 ETHERCAT轉CANOPEN連接支持ethercat總線的PLC
ETHERCAT轉CANOPEN連接支持ethercat總線的PLC

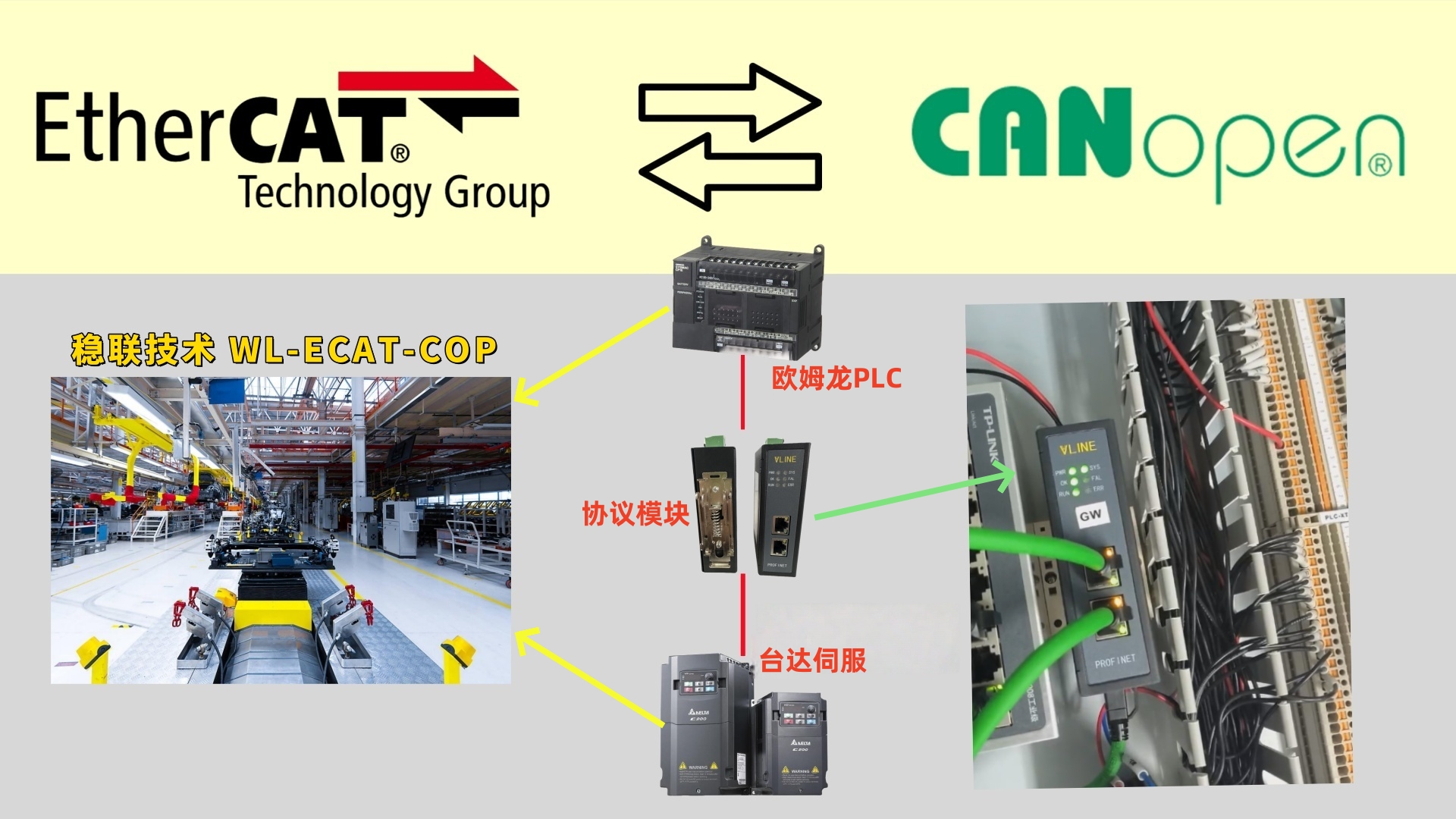
在工業自動化領域,不同廠家的設備常常采用不同的通信協議。ETHERCAT作為一種高性能的工業以太網協議,以其高速、高精度的同步特性,在運動控制領域廣泛應用,安川的 ETHERCAT總線伺服系統便是其中的典型代表,其在機器人、自動化生產線等場景中能夠實現精確的運動控制和快速的響應。而 CANOPEN是一種基于 CAN總線的應用層協議,在工業自動化中也有大量的設備支持,如一些傳感器、執行器、小型控制器等,它具有良好的開放性、可靠性和實時性,適用于分布式控制系統中的設備間通信。
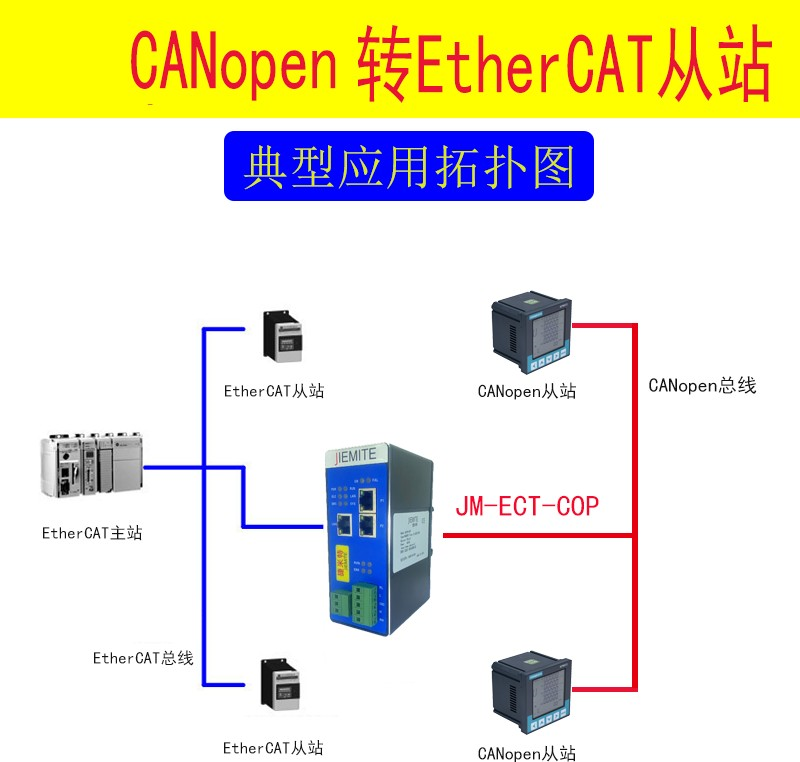
ETHERCAT和CANOPEN不通訊?捷米JM-ECT-COP告訴你不是問題!作為生產管理系統的關鍵部分,數據互聯互通至關重要。然而,由于ETHERCAT和CANOPEN是兩個不同的協議,它們之間的通訊一直是個大問題。這時,捷米JM-ECT-COP閃亮登場!

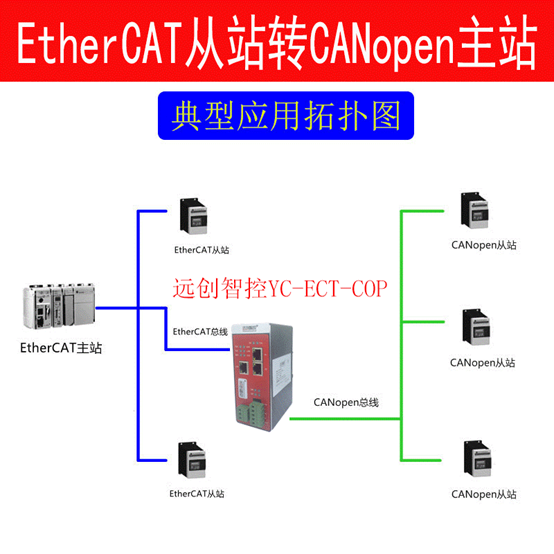
捷米JM-ECT-COP是一款自主研發的通訊網關,可以將ETHERCAT網絡和CANOPEN網絡連接起來,實現兩個協議之間的互聯互通。作為ETHERCAT從站,它可以連接到ETHERCAT總線中,而作為CANOPEN主站,它則可以連接到CANOPEN總線中。這樣一來,數據通訊再也不是問題了!捷米JM-ECT-COP的出現,無疑是生產管理系統的一大福音!為生產管理系統的數據通訊提供了有力的保障。相信未來,這款通訊網關會在越來越多的生產領域發揮出其重要作用。以下是配置方法供大家參考。
配置網關 ETHERCAT 輸入輸出長度
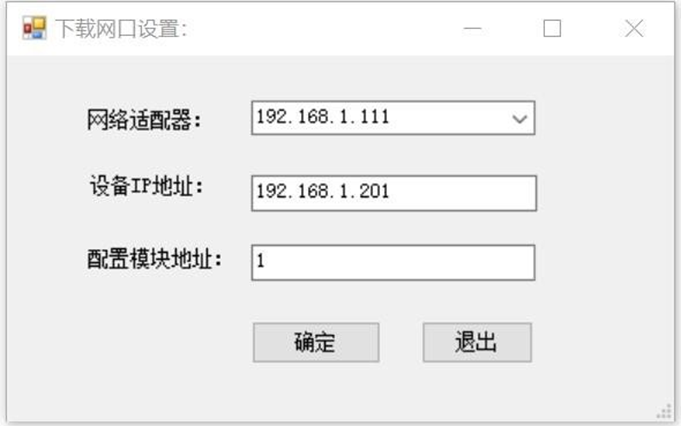
2,打開GW Modbus Builder軟件,設置軟件使用的IP地址
3, EtherCAT配置”。
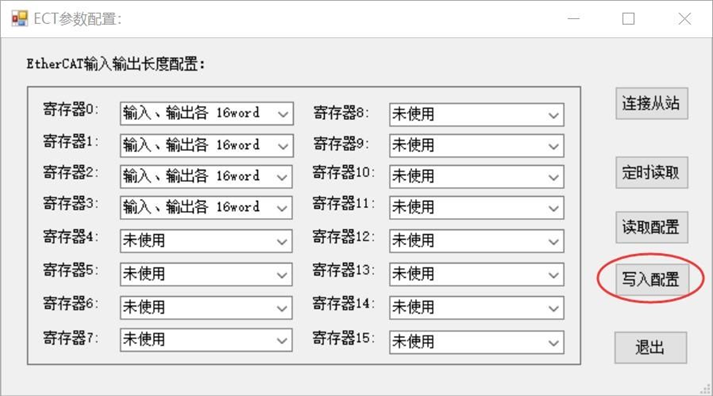
4,點擊“連接從站”按鈕,連接成功后其他按鈕會變成可以點擊的狀態:

5,點擊“讀取配置”按鈕后,顯示網關目前的實際數據長度配置:填寫用戶需要的輸入、輸出數據長度,點擊“寫入配置”按鈕:
6,設置完畢后,網關撥碼的第8位撥到OFF,然后重新給網關供電。
配置網關的ETHERCAT從站
7,將網關xml文件拷貝到主站相應路徑下:
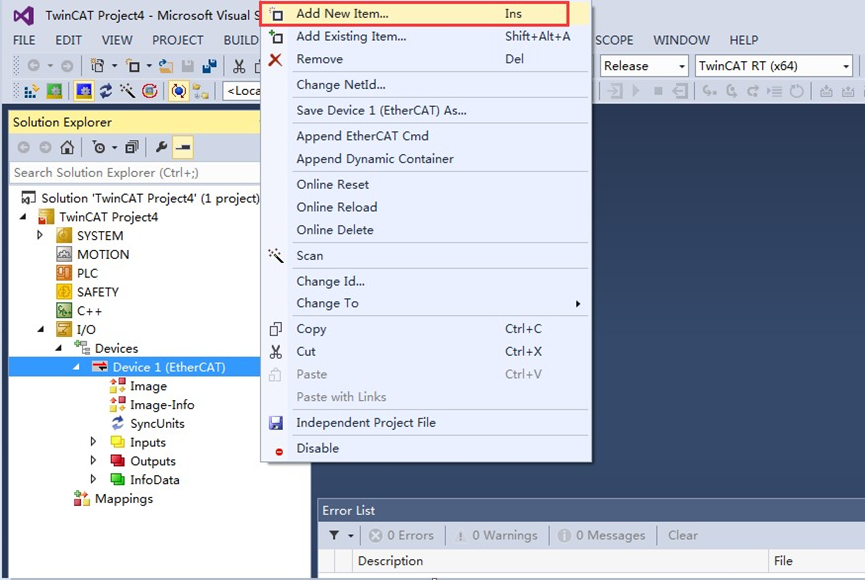
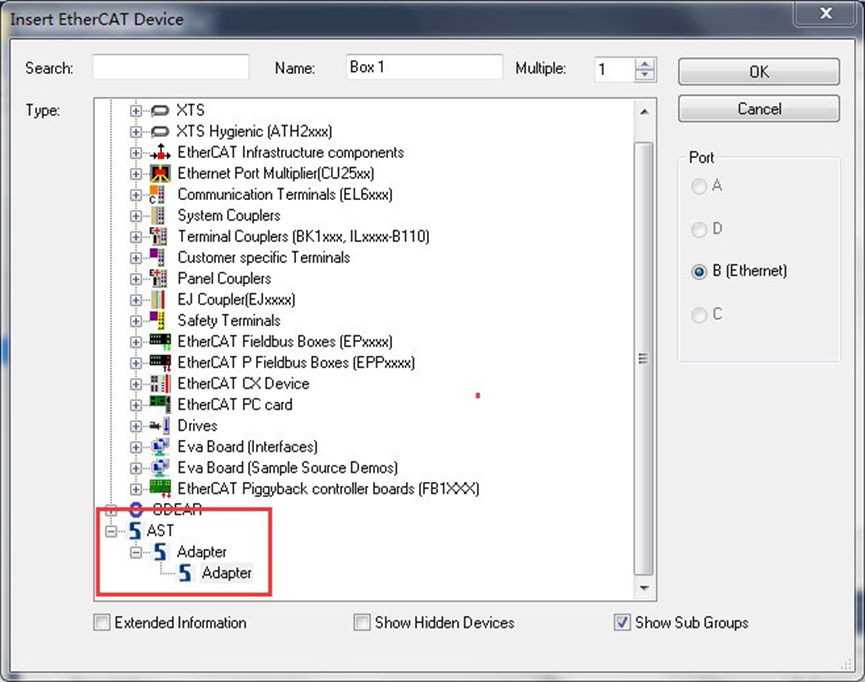
8,添加主站,添加ETHERCAT從站,選擇網關設備,如下圖所示。
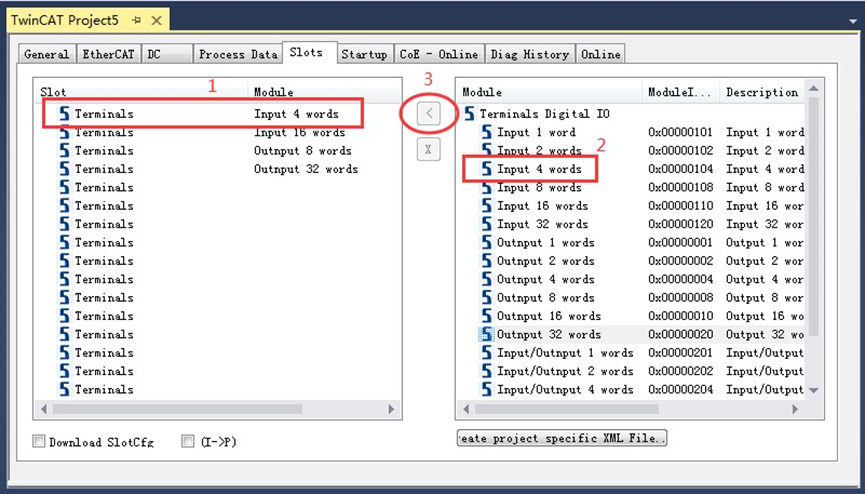
9,配置輸入輸出數據的頁面。如下圖所示,在Slot列表中,一共可以添加10, 條配置信息。右側Module列表的每一條配置選項,都可以添加到Slot中。按照下圖1、2、3的操作順序,可以將Module添加到Slot中。
配置 CANOPEN主站
導入 EDS文件
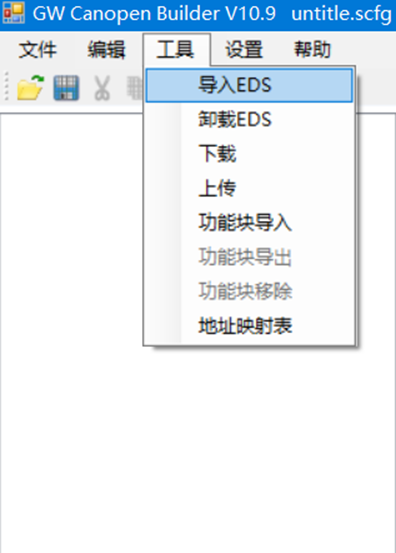
11,打開GW_Canopen_Builder_V10.9.exe軟件,點擊“工具——導入EDS”按鈕。
添加 CANOPEN站點
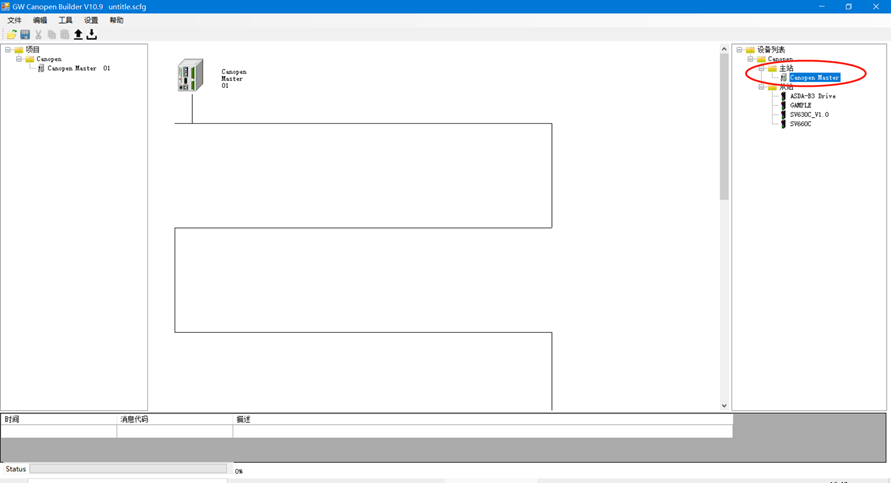
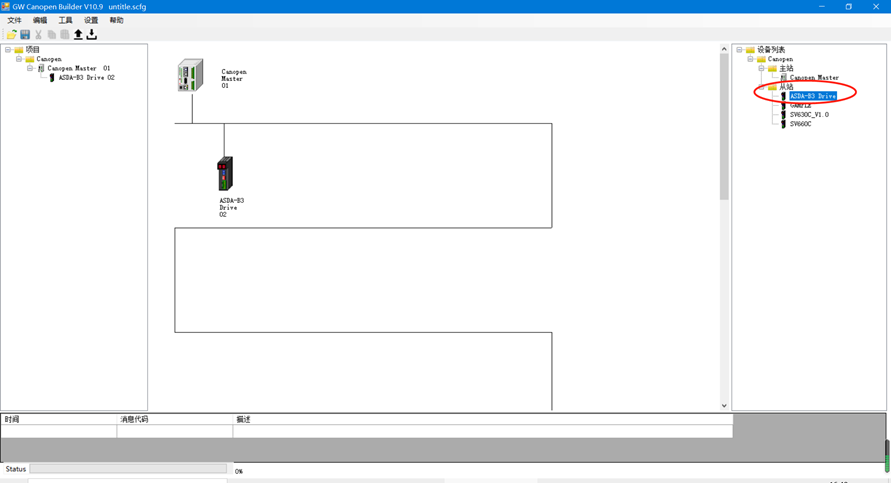
12,添加的CANOPEN從站在右側位置。
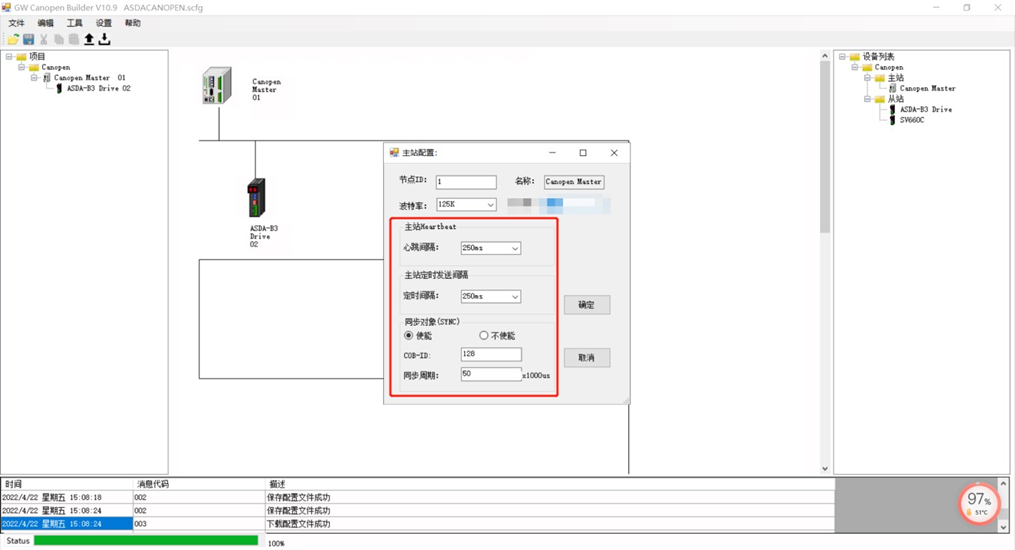
13,右鍵單擊主站圖標,選擇屬性頁面,設置主站波特率、定時發送間隔和主站心跳時間,如下圖:(注意:如使用同步對象SYNC命令則需要使能SYNC,連接多臺CANopen從站時,必須使能該功能)
配置 PDO根據需求選擇需要映射的參數,以添加6040“控制字”、6060“運行模式”為例,選擇添加上 6040或6060

配置 SDO
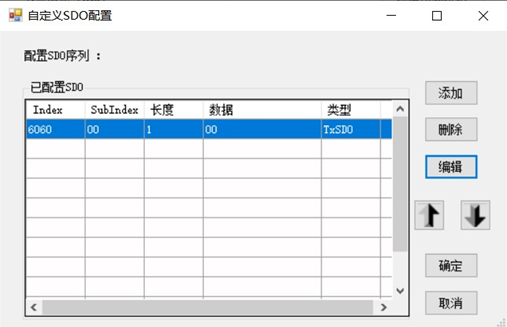
14,通過“SDO配置”,添加SDO,點添加按鈕,添加SDO。
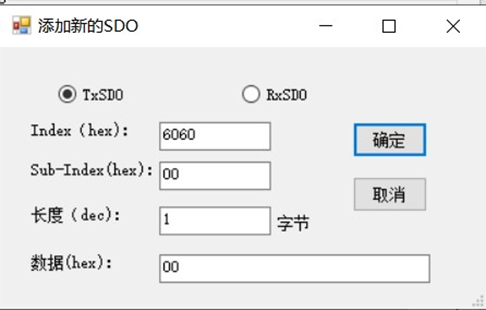
15, 選擇TXSDO按鈕,輸入索引、子索引、數據長度。輸入完畢后點確定。 添加完成后如下圖所示:
下載配置
16,將電腦設置成 192.168.1.10。點擊菜單欄“設置”—“以太網設置”,選擇電腦的IP。
17,啟動PDO通訊
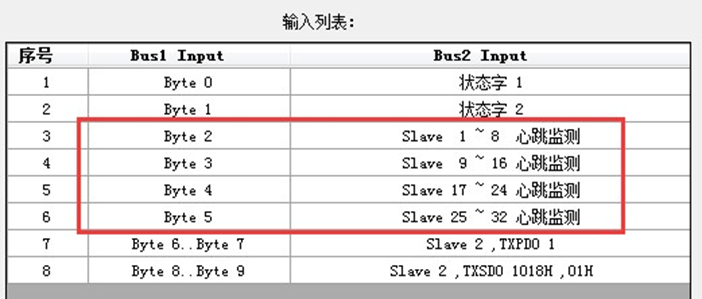
18,網關自動為從站添加32個bit 的在線監測,監控從站的心跳狀態。 從站心跳在線時,顯示1。從站心跳離線時,顯示0。
捷米JM-ECT-COP實現了ETHERCAT設備與CANOPEN設備之間的數據交互與共享。安川ETHERCAT總線伺服的運行狀態數據可以通過網關傳輸給 CANOPEN設備,為其提供決策依據;而CANOPEN設備采集的數據也能反饋給伺服,實現更精準的控制。這種數據共享機制有助于優化生產流程,提高產品質量,為企業的生產管理提供了更全面的信息支持。
審核編輯 黃宇
-
plc
+關注
關注
5032文章
13878瀏覽量
473771 -
物聯網
+關注
關注
2930文章
46156瀏覽量
391159 -
CANopen
+關注
關注
8文章
389瀏覽量
44759 -
ethercat
+關注
關注
19文章
1087瀏覽量
39913
發布評論請先 登錄

多設備聯動,canopen轉Ethercat網關設備接入國產 PLC 控制系統方案落地

協議大和解:ETHERCAT轉CANopen網關配置

當PLC遇上電焊機器人:EtherCAT轉CANopen上演工業級“語言翻譯官”
汽車生產中的測試臺連接 – EtherCAT 轉CANopen高效的網關通信
EtherCAT轉CANopen配置CANopen側的PDO映射

EtherCAT轉CANOPEN配置秘籍!匯川PLC快速上手
EtherCAT轉CANOPEN:技術突破與未來展望!
奇妙聯動!EtherCAT轉CANopen網關與傳感器開啟宇宙導航

CANopen轉EtherCAT網關連接伺服驅動

CANopen轉EtherCAT網關連接伺服驅動

EtherCAT從站轉CANopen主站協議網關(JM-ECT-COP)
EtherCAT從站轉CANopen主站總線協議轉換網關
CANopen轉EtherCAT協議轉化網關功能與配置步驟





 工商網監
工商網監
評論