 deepin 23+樹莓派讓小車動起來
deepin 23+樹莓派讓小車動起來

deepin 23 +樹莓派還有啥新玩法?
前言
繼我們之前發布的樹莓派運行 deepin 23 系統教程后,此次我們將深入探索如何借助樹莓派實現與硬件的交互,進而精準控制小車的運行。
硬件準備
以下是所需的硬件清單,看看自己都備齊了嗎?
樹莓派 4b
TB6612FNG 電機驅動模塊
安裝環境
系統:deepin 23
配置 Python 環境
sudo apt install python3-pip python3-venv python-dev-is-python3 python3 -m venv venv source venv/bin/activate pip3 install bottle rpi.gpio
安裝 gpio 服務
sudo apt install pigpiod sudo systemctl enable pigpiod sudo systemctl start pigpiod
硬件安裝
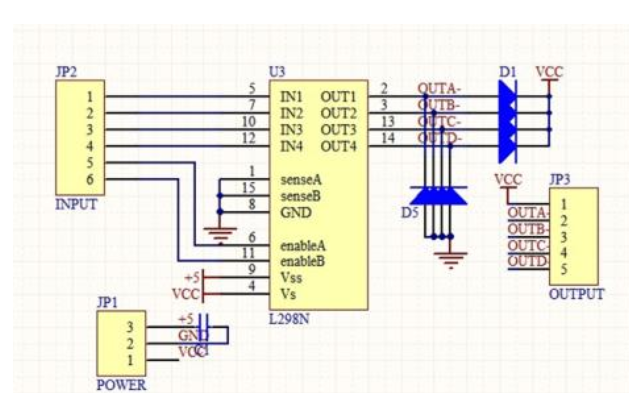
參考圖如下:
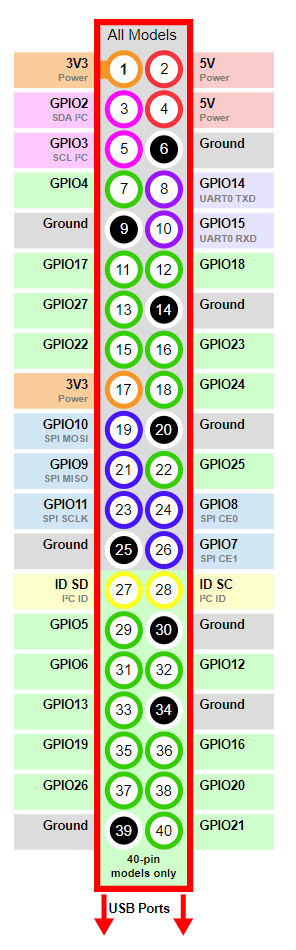
| TB6612 | 樹莓派 | 電機 | 說明 |
| PWMA | 18 | A 電機控制信號輸入 | |
| AIN2 | 27 | A 電機輸入端 2 | |
| AIN1 | 17 | A 電機輸入端 1 | |
| STBY | +3.3V | 驅動器的總開關,STBY 高電平時工作,低電平時停止。 | |
| BIN1 | 22 | B 電機輸入端 1 | |
| BIN2 | 23 | B 電機輸入端 2 | |
| PWMB | 19 | B 電機控制信號輸入 | |
| GND | Power 接入外部電源負極 | ||
| VM | Power(電機驅動電壓輸入端,從外部電源正極輸入) | ||
| VCC | +5V | Power(邏輯電平輸入端,從樹莓派接入5V) | |
| GND | GND | Power 接入樹莓派 GND | |
| AO1 | A 電機輸出端 1 | 電極朝外,左輪下方電極。 | |
| AO2 | A 電機輸出端 2 | 電極朝外,左輪上方電極。 | |
| BO2 | B 電機輸出端 2 | 電極朝外,右輪上方電極。 | |
| BO1 | B 電機輸出端 1 | 電極朝外,右輪下方電極。 |
這里使用 Type-C 接口可充電的 5V 鋰電池給樹莓派供電,電機驅動模塊使用電池盒放入 2 節 5 號電池供電。
運行程序
克隆源碼
git clone git@github.com:chenchongbiao/Raspberry-Car.git
調用 gpio 需用 root 權限。這里直接切 root 用戶運行程序。
sudo su source venv/bin/activate python3 Start.py
運行成功后,通過瀏覽器輸入 http://ip:8088
這里的 ip 為樹莓派的ip 地址。可以通過點擊網頁上的按鈕操控樹莓派小車。
參考資料
原作者項目:https://github.com/valieo/Raspberry-Car
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
硬件
+關注
關注
11文章
3491瀏覽量
67605 -
小車
+關注
關注
0文章
55瀏覽量
21327 -
樹莓派
+關注
關注
122文章
2031瀏覽量
107652
原文標題:deepin 23 + 樹莓派 讓小車動起來!
文章出處:【微信號:linux_deepin,微信公眾號:深度操作系統】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
讓PMSM簡單的動起來的話,需要調用哪些頭文件?
讓PMSM簡單的動起來的話,需要調用那些頭文件,最好解釋下作用。手頭有控制器,但代碼太多是在看不明白。先謝過各位大佬了
發表于 04-26 07:34
請問怎么使無刷電機動起來,就單單動起來
本人是51單片機學習者,剛剛接觸無刷電機,但是連怎么讓它動起來都搞不明白,各位可以分享一下嗎?不勝感激啊,我現在就想讓它動起來先而已
發表于 04-24 00:55
【NanoPi M2申請】創客神器NanoPi M2各類系統以及控制GPIO端口評測
申請理由:本人是一本科畢業生研究樹莓派時間有小一年了,相關的各類系統幾乎玩了一遍,身邊同學也有些人被帶動起來,近期發現nanopi已經支持deepin系統了,我電腦裝的是
發表于 04-08 14:37
【Landzo C1試用體驗】+第二篇 :動起來,生活才更精彩!
經過不懈努力,終于完善了組裝,現在可以上機器人小車動起來了,動起來,才有美感家成就感。下面上圖,本來要上傳視頻的,但是不怎么到怎么弄,要先傳到優酷,在鏈接網址好像。下次有空再搞視頻上傳。在這里說兩個
發表于 06-02 18:55
如何讓智能小車動起來?怎樣去編寫其程序?
如何讓智能小車動起來?怎樣去編寫其程序?怎樣去選擇智能小車的硬件?智能小車的硬件是如何進行連接的?如何從零開始用51單片機去實現智能
發表于 07-14 06:48
使用樹莓派設計智能小車教程之樹莓派手機PC控制小車的實驗免費下載
本文檔的主要內容詳細介紹的是使用樹莓派設計智能小車教程之樹莓派手機PC控制小車的實驗免費下載。
發表于 06-24 08:00
?22次下載

詳細介紹如何從零開始制作51單片機控制的智能小車(一)———讓小車動起來
?? 從本文開始,在之后的一段時間里,我會通過本系列文章,詳細介紹如何從零開始用51單片機去實現智能小車的控制,本文作為本系列的第一篇文章,主要介紹如何讓小車動起來。一、硬件的選擇?
發表于 11-04 14:51
?23次下載

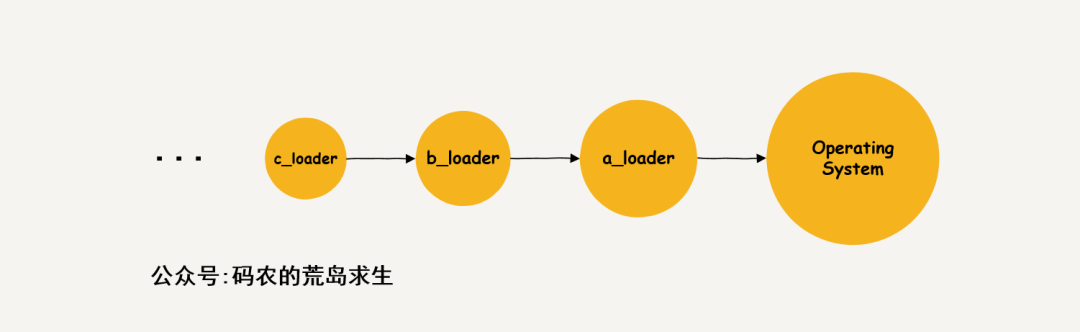
你知道操作系統是如何啟動起來的嗎
操作系統被稱為“第一個程序”,the first programme,原因很簡單,只有當操作系統啟動起來后才能運行我們編寫的程序,那么你有沒有想過這個問題:操作系統是怎樣啟動起來的呢? 實際上這個過程就像發射火箭一樣有趣 ,看完這篇你就明白啦。
BeagleBone AI-64、Servo Cape和讓電機動起來
電子發燒友網站提供《BeagleBone AI-64、Servo Cape和讓電機動起來.zip》資料免費下載
發表于 07-12 10:51
?0次下載
步進電機如何讓動起來?步進電機轉動原理
42步進電機的步距角為1.8°,是由定子和轉子的齒數共同決定的,定子有48齒,轉子有50齒,具體是怎么算的,感興趣的同學可以自行學習,今天的重點是讓步進電機如何讓動起來。
發表于 04-01 10:40
?4168次閱讀





 工商網監
工商網監
評論