") 智駕無圖真的可以實現(xiàn)嗎?
智駕無圖真的可以實現(xiàn)嗎?
自動駕駛技術的快速發(fā)展正加速推動整個汽車行業(yè)向智能化、自動化和網(wǎng)聯(lián)化方向演進,車輛的定位、感知及決策需求也不斷提升,為了實現(xiàn)城市復雜路況下的自動駕駛,精準的定位信息成為汽車實現(xiàn)自動駕駛的基本要求。傳統(tǒng)GPS提供的普通導航定位精度一般在10m~30m,無法滿足自動駕駛系統(tǒng)對厘米級甚至毫米級精度的需求,尤其是在高速行駛或面對復雜交通環(huán)境時,定位誤差可能會直接導致車輛的駕駛決策失誤,帶來安全隱患。
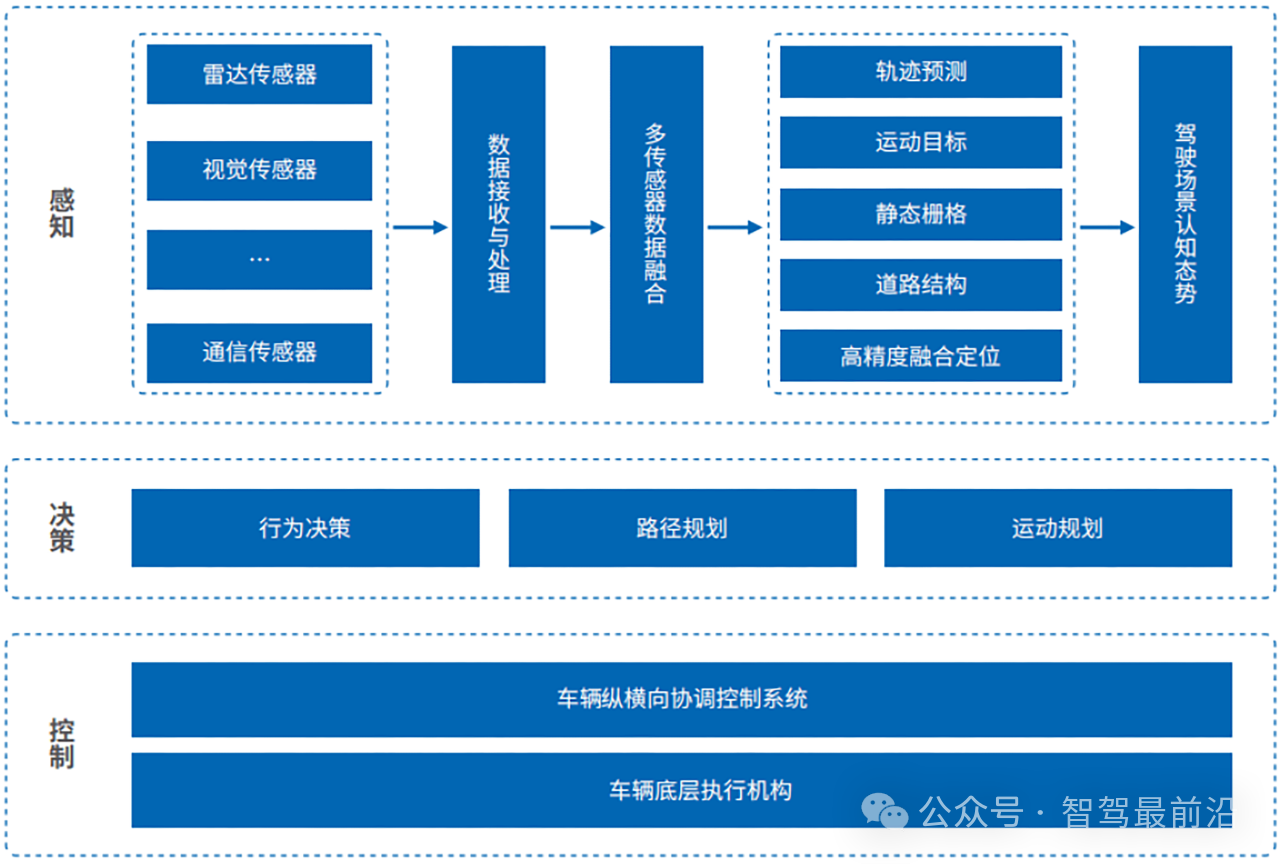
自動駕駛技術架構圖
高精度定位技術的出現(xiàn),為智能駕駛系統(tǒng)解決了“我在哪”的核心問題。通過提供厘米級別的精準定位,高精度定位技術為智能駕駛車輛在復雜的城市交通場景下提供了穩(wěn)定的導航與控制支持,滿足了其對安全性、精確性和實時性的高標準要求。高精度定位技術不僅可以提供基于全球坐標系的絕對位置,還能夠通過實時動態(tài)定位、精密單點定位等技術手段,將定位精度提升至厘米級,極大地減少了因定位誤差帶來的決策偏差。與車載攝像頭、激光雷達等相對定位傳感器不同,高精度定位在提供絕對位置信息方面具備全天候、不間斷的特點,因此可以作為車載傳感器的冗余手段,在傳感器信號失效或環(huán)境感知不穩(wěn)定的情況下,持續(xù)為車輛提供精確的位置信息。高精度定位技術的發(fā)展與普及在很大程度上得益于北斗衛(wèi)星導航系統(tǒng)、5G通信網(wǎng)絡、低軌衛(wèi)星等新興技術的推動。近年來,國內外逐漸興起了以城市NOA(導航輔助駕駛)為代表的L3級別智能駕駛應用場景。相比于高速公路,城市道路的行駛環(huán)境更為復雜,存在著較多的交叉路口、動態(tài)障礙物等問題,對高精度定位技術的需求更大。隨著華為、小鵬等企業(yè)在L3級別智能駕駛技術上的突破,高精度定位逐步成為智能駕駛應用中的重要支撐技術,并在政策支持和市場需求的雙重推動下快速增長。即便在進入2024年后,越來越多車企提出了輕地圖,甚至無圖方案,但高精度地圖在智能駕駛中的實際應用依然很多,高精度地圖依然是眾多車企實現(xiàn)自動駕駛必不可少的一項技術。
城市導航輔助駕駛與高精度定位的發(fā)展
1.1 城市NOA發(fā)展現(xiàn)狀
城市導航輔助駕駛(NOA)作為L3級別智能駕駛技術的重要應用方向,是近年來自動駕駛領域的關鍵突破之一。與高速公路上的自動駕駛不同,城市NOA需要車輛在具有復雜交通環(huán)境的城市道路中實現(xiàn)自動駕駛功能。2023年,國內多家知名車企,如華為、小鵬等,紛紛推出了具備城市NOA功能的智能駕駛車型,推動了高精度定位技術的進一步發(fā)展。根據(jù)市場調研數(shù)據(jù)顯示,2022年搭載NOA功能的車型數(shù)量約為26萬輛,到2023年迅速增長至95萬輛,并預計2024年將達到150萬輛以上,這意味著在短短兩年間NOA車型年均增長率將達到300%以上。
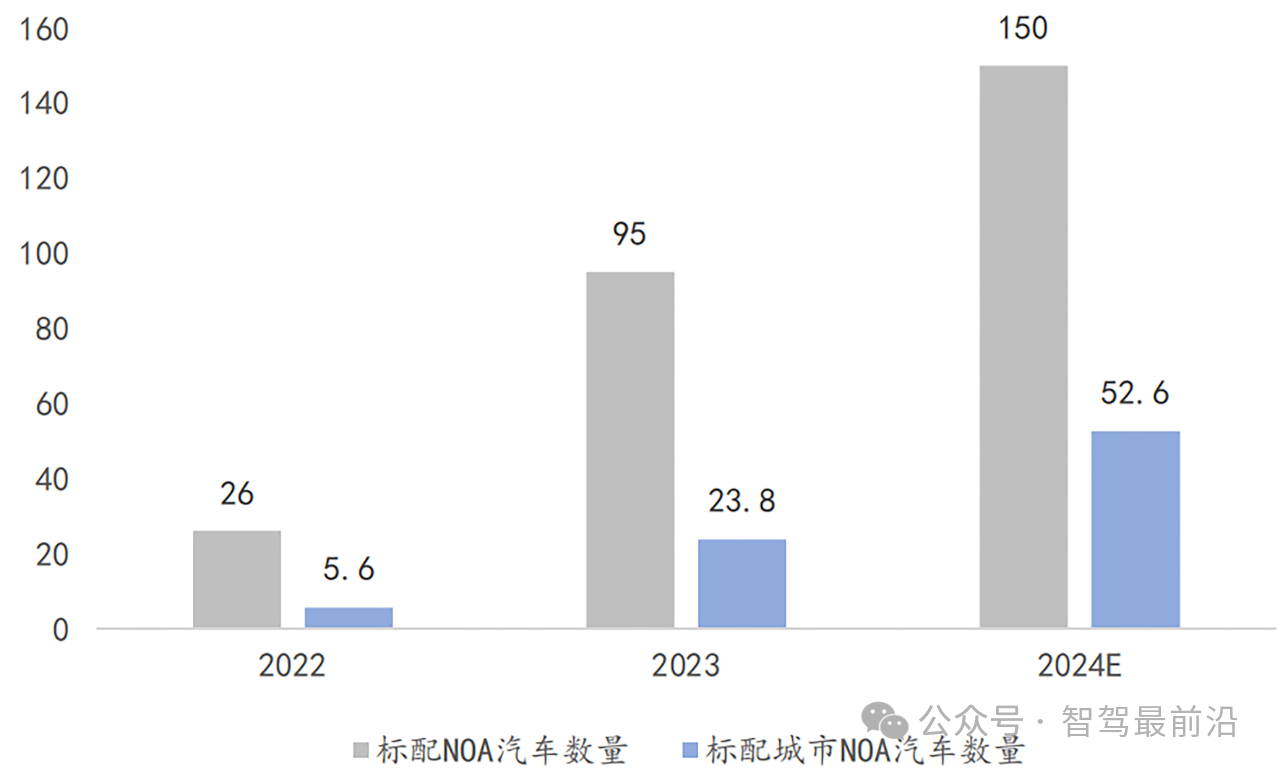
標配NOA/城市NOA功能汽車數(shù)量(萬輛)

各大品牌高精度定位技術的車型
這種顯著的增長趨勢表明,市場對高精度定位技術的需求極為旺盛,同時也反映出智能駕駛在中國城市交通中的重要性逐漸提升。城市道路的復雜性,例如頻繁的路口、動態(tài)障礙物以及多樣化的道路特征等,使得高精度定位系統(tǒng)在城市NOA的應用場景中愈發(fā)不可或缺。不同于高速公路上簡單的路線和較少的交通變量,城市道路要求車輛具備精確的路徑跟蹤、動態(tài)避障和實時決策能力,這些都對高精度定位提出了極高的要求。智能駕駛在復雜的城市交通中應用,需要車輛實現(xiàn)對路徑規(guī)劃和環(huán)境感知的精確控制,因此定位精度和定位穩(wěn)定性成為了影響城市NOA落地的重要因素。高精度定位在城市場景中的廣泛應用不僅能滿足車輛對厘米級別的精確定位需求,還能在車載傳感器不穩(wěn)定、信號遮擋等情況下提供穩(wěn)定的定位服務,進一步保障智能駕駛系統(tǒng)的行駛安全和穩(wěn)定性。未來,隨著更多車企加入城市NOA的推廣行列,高精度定位技術的需求預計將持續(xù)增長,從而推動智能駕駛和高精度定位技術的發(fā)展實現(xiàn)雙贏。
1.2 高精度定位的技術路徑
高精度定位技術路徑的多樣化,是應對城市道路復雜性和精確性需求的必然趨勢。傳統(tǒng)的GPS定位系統(tǒng),由于受到大氣誤差、設備誤差以及衛(wèi)星軌跡誤差等因素的影響,其定位誤差較大,無法滿足智能駕駛系統(tǒng)的高精度需求。為了達到厘米級的定位精度,RTK(實時動態(tài)定位)、PPP(精密單點定位)和PPP-RTK等多種高精度定位方案被廣泛應用到智能駕駛場景中。RTK定位技術是一種利用基準站和流動站之間的差分信息進行定位的方案,具有較高的實時性和精度。在RTK系統(tǒng)中,通過接收和解析基準站發(fā)送的誤差修正信息,流動站可以將定位精度提高至厘米級。然而,RTK技術的應用受到基準站布設密度和信號覆蓋范圍的限制,適合于相對固定、基站密度較高的場景。PPP(精密單點定位)技術則通過提供精確的衛(wèi)星軌道數(shù)據(jù),使接收器能夠實現(xiàn)無需基站支持的高精度定位。與RTK技術相比,PPP定位精度高且適用范圍廣,適合跨區(qū)域應用,但需要較長的收斂時間,且實時性較差。近年來,PPP-RTK技術結合了RTK和PPP的優(yōu)勢,通過全球基站網(wǎng)絡和區(qū)域性基站的協(xié)同合作,在實現(xiàn)厘米級定位精度的同時,提供了更廣泛的信號覆蓋范圍和更強的實時性 。在城市NOA應用中,PPP-RTK已成為主流的定位技術路徑。PPP-RTK不僅彌補了RTK在城市場景中的信號覆蓋不足,還通過區(qū)域性基站有效消除了衛(wèi)星軌道和信號傳輸過程中的誤差,為城市智能駕駛系統(tǒng)提供了穩(wěn)定可靠的厘米級定位支持。此外,低軌衛(wèi)星技術的發(fā)展也為PPP-RTK技術的廣域覆蓋和信號增強提供了有力支持。未來,隨著北斗系統(tǒng)和5G通信網(wǎng)絡的完善,PPP-RTK技術將在智能駕駛領域發(fā)揮更大的作用,為高精度定位的規(guī)模化應用創(chuàng)造條件。
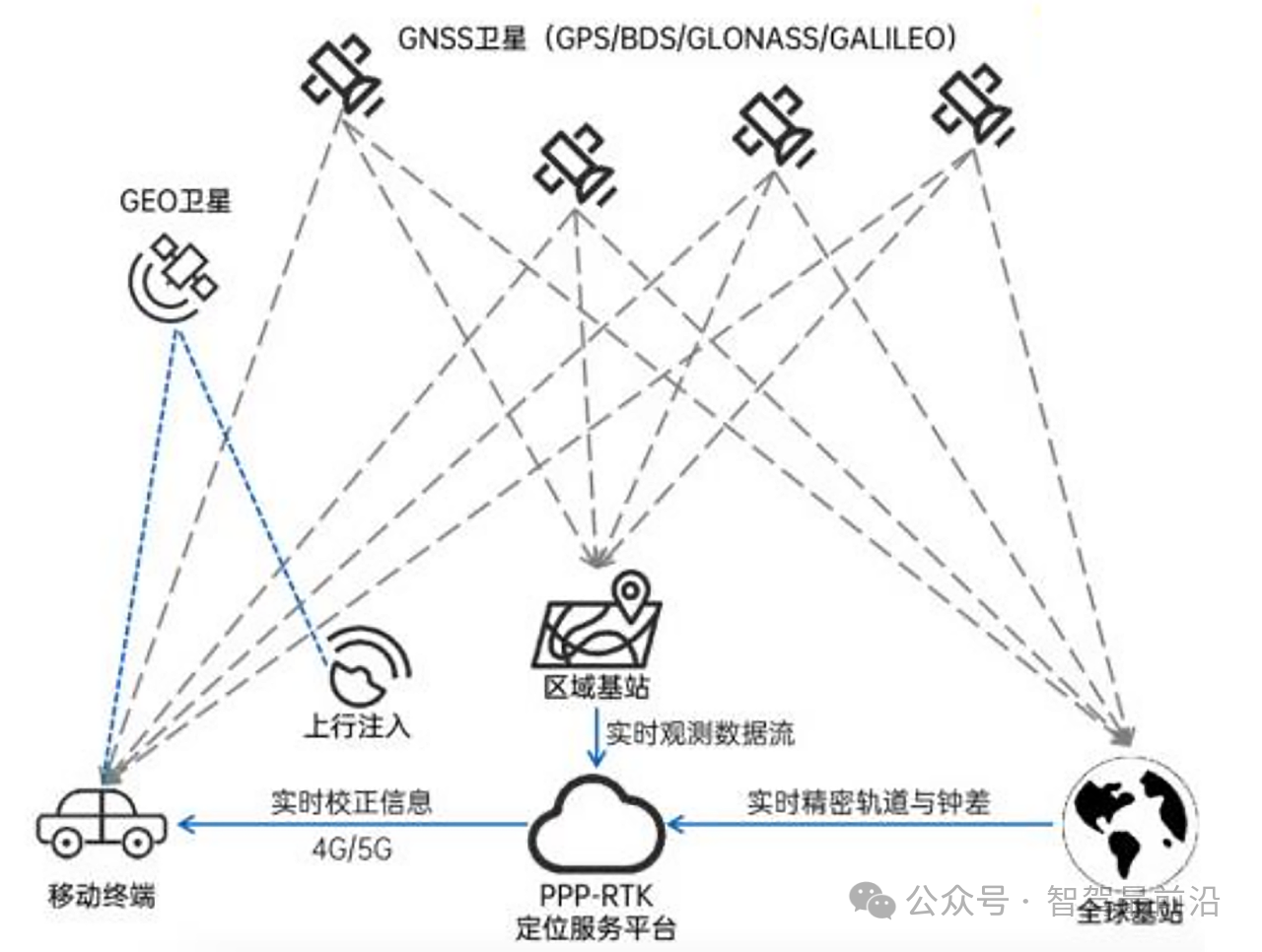
PPP-RTK 技術示意圖
有圖與無圖模式下的高精度定位應用
2.1 有圖模式與無圖模式的技術對比
在智能駕駛的高精度定位應用中,有圖模式和無圖模式是兩種主要的技術實現(xiàn)路徑。兩者的技術差異顯著,各自適用于不同的道路場景和應用需求。有圖模式是指智能駕駛系統(tǒng)依賴高精度地圖來實現(xiàn)車輛定位、路徑規(guī)劃和駕駛決策。這種模式通常使用高精度地圖作為主導數(shù)據(jù)源,將道路環(huán)境的細節(jié)信息(如車道線、交通標志等)預先存儲到地圖數(shù)據(jù)庫中,車輛在行駛過程中利用高精度地圖進行路線規(guī)劃和環(huán)境識別。在有圖模式下,高精度地圖中的詳細數(shù)據(jù)可以幫助車輛準確識別車道位置、路標信息和道路邊界,從而在駕駛決策時提供精確的路徑指引和控制策略。相較于無圖模式,有圖模式在環(huán)境相對穩(wěn)定的高速公路和快速路等結構化道路上表現(xiàn)尤為優(yōu)越。然而,這種模式對地圖實時更新要求較高,一旦地圖數(shù)據(jù)出現(xiàn)偏差或滯后,可能會導致車輛決策失誤。此外,高精度地圖的存儲和實時更新需要占用大量的計算資源和存儲空間,這在一定程度上限制了有圖模式的推廣。

高精度地圖車道示意圖
與之相比,無圖模式是一種依賴車載傳感器(如激光雷達、攝像頭等)進行環(huán)境實時感知和駕駛決策的模式。無圖模式不依賴高精度地圖,而是通過激光雷達、攝像頭等傳感器實時獲取車輛周圍的環(huán)境數(shù)據(jù),利用計算算法和感知技術進行障礙物檢測、道路識別和導航?jīng)Q策。無圖模式的優(yōu)勢在于能夠快速應對道路上的突發(fā)變化,并適用于交通頻繁變動的城市道路環(huán)境。無圖模式的缺點是,車輛在感知算法和計算力方面的依賴性較高,系統(tǒng)對數(shù)據(jù)處理的要求非常嚴格,尤其在復雜道路環(huán)境中更需要強大的算力支撐。此外,由于無圖模式在導航過程中完全依賴車載傳感器,如果遇到遮擋或信號受限的情況,系統(tǒng)可能無法獲取到足夠的信息,從而影響駕駛決策。總體而言,有圖模式和無圖模式各具優(yōu)勢,但隨著智能駕駛的發(fā)展,越來越多的廠商選擇在不同場景中靈活應用兩種模式,以達到最優(yōu)的安全性和可靠性。
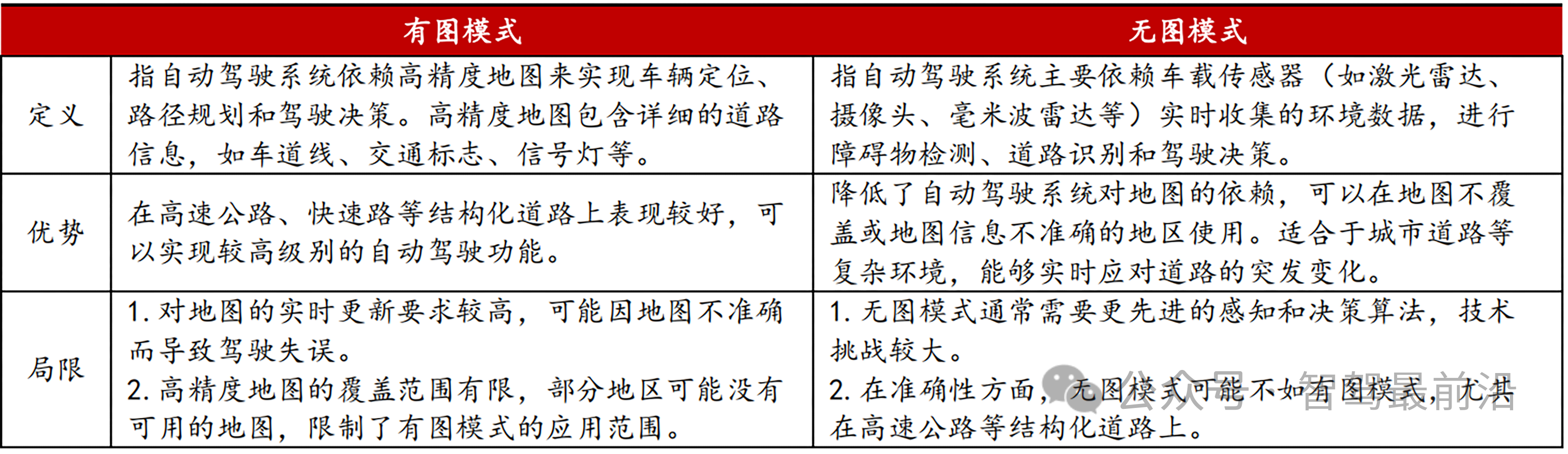
有圖模式與無圖模式對比
2.2 “輕地圖重感知”方案在智能駕駛中的應用
傳統(tǒng)高精度地圖模式雖然在高速公路等結構化道路上表現(xiàn)優(yōu)越,但由于城市道路的動態(tài)特征較多,頻繁更新地圖信息成為技術上的難題,且成本較高。為解決這一問題,業(yè)內逐漸采用了“輕地圖、重感知”的技術方案,以降低智能駕駛系統(tǒng)對高精地圖的依賴,同時實現(xiàn)高精度定位在城市復雜道路中的廣泛應用。輕地圖方案的核心在于減少地圖信息的存儲量和更新頻率,僅保留重要的道路特征信息。
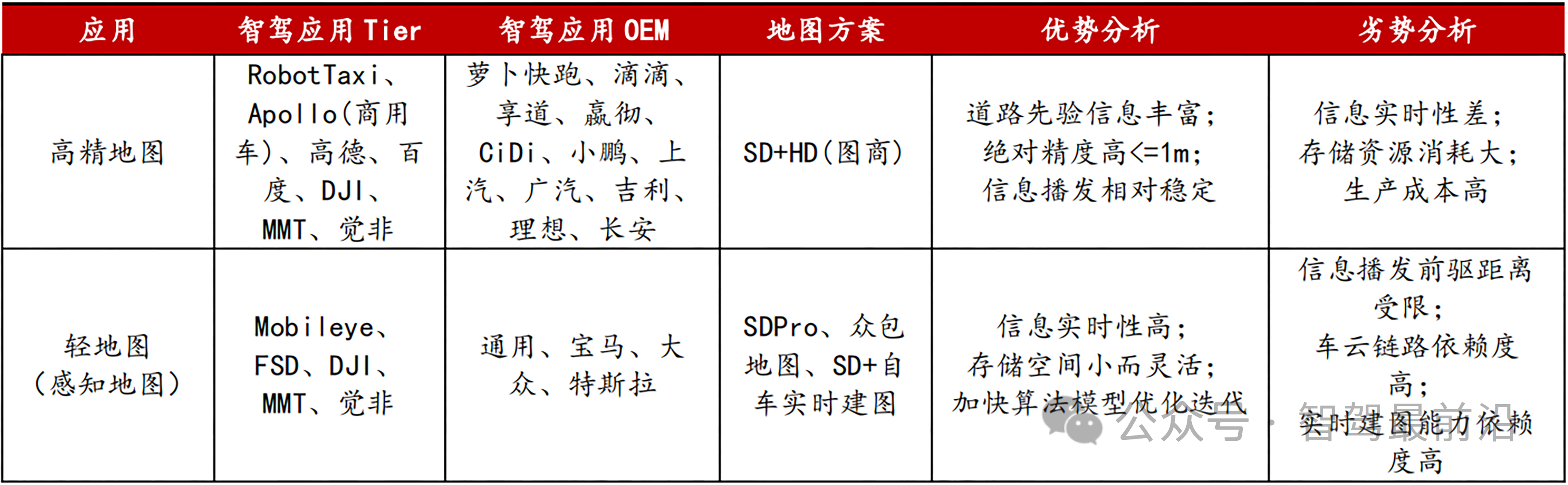
高精地圖與輕地圖對比
在輕地圖方案中,高精度定位技術為車輛提供了重要的絕對位置信息,使車輛在沒有完整的高精度地圖支持的情況下,仍能通過車載傳感器感知周圍環(huán)境,進行實時定位和路徑?jīng)Q策。輕地圖方案有效降低了地圖更新頻率和成本,尤其在城市復雜場景中可以減少系統(tǒng)對云端地圖的依賴,提高了系統(tǒng)的獨立性和反應速度。通過結合高精度定位和實時感知算法,輕地圖模式可以應對復雜的城市環(huán)境變化,為智能駕駛提供高效、可靠的定位和導航支持。在輕地圖重感知的應用場景中,高精度定位為智能駕駛系統(tǒng)的路徑規(guī)劃和決策提供了底層支撐,尤其是在遇到復雜的交通環(huán)境時,通過高精度定位技術與傳感器的多幀融合,可以提高車輛在障礙物識別、路面判斷和環(huán)境感知中的準確性。未來,輕地圖模式的推廣將有助于降低智能駕駛技術的落地成本,增強智能駕駛系統(tǒng)在多樣化環(huán)境中的適應能力,為實現(xiàn)更廣泛的市場應用提供了可能。
高精度定位核心技術方案
3.1 主要技術:RTK、PPP和PPP-RTK的詳細分析
高精度定位技術中的RTK(實時動態(tài)定位)、PPP(精密單點定位)和PPP-RTK(混合定位)是當下智能駕駛領域最為常用的幾種高精度定位技術。這些技術的差異主要體現(xiàn)在使用場景、精度需求以及信號覆蓋范圍等方面。RTK技術是基于載波相位差分的定位技術,通過設置固定的基準站和車載的流動站,實時接收衛(wèi)星信號和基站發(fā)出的差分校正數(shù)據(jù),將定位精度提升至厘米級別。RTK的實時性較強,適用于短距離范圍內的高精度定位。然而,RTK技術的應用在一定程度上受制于基準站的密度分布和信號覆蓋情況。例如,在城市道路中,RTK的性能可能會因為高樓遮擋或基站信號不穩(wěn)定而受到限制。因此,RTK技術更適合應用在基站網(wǎng)絡完善的高速公路等固定路線場景中,而在信號復雜、基站布局不足的城市道路中,RTK的穩(wěn)定性會有所下降。PPP技術則采用精確軌道和鐘差數(shù)據(jù)進行單點定位,無需基站支持,可以實現(xiàn)廣域范圍內的定位,并且具備厘米級精度。PPP的優(yōu)勢在于不需要建立昂貴的基站網(wǎng)絡,適用于需要長時間連續(xù)定位的場景,例如無人機巡航、海洋船只導航等。但PPP技術的不足之處在于其收斂時間較長,通常需要15分鐘甚至更長時間才能達到穩(wěn)定精度,且PPP在實時性方面的表現(xiàn)不如RTK,因此在智能駕駛中的應用相對有限。PPP-RTK是一種將PPP和RTK兩種技術結合的混合定位方案。其優(yōu)勢在于通過全球基站網(wǎng)絡提供的衛(wèi)星軌道數(shù)據(jù)實現(xiàn)廣域覆蓋,再結合區(qū)域基站的差分信號校正誤差,使得車輛可以在城市道路或信號復雜的場景中實現(xiàn)高精度、實時的定位。PPP-RTK不僅解決了RTK受限于信號覆蓋的不足,還通過區(qū)域性基站校正了衛(wèi)星軌道誤差和環(huán)境誤差,從而提供了更加精準且穩(wěn)定的定位服務。未來,隨著低軌衛(wèi)星的普及和北斗系統(tǒng)的完善,PPP-RTK將在智能駕駛和智慧交通等領域中展現(xiàn)更大的應用潛力,成為城市NOA等智能駕駛應用的主要定位方案。
3.2 GNSS+IMU深耦合衛(wèi)慣組合技術的應用
GNSS(全球導航衛(wèi)星系統(tǒng))與IMU(慣性測量單元)深耦合的衛(wèi)慣組合技術是目前車載高精度定位系統(tǒng)中最常用的一種方案,廣泛應用于智能駕駛的定位和導航系統(tǒng)中。GNSS模塊負責提供車輛的絕對位置信息,但在高樓林立的城市區(qū)域,衛(wèi)星信號可能會受到遮擋,從而影響車輛的定位精度。IMU模塊則通過加速度傳感器和陀螺儀等元件測量車輛的加速度和角速度,實現(xiàn)高頻率的位置和姿態(tài)更新,即便在GNSS信號不穩(wěn)定或暫時丟失的情況下,IMU也可以提供短期內的位置信息補償,從而實現(xiàn)無縫的導航體驗。
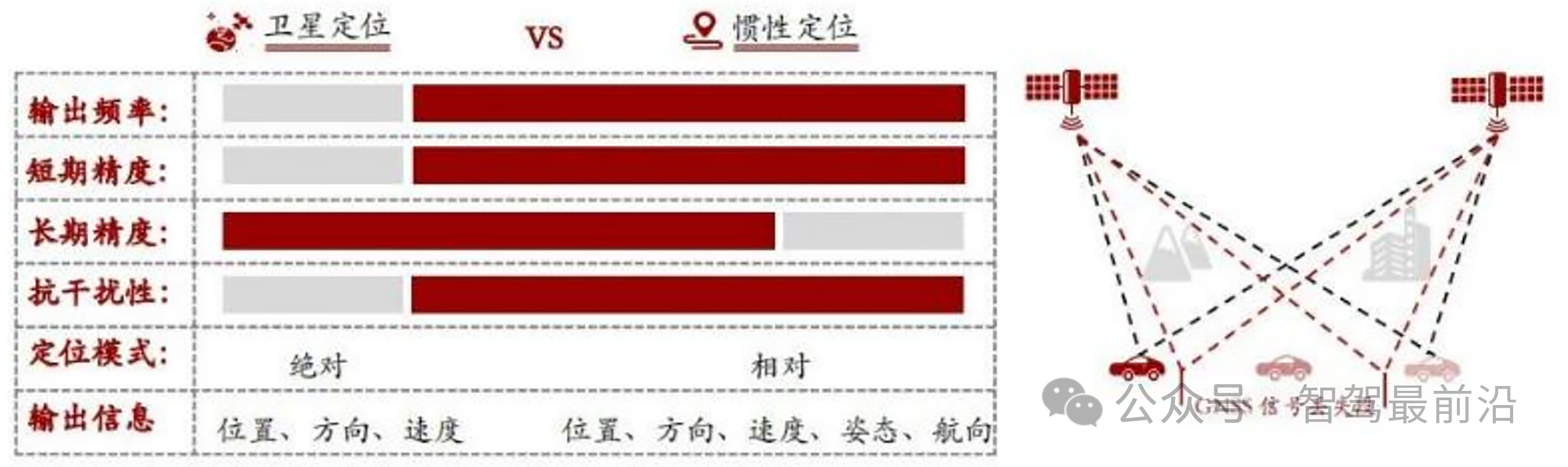
衛(wèi)慣組合導航形成安全冗余
GNSS和IMU的深度耦合是通過多層次數(shù)據(jù)融合實現(xiàn)的。簡單的組合導航方案可以分為松耦合和緊耦合,而深耦合技術則是將GNSS信號處理和IMU數(shù)據(jù)采集高度集成,使其在復雜城市環(huán)境中也能夠保持高精度的定位效果。在智能駕駛中,深耦合衛(wèi)慣組合系統(tǒng)可以有效提高系統(tǒng)在信號波動、遮擋等不利環(huán)境中的適應性。例如,當車輛在隧道、高架橋下方或多層停車場等信號遮擋較多的場景中行駛時,深耦合系統(tǒng)通過IMU提供的慣性導航信息,可以確保車輛的定位數(shù)據(jù)保持連續(xù)性,從而避免因定位失準導致的駕駛失誤。衛(wèi)慣組合系統(tǒng)的另一優(yōu)勢在于,它能夠對傳感器數(shù)據(jù)進行融合,通過多源信息的冗余設計,為智能駕駛系統(tǒng)提供更高的定位精度和數(shù)據(jù)可靠性。未來,隨著深耦合算法的進一步優(yōu)化和硬件性能的提升,衛(wèi)慣組合技術將在高階智能駕駛應用中進一步擴大其市場應用,為智能駕駛提供更安全可靠的導航支撐。
高精度定位的產業(yè)格局及主要企業(yè)
4.1 高精度定位產業(yè)鏈的結構及核心環(huán)節(jié)
高精度定位產業(yè)鏈包含了從上游的元器件供應、中游的系統(tǒng)方案集成、到下游的應用行業(yè)三個主要環(huán)節(jié)。產業(yè)鏈上游主要由芯片、天線、傳感器等核心元器件供應商構成,提供高精度定位所需的基礎硬件;中游則由系統(tǒng)方案集成商和定位服務提供商組成,這一環(huán)節(jié)是將硬件、軟件和服務進行整合,形成具備廣泛應用能力的高精度定位系統(tǒng)和服務平臺;而下游則涵蓋了智能駕駛、智慧交通、無人系統(tǒng)等多個行業(yè)應用,推動高精度定位技術在實際市場中的規(guī)模化落地。在高精度定位產業(yè)鏈中,元器件供應商如天線和傳感器生產商是技術發(fā)展的重要支撐,尤其是GNSS接收器和IMU傳感器等核心器件的生產水平直接影響了整個定位系統(tǒng)的精度和穩(wěn)定性。中游的系統(tǒng)方案集成商主要負責將硬件與定位算法、數(shù)據(jù)服務相結合,開發(fā)高精度定位解決方案。目前國內外的高精度定位服務提供商多通過云端服務平臺和增強基站網(wǎng)絡,向用戶提供基于訂閱模式的定位服務 。隨著高精度定位需求的增加,中游企業(yè)逐漸向上游和下游延伸產業(yè)鏈條,以實現(xiàn)軟硬件一體化解決方案的開發(fā)和應用。
4.2 代表性企業(yè)及其市場布局
北斗星通:北斗星通是中國高精度定位行業(yè)的龍頭企業(yè)之一,作為國內最早進入高精度導航芯片和GNSS模塊領域的企業(yè)之一,北斗星通在智能駕駛和物聯(lián)網(wǎng)市場中占有重要地位。該公司的高精度導航芯片和定位模組已在汽車前裝市場占據(jù)超過50%的份額,并廣泛應用于智能駕駛領域。北斗星通的核心優(yōu)勢在于其芯片設計能力和定位技術創(chuàng)新,通過與NVIDIA等國際科技公司的合作,北斗星通正在加速高精度定位產品的海外市場布局,推動其定位芯片、數(shù)據(jù)服務在智能駕駛中的廣泛應用。中海達:中海達是一家高精度定位全產業(yè)鏈企業(yè),主要業(yè)務涵蓋了從核心元器件、定位算法到終端應用的全套解決方案。中海達的市場定位不僅局限于高精度定位設備,還覆蓋了自動駕駛、智慧城市等領域,為智能駕駛車輛提供高精度的定位與導航服務。該公司與國內知名車企上汽集團合作開發(fā)了基于北斗的車載高精度定位系統(tǒng),并為多個城市的智慧交通項目提供了高精度定位支持。中海達的多元化市場布局和技術集成能力,極大地提升了其在高精度定位領域的市場競爭力。此外,還有其他國內廠商如海格通信、華測導航等,也在不斷擴展其在高精度定位行業(yè)的業(yè)務領域。海格通信作為特種無線通信設備的領先廠商,正在積極進軍北斗導航產業(yè)鏈,推出了從芯片到整機的多種定位產品。華測導航則通過構建高精度定位芯片平臺和全球星地一體的增強網(wǎng)絡服務,成為了國內高精度定位領域的重要參與者。總體而言,國內高精度定位產業(yè)正處于快速發(fā)展的階段,市場需求的增長和政策的推動將進一步強化行業(yè)龍頭企業(yè)的競爭力。

國內導航設備終端主要企業(yè)部分業(yè)務及產品對比
結論
高精度定位作為智能駕駛系統(tǒng)的核心支撐技術之一,已在近年內實現(xiàn)了從高速公路到城市道路的應用拓展。高精度定位不僅為智能駕駛車輛提供了精確的路徑規(guī)劃和實時決策支撐,也為智慧交通和公共安全等領域提供了重要的數(shù)據(jù)支持。未來,隨著高精度定位技術的不斷發(fā)展,PPP-RTK、GNSS+IMU等定位技術的優(yōu)化升級,以及5G、低軌衛(wèi)星等新興通信技術的加持,高精度定位將在智慧交通、公共安全、個人智能穿戴等多個領域展現(xiàn)出更廣闊的應用前景。總之,高精度定位技術在政策扶持、市場需求和技術創(chuàng)新的多重推動下,必將成為智慧城市和智能駕駛不可或缺的重要支柱。
審核編輯 黃宇
-
自動駕駛
+關注
關注
788文章
14222瀏覽量
169660 -
自動駕駛技術
+關注
關注
4文章
97瀏覽量
15187 -
高精度定位
+關注
關注
0文章
69瀏覽量
3934
發(fā)布評論請先 登錄
余承東疑再次喊話比亞迪,高階智駕如何界定?
高呼的“全民智駕”真的做到“全民”了嗎?

Momenta用智駕大模型重新定義ETC通行
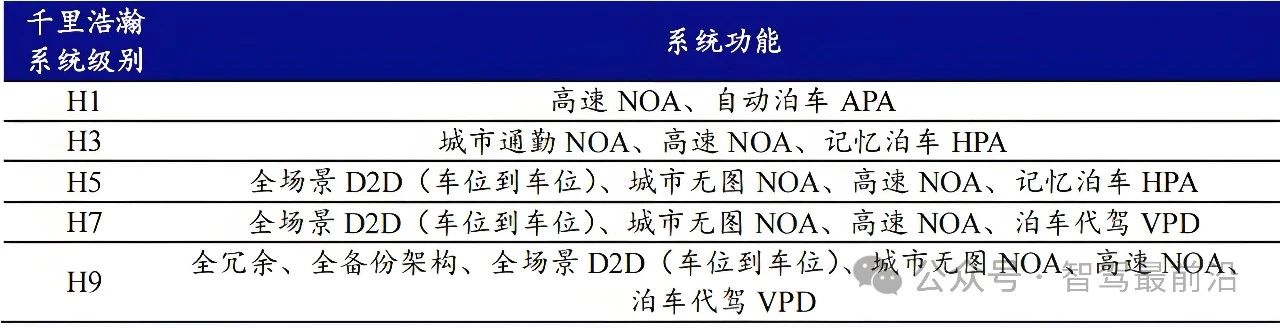
吉利“千里浩瀚”智駕系統(tǒng)如何推動智駕平權?
都在說智駕平權,什么是智駕平權?如何智駕平權?
藍牙賦能車載副駕屏,開啟智能出行新體驗






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論