") 最新圖優(yōu)化框架,全面提升SLAM定位精度
最新圖優(yōu)化框架,全面提升SLAM定位精度
0. 這篇文章干了啥?
同時(shí)定位與地圖構(gòu)建(SLAM)是一項(xiàng)關(guān)鍵技術(shù),允許移動(dòng)機(jī)器人在部分或完全未知的環(huán)境中自主導(dǎo)航。它包括使用機(jī)載傳感器同時(shí)估計(jì)機(jī)器人狀態(tài)和構(gòu)建傳感器檢測(cè)到的環(huán)境地圖。SLAM可以根據(jù)傳感器和地圖構(gòu)建技術(shù)的類(lèi)別進(jìn)行分類(lèi),如視覺(jué)SLAM、激光SLAM、慣性SLAM等。
解決SLAM問(wèn)題的經(jīng)典方法可以分為基于濾波的方法和基于圖的方法。在1986年提出SLAM問(wèn)題的前二十年里,基于概率公式的濾波方法已經(jīng)實(shí)現(xiàn)了準(zhǔn)確的估計(jì)。然而,在大規(guī)模問(wèn)題中更新協(xié)方差矩陣在計(jì)算上是昂貴的。基于圖的方法最早由Lu和Milios在1997年引入,隨著圖的增長(zhǎng),計(jì)算成本較低。隨著計(jì)算能力的提高,基于圖的SLAM的優(yōu)化算法相比經(jīng)典的濾波方法(如擴(kuò)展卡爾曼濾波、Rao-Blackwellized粒子濾波和信息濾波)獲得了廣泛關(guān)注。Wilbers等人展示了基于圖的方法在定位方面比粒子濾波具有更高的精度。
姿態(tài)圖優(yōu)化(PGO)可以建模為一個(gè)非凸優(yōu)化問(wèn)題,是基于圖的SLAM的基礎(chǔ),其中它將每個(gè)姿態(tài)與一個(gè)頂點(diǎn)關(guān)聯(lián),將每個(gè)測(cè)量與圖的一條邊關(guān)聯(lián),需要從有噪聲的相對(duì)測(cè)量中估計(jì)多個(gè)未知姿態(tài)。在三維空間中的姿態(tài)通常包括旋轉(zhuǎn)和平移,旋轉(zhuǎn)可以使用歐拉角、軸角(so(3))、特殊正交群(SO(3))或四元數(shù)(Q)表示,平移由一個(gè)三維向量t指定。此外,整體姿態(tài)還可以使用特殊歐氏群(SE(3))、李代數(shù)(se(3)或雙四元數(shù)(DQ)表示。不同的建模方法會(huì)產(chǎn)生不同的約束,如在se(3)中沒(méi)有約束,在SE(3)中有矩陣正交和行列式約束,或在Q中有球面約束。選擇與問(wèn)題結(jié)構(gòu)兼容的簡(jiǎn)單表示將導(dǎo)致一個(gè)更容易解決和更準(zhǔn)確的模型。
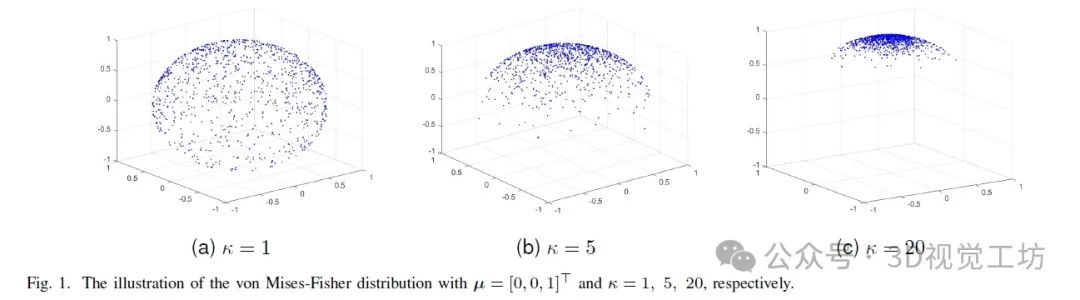
在過(guò)去的二十年中,許多模型已經(jīng)根據(jù)噪聲的不同統(tǒng)計(jì)分布和姿態(tài)表示方法得到了發(fā)展。同時(shí),也提出了許多高效的優(yōu)化算法來(lái)解決這些模型。從模型的角度來(lái)看,旋轉(zhuǎn)噪聲的統(tǒng)計(jì)分布通常分為高斯分布或各向同性的馮米塞斯-費(fèi)舍爾(vMF)分布,而平移噪聲統(tǒng)一表現(xiàn)為高斯噪聲。基于最大似然估計(jì),在se(3)上的高斯噪聲可以直接導(dǎo)出一個(gè)無(wú)約束的非線性最小二乘模型。同樣,Cheng等人建立了基于單位雙四元數(shù)的最小二乘模型,并提出了一種更有效的方法來(lái)計(jì)算雅可比矩陣。通過(guò)消除兩個(gè)變量,他們的模型也是無(wú)約束的。另一種建模方法使用SO(3)表示旋轉(zhuǎn),假定其服從vMF分布,并導(dǎo)出具有正交和行列式約束的模型。由于se(3)需要轉(zhuǎn)換來(lái)描述運(yùn)動(dòng)過(guò)程,用SO(3)或Q和一個(gè)三維向量表示的目標(biāo)函數(shù)的表達(dá)式相比無(wú)約束模型更簡(jiǎn)潔;然而,約束的引入增加了挑戰(zhàn)。
從算法的角度來(lái)看,提出了幾種高效且準(zhǔn)確的方法來(lái)解決SLAM中的大規(guī)模問(wèn)題。諸如隨機(jī)梯度下降等一階優(yōu)化方法可以減少梯度計(jì)算的復(fù)雜性,并有效地解決無(wú)約束優(yōu)化問(wèn)題。收斂速度更快的算法,如高斯-牛頓方法、Levenberg--Marquardt方法、信賴域方法也被引入來(lái)解決該問(wèn)題。與計(jì)算矩陣逆不同,使用QR或Cholesky分解等矩陣分解技術(shù)來(lái)降低復(fù)雜性,并提出了增量版本。Grisetti等人和Wagner等人提出了基于流形的高斯-牛頓算法,其中雅可比矩陣具有稀疏結(jié)構(gòu),更新過(guò)程避免了大規(guī)模線性方程系統(tǒng)的昂貴存儲(chǔ)。
然而,二階算法僅在局部區(qū)域具有快速收斂率,對(duì)于非凸問(wèn)題通常返回局部極小值。后來(lái)的工作集中于找到更好的初始點(diǎn)并確認(rèn)解的最優(yōu)性。Rosen等人提出了一種基于Powell的Dog-Leg信賴域方法的穩(wěn)健增量最小二乘估計(jì),并提高了數(shù)值穩(wěn)定性。Carlone等人通過(guò)檢查對(duì)偶間隙推導(dǎo)了一個(gè)帶約束的二次規(guī)劃并驗(yàn)證了最優(yōu)解。通過(guò)擴(kuò)展可行集到其凸閉包,一種凸松弛方法有效地克服了非凸問(wèn)題初始點(diǎn)選擇的難題。此外,Rosen等人將模型松弛為一個(gè)半定規(guī)劃,并證明了只要噪聲低于某個(gè)臨界閾值,其松弛的最小化結(jié)果提供了一個(gè)精確的最大似然估計(jì)。Fan和Murphey提出了PGO的一個(gè)上界,并通過(guò)廣義近端方法解決它,該方法可以收斂到一階臨界點(diǎn)且不依賴于黎曼梯度。另一種找到更好局部極小值或全局極小值的方法依賴于初始化技術(shù)。他們指出非凸旋轉(zhuǎn)估計(jì)是SLAM困難的真正原因,平移對(duì)旋轉(zhuǎn)估計(jì)影響較小。因此,計(jì)算一個(gè)好的旋轉(zhuǎn)估計(jì)將提高算法的性能。
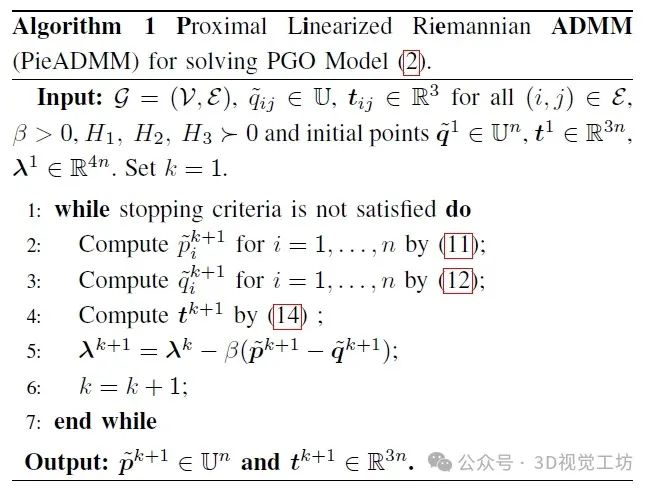
我們提出了一種非凸姿態(tài)圖優(yōu)化的近端線性化黎曼交替方向乘子法(PieADMM),它使用最新的部分信息更新其他變量。我們的子問(wèn)題不僅具有閉式解,而且可以并行計(jì)算,從而使每次更新的時(shí)間復(fù)雜性較低。這一優(yōu)勢(shì)在大規(guī)模數(shù)值實(shí)驗(yàn)中得到了驗(yàn)證。從理論上講,收斂性分析補(bǔ)充了我們的發(fā)現(xiàn)。
下面一起來(lái)閱讀一下這項(xiàng)工作~
1. 論文信息
標(biāo)題:Non-convex Pose Graph Optimization in SLAM via Proximal Linearized Riemannian ADMM
作者:Xin Chen, Chunfeng Cui, Deren Han, Liqun Qi
機(jī)構(gòu):北京航空航天大學(xué)
原文鏈接:https://arxiv.org/abs/2404.18560
2. 摘要
位姿圖優(yōu)化 (PGO) 是解決基于位姿的同時(shí)定位與地圖構(gòu)建 (SLAM) 問(wèn)題的一種著名技術(shù)。在本文中,我們使用單位四元數(shù)和三維向量表示旋轉(zhuǎn)和平移,并提出了一種基于馮·米塞斯-費(fèi)舍爾分布的新型 PGO 模型。從單位四元數(shù)導(dǎo)出的約束是球面流形,投影到這些約束上可以通過(guò)歸一化來(lái)計(jì)算。然后,我們開(kāi)發(fā)了一種近端線性化黎曼交替方向乘子法 (PieADMM) 來(lái)解決所提出的模型,該方法不僅具有低內(nèi)存需求,而且可以并行更新位姿。此外,我們建立了 PieADMM 以 O(1/?2) 的迭代復(fù)雜度找到我們模型的 ?-駐點(diǎn)解。通過(guò)對(duì)兩個(gè)合成數(shù)據(jù)集和四個(gè) 3D SLAM 基準(zhǔn)數(shù)據(jù)集的數(shù)值實(shí)驗(yàn),展示了我們所提出算法的效率。
3. 效果展示
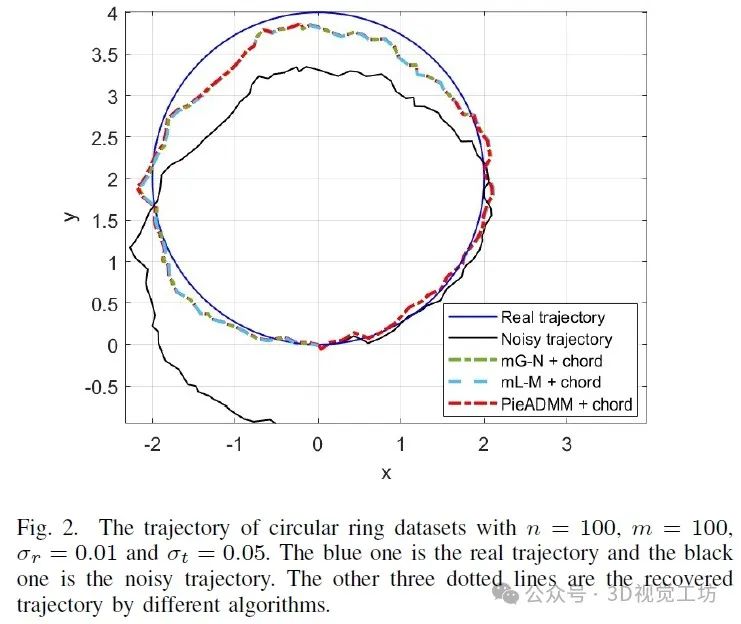
首先,我們使用不同的算法測(cè)試n = 100,m = 100的環(huán)形數(shù)據(jù)集。圖2顯示了當(dāng)σr = 0.01,σt = 0.05,并采用弦初始化時(shí)的俯視軌跡,三種方法在視覺(jué)上收斂于相同的解。我們還測(cè)試了里程計(jì)猜測(cè)初始化技術(shù)。由于恢復(fù)的軌跡幾乎重疊,并且很難觀察出差異,我們將它們省略了。
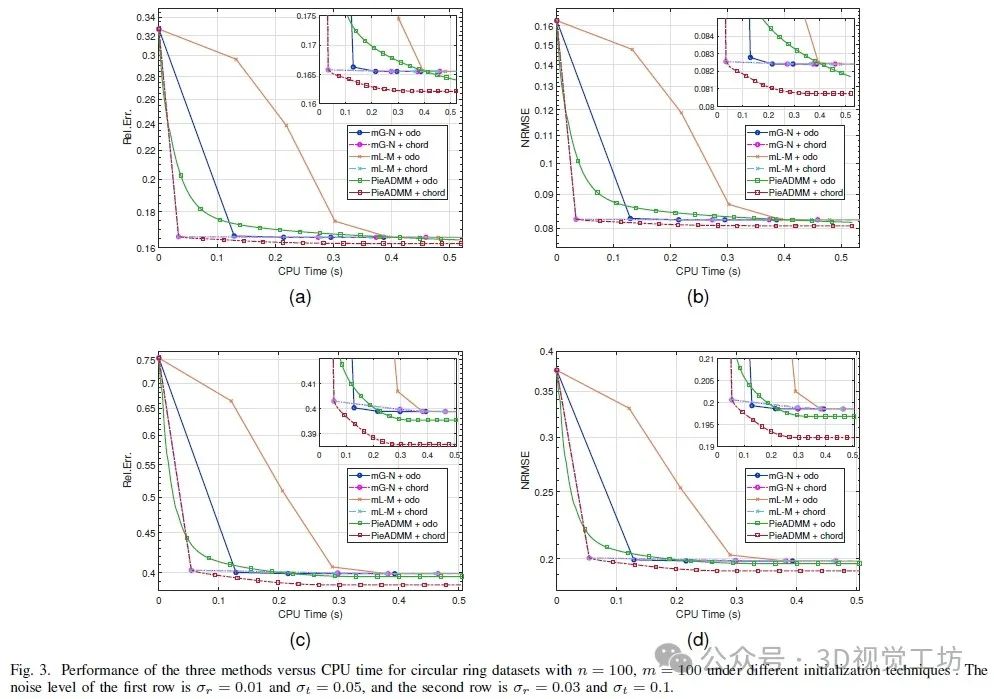
相反,我們?cè)趫D3中報(bào)告了優(yōu)化過(guò)程,記錄了在不同方法和初始化技術(shù)下,Rel.Err和NRMSE的下降趨勢(shì)以及CPU時(shí)間。由于我們的PieADMM能夠針對(duì)每個(gè)頂點(diǎn)并行更新,因此它可以比其他方法更快地收斂。此外,弦初始化可以在旋轉(zhuǎn)更新后給出平移的估計(jì),這提供了比其他方法更準(zhǔn)確的初始點(diǎn)。在此初始化下,我們的PieADMM可以收斂到具有較低相對(duì)誤差的解。與里程計(jì)猜測(cè)初始化相比,我們的PieADMM通常不如mG-N的前幾步準(zhǔn)確,但隨著迭代的進(jìn)行,它可以實(shí)現(xiàn)略微更好的性能。因此,我們將弦初始化作為下一步實(shí)驗(yàn)中的標(biāo)準(zhǔn)初始化技術(shù)。
4. 主要貢獻(xiàn)
(i) 我們提出了一種基于增強(qiáng)單位四元數(shù)和vMF分布的非凸姿態(tài)圖優(yōu)化模型,其中數(shù)據(jù)存儲(chǔ)成本低,單位四元數(shù)的投影可以通過(guò)歸一化計(jì)算。
(ii) 我們提出了一種PieADMM,其子問(wèn)題具有閉式解,并且可以并行更新。
(iii) 基于流形上的一階最優(yōu)條件,我們定義了模型的一個(gè)?-駐點(diǎn)解。然后,我們建立了PieADMM在找到?-駐點(diǎn)解時(shí)的迭代復(fù)雜度O(1/?2)。
(iv) 我們?cè)趦蓚€(gè)不同數(shù)據(jù)規(guī)模的合成數(shù)據(jù)集和四個(gè)三維SLAM基準(zhǔn)數(shù)據(jù)集上測(cè)試了我們的算法。數(shù)值實(shí)驗(yàn)驗(yàn)證了我們方法的有效性。
5. 基本原理是啥?
6. 實(shí)驗(yàn)結(jié)果
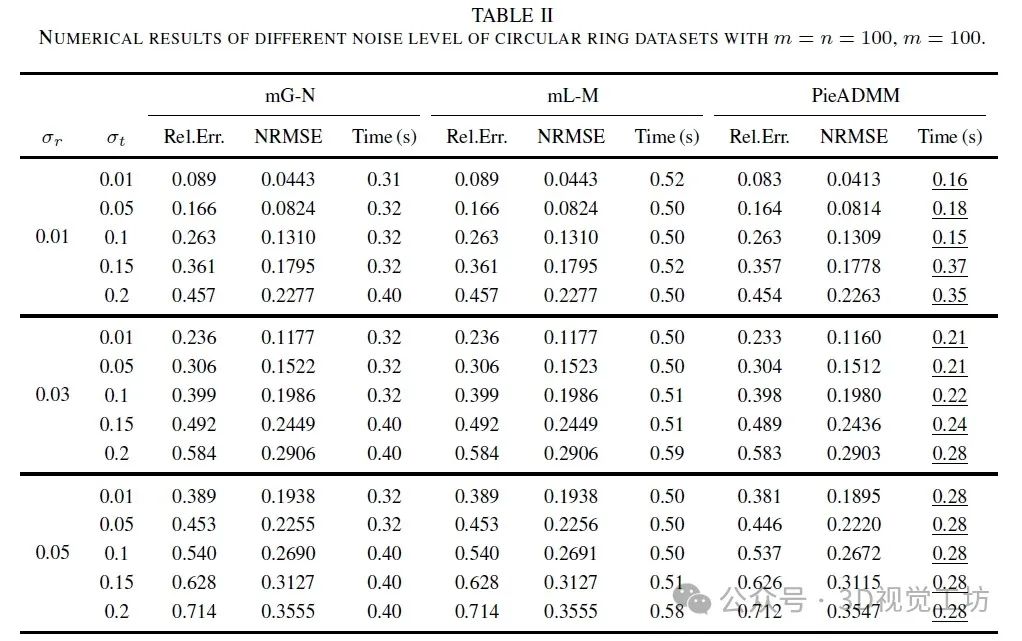
我們?cè)陬~外的噪聲水平下比較這些算法,并在表II中列出了關(guān)于Rel.Err、NRMSE和CPU時(shí)間的數(shù)值結(jié)果。我們發(fā)現(xiàn)PieADMM花費(fèi)更少的時(shí)間并且獲得更好的結(jié)果。
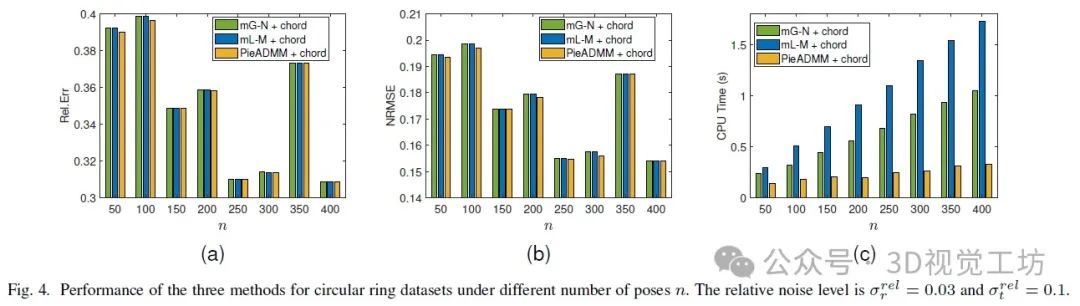
我們還測(cè)試了姿態(tài)數(shù)量n的影響。實(shí)際上,由于我們限制了機(jī)器人軌跡的范圍,同等級(jí)別的噪聲將在頂點(diǎn)數(shù)量增加時(shí)產(chǎn)生更大的影響。因此,在比較不同n的數(shù)據(jù)大小的影響時(shí),我們使用相對(duì)噪聲水平作為統(tǒng)一標(biāo)準(zhǔn),這意味著σr = 100 × σrelr / n和σt = 100 × σrelt / n。結(jié)果如圖4所示。圖4a和4b顯示了PieADMM的性能平穩(wěn),有時(shí)略優(yōu)于其他兩種方法。然而,PieADMM的運(yùn)行時(shí)間增加速度比它們慢得多,參見(jiàn)圖4c。這是因?yàn)閚的規(guī)模幾乎不影響旋轉(zhuǎn)子問(wèn)題的成本,它可以并行計(jì)算。此外,平移子問(wèn)題僅涉及矩陣乘法,并且不依賴于矩陣的逆。
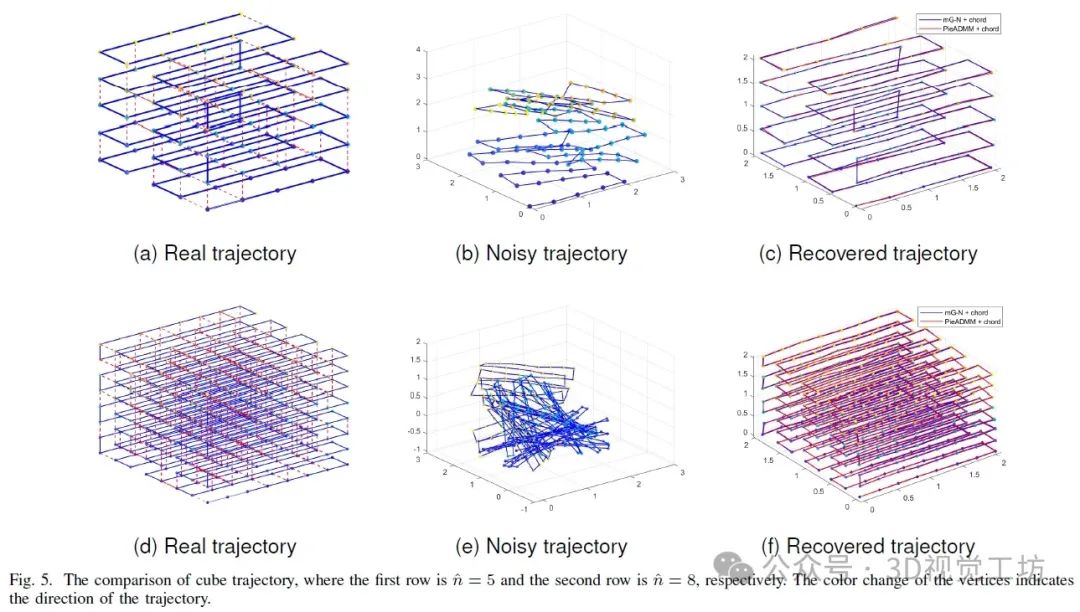
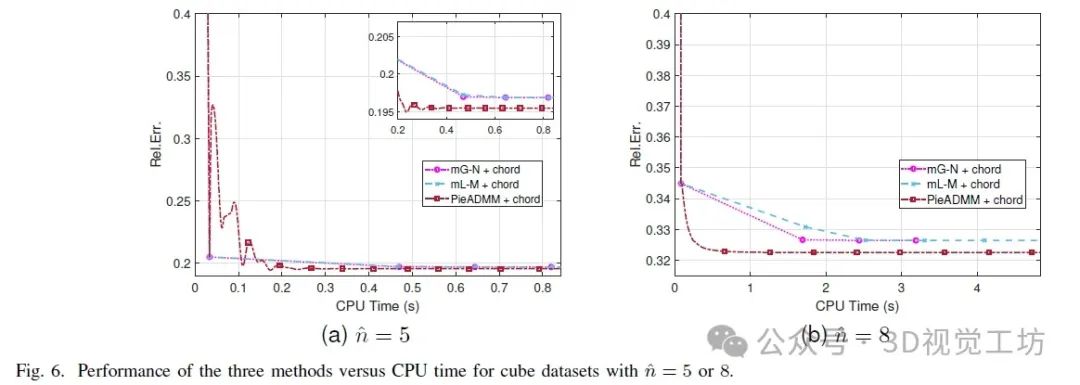
對(duì)于立方體數(shù)據(jù)集,讓?duì)襱 = σrelt /?n,其中σrelt表示平移的相對(duì)噪聲水平。我們首先考慮了?n = 5或8,σr = 0.1,σrelt = 0.1和pcube = 0.3的兩個(gè)例子。圖5a和5d顯示了真實(shí)軌跡,其中藍(lán)線由運(yùn)動(dòng)產(chǎn)生,紅色虛線由觀測(cè)產(chǎn)生。圖5b、5c和5e、5f分別是對(duì)應(yīng)于不同?n的嘈雜和恢復(fù)的軌跡。圖6顯示了Rel.Err隨著CPU時(shí)間的下降趨勢(shì),其中我們省略了圖像的上半部分以突出顯示細(xì)節(jié)。由于PGO模型是非凸的,而PieADMM是非單調(diào)的算法,曲線可能會(huì)振蕩。然而,它總是在更短的時(shí)間內(nèi)收斂到更高精度的解。
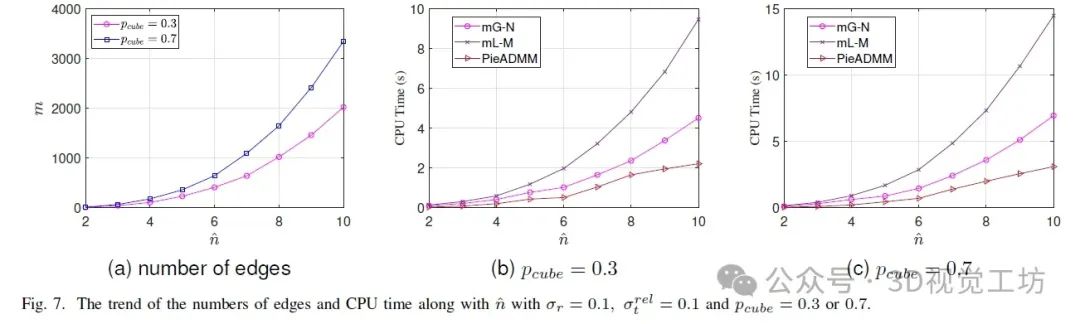
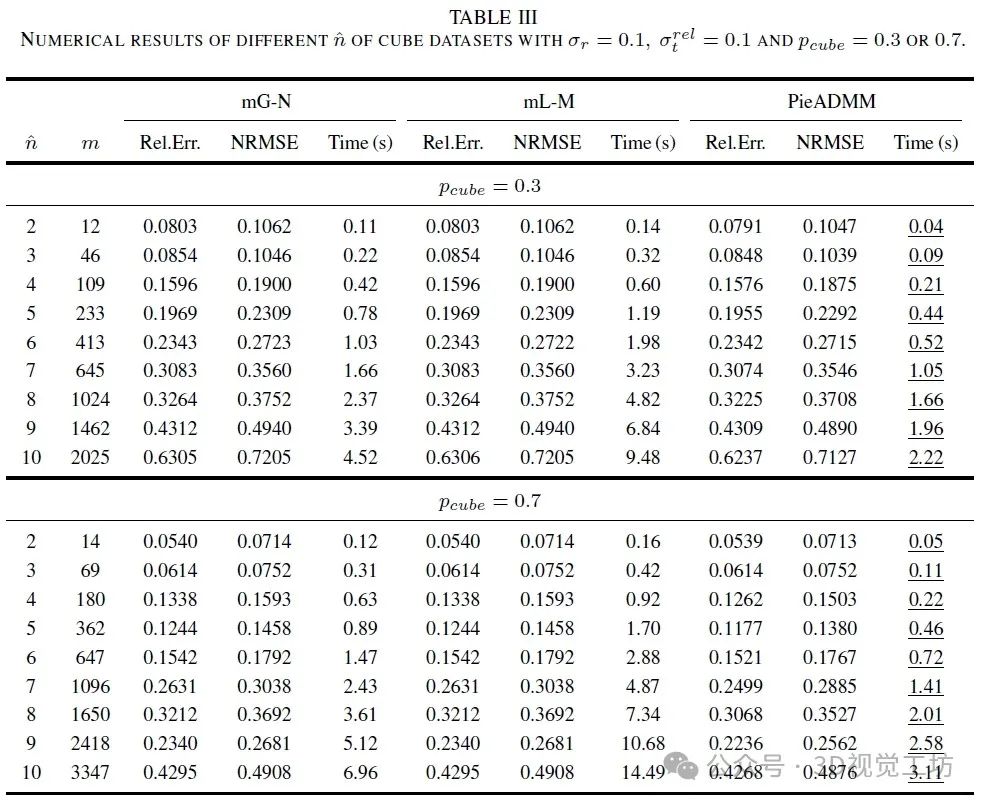
我們還從2到10選擇?n,并在表III中展示了數(shù)值結(jié)果。圖7a顯示了立方體數(shù)據(jù)集的邊緣和頂點(diǎn)數(shù)量之間的關(guān)系,圖7b和7c說(shuō)明了速度隨著?n的增加而上升的趨勢(shì)。mG-N和mL-M的成本增長(zhǎng)都是立方的,而PieADMM的增長(zhǎng)速度較慢。
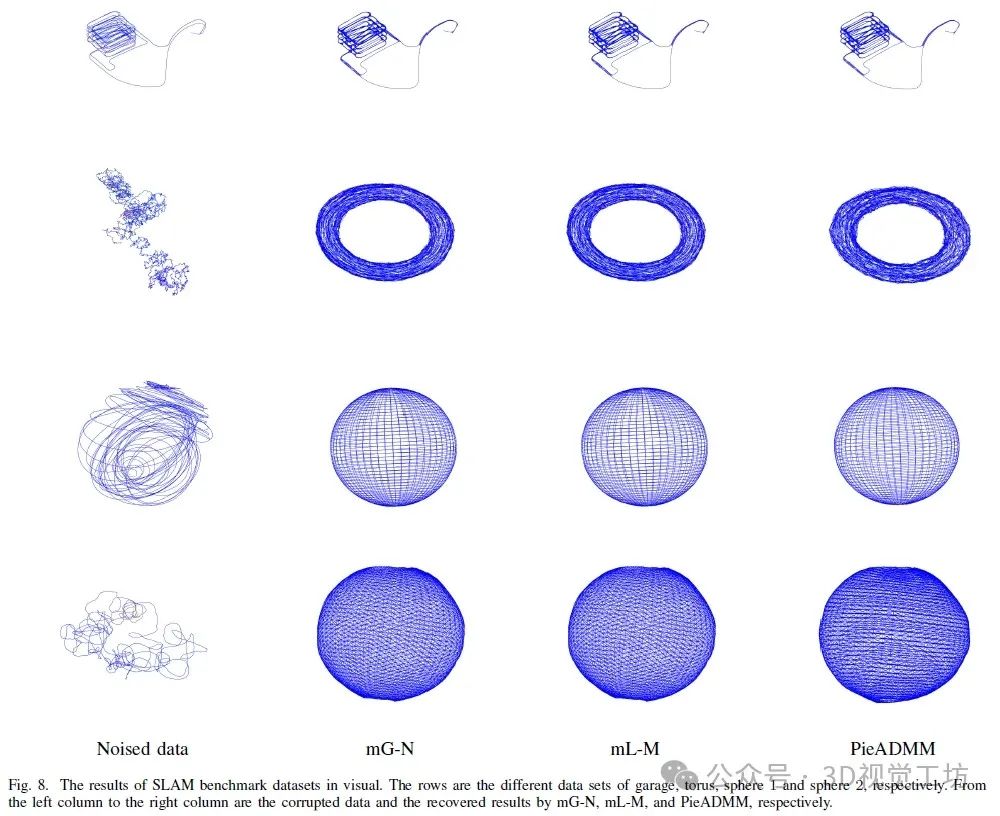
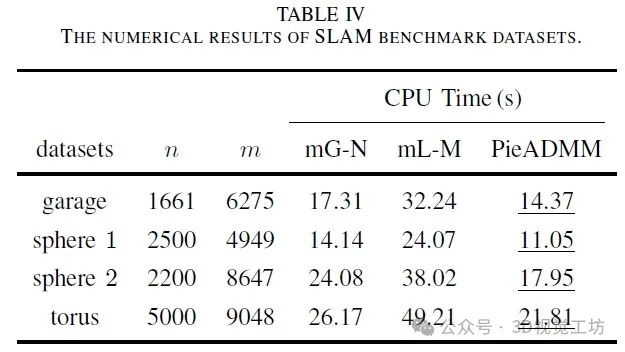
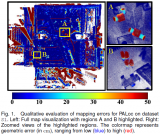
我們測(cè)試了一些流行的3D SLAM數(shù)據(jù)集。車(chē)庫(kù)數(shù)據(jù)集是一個(gè)大規(guī)模的真實(shí)世界示例,另外三個(gè)(球1、球2和環(huán)面)是用來(lái)比較性能的常見(jiàn)數(shù)據(jù)集。與球1數(shù)據(jù)集不同,球2數(shù)據(jù)集添加了更大的噪聲。我們還使用弦初始化技術(shù)為所有方法計(jì)算了一個(gè)初始點(diǎn)。圖8顯示了軌跡的視覺(jué)結(jié)果,相應(yīng)的數(shù)值結(jié)果列在表IV中。值得注意的是,我們的旋轉(zhuǎn)模型是基于vMF分布而不是傳統(tǒng)的高斯分布,因此恢復(fù)的解不相同,并且比較目標(biāo)函數(shù)值或梯度是沒(méi)有意義的。我們?cè)诒碇酗@示了CPU時(shí)間,表明PieADMM收斂速度比mG-N和mL-M快。
7. 總結(jié)
在SLAM中的位姿圖優(yōu)化是一種特殊的非凸優(yōu)化,其中變量通常位于se(3)中,具有非線性目標(biāo)函數(shù),或在具有正交約束的特殊歐幾里得群中。復(fù)雜的模型使得找到全局解變得困難。本文提出了一種基于增強(qiáng)單位四元數(shù)和馮米塞斯-費(fèi)舍爾分布的新非凸位姿圖優(yōu)化模型,這是一個(gè)在單位球面上的大規(guī)模四次多項(xiàng)式優(yōu)化。通過(guò)引入輔助變量,我們將其重新表述為多二次多項(xiàng)式優(yōu)化、多線性最小二乘問(wèn)題。然后,我們引入了一個(gè)針對(duì)PGO模型的近端線性化黎曼ADMM,其中子問(wèn)題是簡(jiǎn)單的投影問(wèn)題,并且可以根據(jù)有向圖的結(jié)構(gòu)并行解決,從而大大提高了效率。然后,基于我們PGO模型滿足的Lipschitz梯度連續(xù)性假設(shè)和流形上的一階最優(yōu)性條件,我們建立了找到ε駐點(diǎn)解的迭代復(fù)雜度為O(1/?2)。在兩個(gè)具有不同數(shù)據(jù)規(guī)模和噪聲水平的合成數(shù)據(jù)集以及四個(gè)3D SLAM基準(zhǔn)數(shù)據(jù)集上的數(shù)值實(shí)驗(yàn)驗(yàn)證了我們方法的有效性。
-
算法
+關(guān)注
關(guān)注
23文章
4702瀏覽量
94941 -
SLAM
+關(guān)注
關(guān)注
24文章
436瀏覽量
32375 -
數(shù)據(jù)集
+關(guān)注
關(guān)注
4文章
1223瀏覽量
25317
原文標(biāo)題:超越L-M和G-N!最新圖優(yōu)化框架!全面提升SLAM定位精度!
文章出處:【微信號(hào):3D視覺(jué)工坊,微信公眾號(hào):3D視覺(jué)工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
【「# ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐」閱讀體驗(yàn)】視覺(jué)實(shí)現(xiàn)的基礎(chǔ)算法的應(yīng)用
室內(nèi)智能指路牌的定位精度能達(dá)到多少
UWB高精度定位技術(shù)在智能倉(cāng)儲(chǔ)中的應(yīng)用
廠區(qū)人車(chē)定位用哪個(gè)定位方案好

SSM框架的性能優(yōu)化技巧 SSM框架中RESTful API的實(shí)現(xiàn)
用于SLAM中點(diǎn)云地圖綜合評(píng)估的開(kāi)源框架
直線電機(jī)的精度能達(dá)到多少?和重復(fù)定位精度一樣嗎
利用VLM和MLLMs實(shí)現(xiàn)SLAM語(yǔ)義增強(qiáng)

激光雷達(dá)在SLAM算法中的應(yīng)用綜述

MG-SLAM:融合結(jié)構(gòu)化線特征優(yōu)化高斯SLAM算法

一種半動(dòng)態(tài)環(huán)境中的定位方法

物聯(lián)網(wǎng)系統(tǒng)中高精度RTK定位方案的實(shí)現(xiàn)_高精度定位模塊

基于ST第五代高精度定位芯片的車(chē)載定位P-BOX方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論