 中國科大:在機器人觸覺傳感器研究中取得重要進展
中國科大:在機器人觸覺傳感器研究中取得重要進展

11 月 26 日消息,中國科學技術大學工程科學學院、人形機器人研究院董二寶副教授課題組聯合香港城市大學于欣格副教授團隊,于 11 月 15 日在國際期刊《國家科學評論》(National Science Review)上在線發表了題為“A tactile perception method with flexible grating structural color”的研究論文。

該研究工作提出了一種基于柔性光柵結構色的觸覺感知新方法,在觸覺傳感器的觸點定位分辨率和力識別精度等綜合性能上實現了重要突破。
觸覺傳感器是機器人執行復雜精細操作的關鍵核心部件之一。近年來,隨著機器視覺技術的快速發展,基于視覺識別原理的觸覺傳感器(也被稱為視觸覺傳感器)成為觸覺感知領域的重要研究方向。然而,現有的視觸覺傳感器主要依賴幾何光學信息或標記跟蹤技術,其觸點力位識別感知的分辨率和精度受到了嚴重制約。
針對這一難題,研究團隊受仿生結構色現象的啟發,創新性地采用柔性光柵薄膜在白光照射下形成的結構色圖案作為觸覺表征信息,并結合深度學習算法進行數據處理,實現了接觸點的高靈敏、高分辨率感知。
實驗結果表明,這種基于柔性光柵結構色的視觸覺感知方法能夠充分利用結構色圖案中蘊含的豐富觸覺表征信息,在觸點定位的空間分辨率和法向力識別精度方面顯著優于當前的視觸覺感知技術,并在綜合性能上取得了突破性提升。該傳感器的整體法向力大小精度為 6 mN,平面分辨率為 79 μm,接觸深度分辨率為 25 μm。
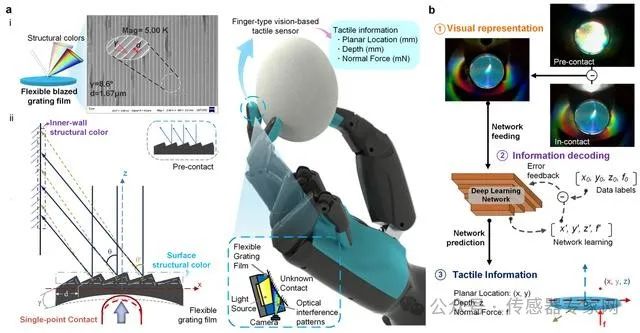
基于柔性光柵結構色的觸覺感知方法示意圖
此外,基于柔性光柵結構色的觸覺感知方法展現了卓越的可拓展適用性。研究團隊基于核心組件的模塊化設計,進一步開發了面向三種典型場景應用的傳感器原型:
一款高靈敏度振動傳感器,能夠精準檢測低頻振動信號;
一款仿生觸須傳感器,能夠靈敏感知低頻振動和氣流擾動;
一套具備環向三維接觸感知能力的內窺鏡觸覺傳感系統。
實驗進一步驗證了該觸覺感知方法在機器人感知、環境監測和醫療器械等領域的廣泛應用潛力。
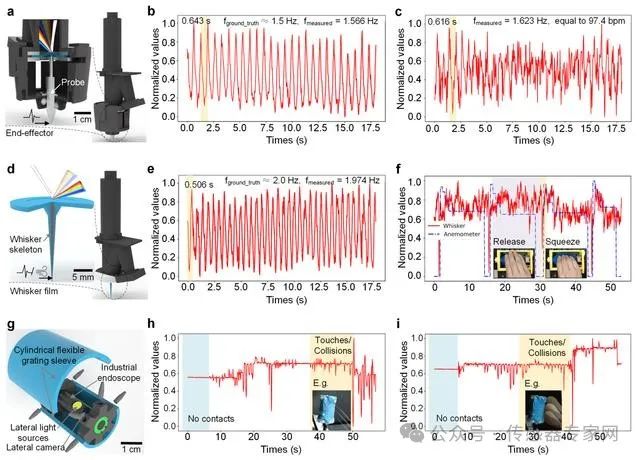
該觸覺感知方法的擴展應用原型示例
來源:IT之家
聲明:轉載此文是出于傳遞更多信息之目的,若有來源標注措誤或侵犯了您的合法權益,請與我們聯系,我們將及時更正、刪除,謝謝。
-
機器人
+關注
關注
213文章
29829瀏覽量
213537 -
人形機器人
+關注
關注
7文章
750瀏覽量
17669 -
觸覺傳感器
+關注
關注
4文章
105瀏覽量
9754
發布評論請先 登錄
0.01°微小變化精準捕捉,機器人姿態傳感器革新

安森美圖像傳感器在機器人技術中的作用
漢威科技柔性觸覺傳感器:為人形機器人裝上“中國觸覺”

清華大學:軟體機器人柔性傳感技術最新研究進展

【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
【「具身智能機器人系統」閱讀體驗】+數據在具身人工智能中的價值
【「具身智能機器人系統」閱讀體驗】+初品的體驗
這批中國企業,在做人形機器人觸覺傳感器
一文講透人形機器人常用的四類感知傳感器:視覺、力/力矩、觸覺、IMU






 工商網監
工商網監
評論