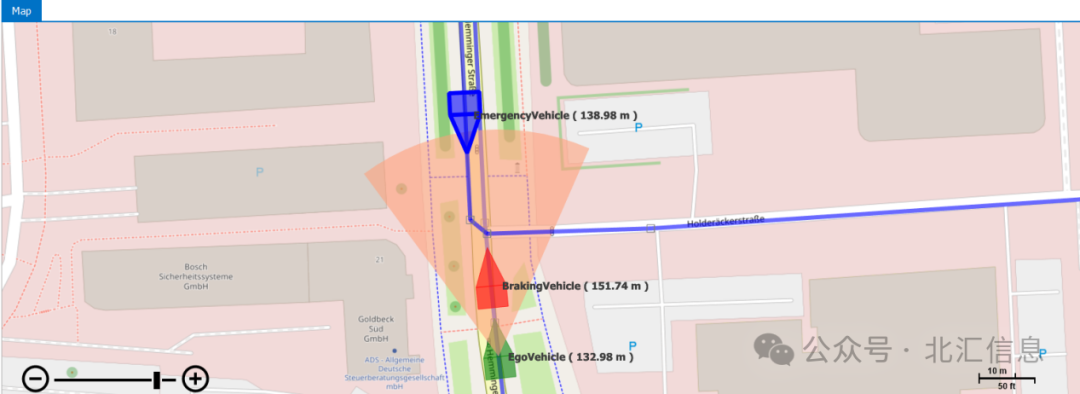
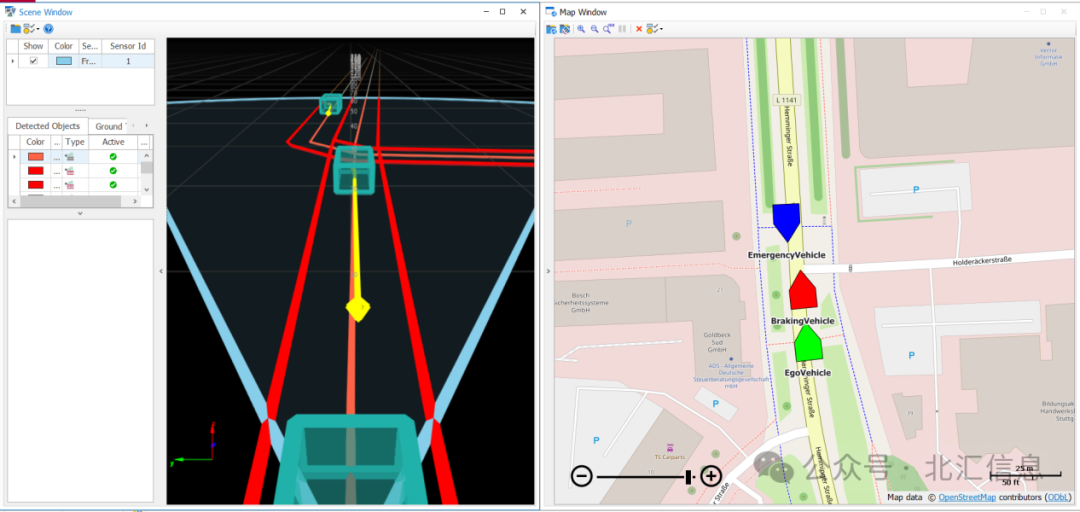
再來談談仿真可視化,CANoe的場景仿真可視化功能非常強大,除了大家所熟知的Panel可視化,一般可以使用包括 Map 窗口的二維仿真顯示和 Scene 窗口的三維仿真顯示。二維仿真側重于快速展示拓撲和組件之間的關系。通過直觀的二維圖形界面,用戶可以輕松理解仿真組件的連接和通信,便于進行初步設計和驗證。相比之下,三維仿真則提供了更為復雜和真實的環境,能夠模擬實際的物理空間和動態交互,適合于深入分析和測試復雜系統。三維窗口允許用戶觀察組件在三維空間中的運動,適用于需要考慮真實道路環境的應用場景,如ADAS仿真方面的毫米波雷達測試。當使用Scenario Editor工具編輯場景后也可適用于Scene窗口(關于此窗口的使用也可以后臺私信哦),編輯的場景以及Scene窗口和Map窗口對比如下:

總結
總的來說,二維仿真在于簡化和快速驗證,而三維仿真則強調真實感和復雜性。選擇合適的仿真方式可以幫助工程師更有效地進行系統設計和測試。一般的,考慮到V2X方面的仿真和地圖的強關聯性,推薦使用Map窗口進行二維可視化。
場景搭建是V2X仿真過程中重要的一環,熟練使用其應用到V2X仿真工程是一個智能網聯工程師必備的技能。
-
CAN
+關注
關注
57文章
2900瀏覽量
467030 -
仿真測試
+關注
關注
0文章
98瀏覽量
11558 -
智能網聯
+關注
關注
4文章
621瀏覽量
23596
發布評論請先 登錄

電子工程師自學資料及各種電路解析

每周推薦!電子工程師自學資料及各種電路解析
電子工程師自學速成 —— 提高篇
電子工程師自學速成——入門篇
【「零基礎開發AI Agent」閱讀體驗】總體預覽及入門篇
從“設計到生產”的蛻變:華秋DFM如何讓工程師們“輕松上陣”?
Allegro工程師能力升級建議 工程師技能如何升級進階






 工商網監
工商網監
評論