 上新?|?HPM6E80高壓伺服EtherCAT驅動器方案
上新?|?HPM6E80高壓伺服EtherCAT驅動器方案
求遠電子基于先楫半導體HPM6E80推出的HPM6E00_EtherCAT_MDR高壓伺服EtherCAT從站驅動器方案,提供完善的軟硬件參考,可極大的降低產品開發難度,縮短產品上市時間。
HPM6E00_EtherCAT_MDR
高壓伺服EtherCAT從站驅動器
總線型伺服驅動器是一種用于控制伺服電機的設備,它通過總線通信協議(如CANopen、EtherCAT等)與上位機或控制系統相連,實現高效、精準的數據傳輸與控制指令下達,能同時控制多個伺服電機協同工作,在自動化生產線、數控機床、機器人等領域應用廣泛,具備高速響應、高精度定位、靈活組網等優點。HPM6E00_EtherCAT_MDR是求遠電子基于HPM6E80精心推出的一套高壓伺服EtherCAT從站驅動器方案。依托EtherCAT通信技術,作為從站與主站進行高效的數據交互,接收主站下達的各類控制指令,像位置控制指令、速度調節指令以及力矩設定指令等。在高壓環境下,其憑借出色的性能,精準驅動高壓伺服電機運轉,確保電機在高電壓工況下依然能實現穩定且精確的位置控制、速度跟隨以及力矩輸出,為眾多對精度和動力要求較高的工業應用場景,比如大型數控機床、重型自動化生產線等,提供可靠的動力支持與精準的控制保障。該控制器具有兩端口的EtherCAT從站輸入輸出,支持EtherCAT CIA402協議,支持多種編碼器、通訊接口及控制接口。該方案完成度高,用戶可快速評估功能,極大地降低產品開發難度,縮短產品上市時間。

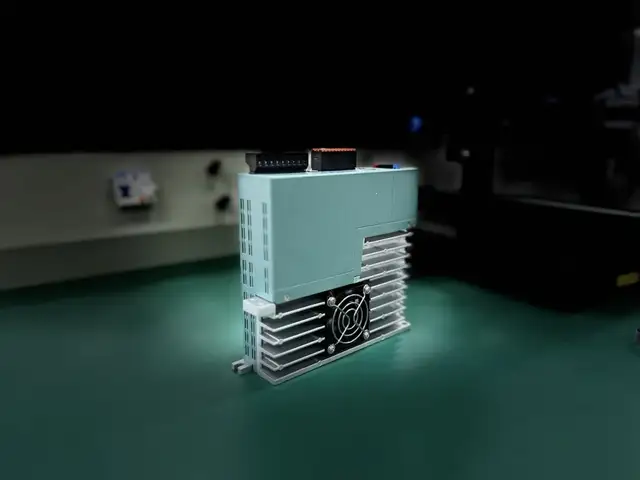
圖1 整機圖
驅動器特點:
輸入:AC 200-240V 4.0A 50/60Hz
輸出:AC 0-240V 2.8A 0-500Hz 400W
支持兩端口的的EtherCAT從站輸入輸出
支持EtherCAT CIA402協議
支持支持多摩川絕對值編碼器以及增量式編碼器
支持兩路隔離CANFD、兩路隔離RS-485、兩路RS-232
支持8路隔離DI、8路隔離DO
內帶調試器,可直接通過外部USB口進行軟件調試、下載及串口通信
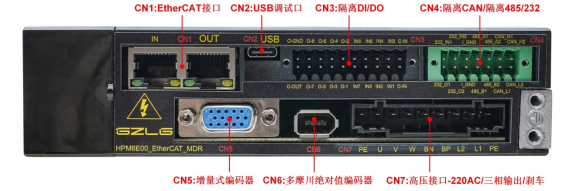
接口說明圖
整體控制流程:
在本方案中,伺服電機采用了先進的FOC三環控制方式,這其中涵蓋了極為關鍵的電流環、速度環以及位置環。通過這三環的協同配合,使得電機可以達成對位置、速度以及力矩的精確控制,從而在各種應用場景中都展現出卓越的性能。與此同時,本方案借助三路sigma-Delta ADC來采集三相電流,它能夠以高精度、高頻率的方式捕捉電流數據,為后續的控制調節提供可靠依據。而且,還運用編碼器來采集位置信息,并將其作為反饋內容,通過這樣的反饋機制,電機可以實時根據實際情況進行調整,進而真正實現精確的位置控制,讓整個系統運行得更加穩定、高效且精準。
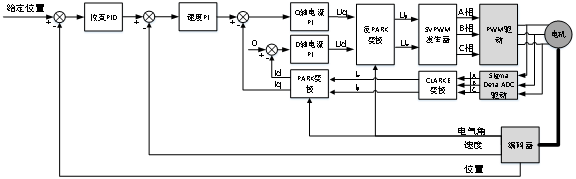
控制流程
HPM6E00系列處理器介紹
HPM6E00系列MCU是上海先楫推出的一款高性能、高實時以太互聯,雙RISC-V內核的微控制器。HPM6E00系列提供多達4端口千兆以太交換機,支持時間敏感網絡(TSN: Time-Sensitive Networking),并且支持EtherCAT從站控制器(ESC:EtherCAT Slave Controller),以及32路高分辨率PWM輸出,Σ?數字濾波,高精度運動控制系統,可以在工業自動化領域實現基于高實時性低延時以太網的高性能伺服電機控制、機器人運動控制等應用。
處理器優勢特點:
高性能雙核RISC-V處理器,主頻高達600MHz;
片內最大支持2MB SRAM;
支持4端口千兆以太網交換機,且支持TSN協議;
支持3端口的EtherCAT從站控制器;
支持4個高分辨率PWM模塊(32通道),調制精度高達100ps;
支持4個編碼器接口,支持脈沖式與絕對值式位置傳感器,2個旋變解碼器;
支持運動管理控制器、坐標變換器和環路計算器以及可編程邏輯模塊PLB;
支持4個高性能ADC,16位/2MSPS(或12位/4MSPS),最大32路模擬輸入引腳;
支持2個Σ?數字濾波SDM;
支持8路CANFD等眾多通訊接口。
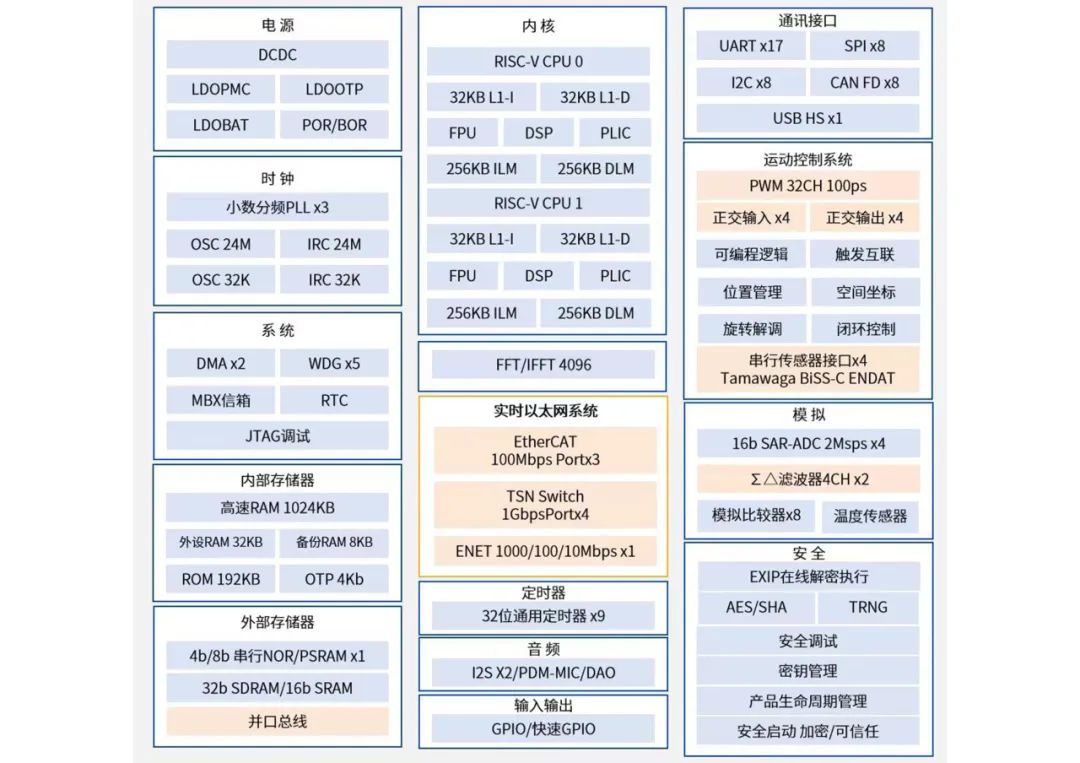
HPM6E00芯片資源框圖
-
驅動器
+關注
關注
54文章
8646瀏覽量
149306 -
ethercat
+關注
關注
19文章
1054瀏覽量
39723 -
先楫半導體
+關注
關注
10文章
250瀏覽量
2617
發布評論請先 登錄
EtherCAT主站轉Profinet網關與禾川伺服驅動器X4E快速通訊案例

EtherCAT主站轉Profinet網關接禾川伺服驅動器X5E快速配置案例

【強勢上新】HPM5E00:EtherCAT運動控制MCU,先楫半導體再拓工業總線產品新版圖

【強勢上新】HPM5E00:EtherCAT運動控制MCU,先楫半導體再拓工業總線產品新版圖

hpm6e80 sdram引腳確認
HPM6E80 cherryusb_winusb10例程速度測試
先輯半導體HPM6E00系列產品能用來做EtherCAT的主站嗎
HPM6E80芯片異常
HPM6E80高壓伺服EtherCAT驅動器方案

高效驅動開啟精密控制時代│先楫HPM6E00伺服驅動器方案
伺服驅動器和伺服電機介紹
PMSM上使用快速電流環路、基于EtherCAT的互聯伺服驅動器






 工商網監
工商網監
評論