 國產 ARM 平臺硬核實測!RK3568 賦能人工智能機械臂手部檢測案例演示
國產 ARM 平臺硬核實測!RK3568 賦能人工智能機械臂手部檢測案例演示
一、產品簡介
國產高性能處理器
64 位 4 核低功耗
2.0 GHz超高主頻
1T 超高算力 NPU






二、實驗目的
1、了解MediaPipe開發框架的用途及流程;
2、掌握基于MediaPipe Hands實現手部檢測的方法。

三、實驗原理
MediaPipe
MediaPipe是?款由Google開發并開源的數據流處理機器學習應?開發框架。
MediaPipe是跨平臺的,可以運?在嵌?式平臺,移動設備(iOS和Android),?作站和服務器上,并?持移動端GPU加速。
MediaPipe 的核?框架由 C++ 實現,并提供 Java 以及 Objective C 等語?的?持。
MediaPipe 的主要概念包括:
數據包(Packet)
數據流(Stream)
計算單元(Calculator)
圖(Graph)
?圖(Subgraph)
MediaPipe特點
(1)端到端加速:內置的快速ML推理和處理即使在普通硬件上也能加速。
(2)?次構建,隨時隨地部署:統?解決?案適?于Android、iOS、桌?/云、web和物聯?。
(3)即?解決?案:展?框架全部功能的尖端ML解決?案。
(4)免費開源:Apache2.0下的框架和解決?案,完全可擴展和定制。
MediaPipe Hands
MediaPipe Hands是?款?保真的?和?指跟蹤解決?案。
它利?機器學習(ML)從?幀中推斷出21個?的3D坐標。該模型學習?致的內部?姿勢表?,甚?對部分可?的?和?我遮擋也具有魯棒性。
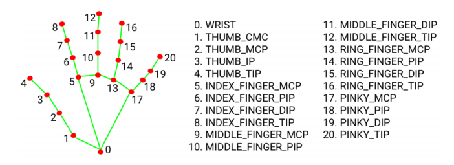
為了獲得地?真實數據,?了21個3D坐標?動注釋了約30K幅真實世界的圖像(從圖像深度圖中獲取Z值,如果每個對應坐標都有Z值)。
四、實驗設備
實驗軟件
本實驗中使用的軟件為.VMware17+Ubuntu18.04.4 和串口調試工具Xshell。

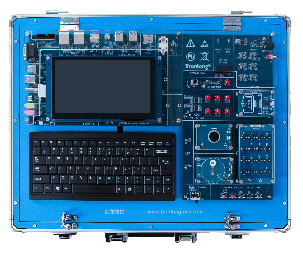
實驗硬件
本實驗中使用的是TL3568-PlusTEB實驗箱,所需的配件為Micro SD卡、Type-C線、電源和網線。

五、實驗步驟
硬件連接
(1)將Ubuntu系統啟動卡插至Micro SD卡槽。
(2)使用Type-C線連接USB TO UART2調試串口到PC機。
(3)將實驗箱ETH0 RGMII網口(COM21)通過網線連接至路由器。
(4)連接實驗箱電源,先不要上電。
(5)將USB攝像頭連接到實驗箱的USB2.0 HOST。
軟件操作
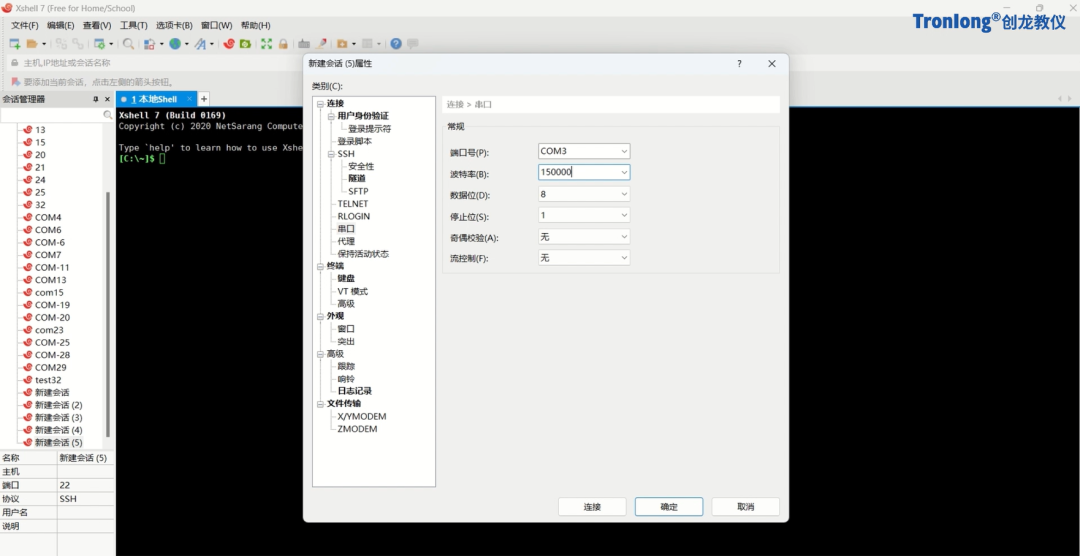
(1)先在設備管理器查看串口的端口號;
(2)再設置串口調試工具,波特率設置為1500000,點擊連接,在Xshell調試終端會顯示連接成功。
(3)連接成功后,撥動實驗箱的電源開關,將實驗箱上電。
(4)系統啟動成功后,輸入賬戶密碼登錄即可(賬密均為:tronlong)
(5)登錄成功后,查詢實驗箱的網口地址。
拷貝文件
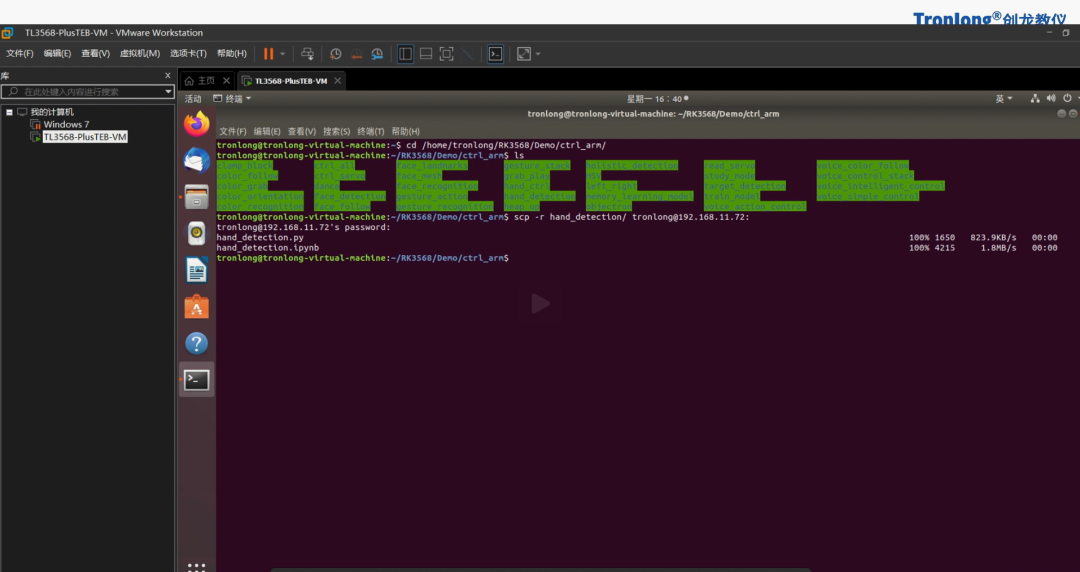
我們先打開Ubuntu,將Demo文件夾拷貝到RK3568目錄下。
"Ctrl+Alt+T"打開控制臺,執行命令將文件拷貝至實驗箱文件系統(根據實驗箱實際IP地址修改命令)。
運行程序
在串口調試窗口執行命令,啟動開發環境
在網頁輸入地址,即可打開登錄界面 (根據實際IP地址修改網頁地址)。
輸入密碼:tronlong,登錄。
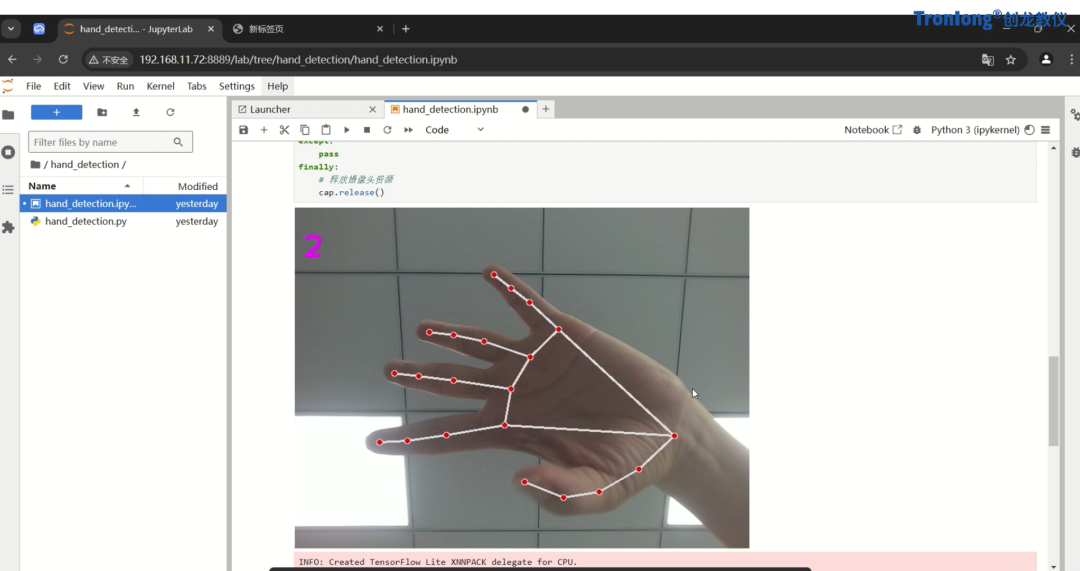
在程序目錄,雙擊打開程序,點擊重新運行程序。
等待右上角的進度餅圖變白,程序運行完成。
在程序最下方,會顯示運行結果。
實時顯示攝像頭采集的圖像信息。對采集的圖像進??掌檢測。

-
ARM
+關注
關注
134文章
9321瀏覽量
375439 -
檢測
+關注
關注
5文章
4613瀏覽量
92573 -
人工智能
+關注
關注
1804文章
48788瀏覽量
246962 -
機械臂
+關注
關注
13文章
547瀏覽量
25252
發布評論請先 登錄
瑞迅科技RK3568主板賦能健康檢測一體機創新應用

紫光同創Logos2+RK3568開發板|國產器件強強聯合開啟嵌入式開發新篇章
深度解析!RK3568 加持機械臂是如何實現顏色識別與抓取的?

RK3568國產實驗箱+人工智能機械臂:跳舞、疊羅漢、夾方塊、積木搬運案例全解!

OpenHarmony4.1藍牙芯片如何適配?觸覺智能RK3568主板SBC3568演示
學習入門_畢設_項目迅為RK3568開發板就夠了

迅為RK3568郵票孔小板ARM3568J核心板瑞芯微人工智能AI鴻蒙Linux安卓
國產RK3568J基于FSPI的ARM+FPGA通信方案分享
RK3568J“麒麟”+“翼輝”國產系統正式發布,“鴻蒙”也正在路上!
米爾創新設計RK3568全LGA國產核心板,更緊湊可靠省連接器成本
Android案例分享,基于瑞芯微RK3568國產平臺!





 工商網監
工商網監
評論