 博爾森磁致伸縮位移傳感器如何檢測速度
博爾森磁致伸縮位移傳感器如何檢測速度

博爾森磁致伸縮位移傳感器主要通過測量物體的位移來提供精確的位置信息。在許多應用中,除了需要獲取位移信息外,還需要獲取物體的速度,例如在機器人、自動化生產線、液壓控制系統等領域。由于速度是位移隨時間的變化率,磁致伸縮位移傳感器可以通過以下幾種方式來檢測物體的速度。
1. 基于位移數據的速度計算
由于速度是位移對時間的導數,磁致伸縮位移傳感器本身提供的是位移信息,因此可以通過計算位移的變化率來間接獲得速度信息。具體來說,速度可以通過以下步驟計算:
(1) 獲取位移數據
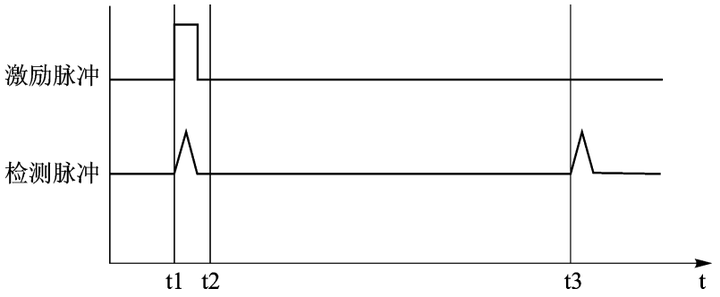
博爾森磁致伸縮位移傳感器實時測量物體的位移,輸出位移信號(如電流或電壓信號、數字信號等)。這些位移數據通常是傳感器在特定時間點的測量值。
(2) 時間間隔
通過控制系統或外部設備記錄每個采樣時刻的時間戳。位移傳感器的輸出通常會定時更新,控制系統會根據時間間隔計算相鄰兩次位移之間的變化。
(3) 計算速度
速度是位移的時間變化率,因此可以使用以下公式計算速度:
其中:
v(t)是在時間 t時刻的速度。
x(t)是在時間 t時刻的位移。
Δt是兩個連續時間點之間的時間間隔。
(4) 平滑處理
在實際應用中,由于噪聲或測量誤差,直接通過位移的變化來計算速度可能會產生波動。因此,通常會對速度數據進行平滑處理,例如使用低通濾波器或卡爾曼濾波器等方法,以減少噪聲的影響,并提高速度計算的穩定性。
2. 通過傳感器內部計算速度
一些現代的磁致伸縮位移傳感器不僅提供位移輸出,還可能包含內置的速度計算功能。這些傳感器通過以下方式直接提供速度信號:
內置微處理器:一些磁致伸縮傳感器內部集成了微處理器,可以實時計算位移的變化率,從而直接輸出速度信號。傳感器通過監測位移數據的變化,自動計算速度并輸出相應的模擬或數字信號(如電流或數字脈沖信號)。
快速響應:內置的計算功能和硬件支持使得傳感器能夠快速響應物體的運動變化,適用于高速動態控制應用,如高速生產線、自動化測試設備、機器人等。
3. 使用外部編碼器與傳感器配合
在某些情況下,博爾森磁致伸縮位移傳感器的輸出可能與其他類型的傳感器(如編碼器)配合使用,以提高速度測量的精度和響應速度。例如,增量編碼器可以與磁致伸縮傳感器結合使用,通過編碼器提供的旋轉角度或位移變化的頻率來檢測速度。
編碼器輸出頻率:編碼器通過測量轉動或位移的頻率,計算出相應的速度信息。結合磁致伸縮傳感器的位移數據,可以獲得更高精度的速度測量。
4. 典型應用實例
機器人運動控制:磁致伸縮位移傳感器通過實時監控機器人的關節位置,并通過計算位移變化率來提供精確的速度反饋,幫助控制系統調整機器人的運動軌跡和速度。
液壓系統控制:在液壓缸的應用中,磁致伸縮傳感器可以監控缸桿的位移,通過計算位移的變化率來實時反饋液壓缸的速度,幫助PLC或其他控制系統調整液壓流量和壓力,優化系統響應。
自動化生產線:在高速自動化生產線中,傳感器監控工作臺或傳送帶的位置變化,通過速度反饋調整生產過程的速度,確保生產線的精確同步。
5. 速度測量的優勢與挑戰
優勢:
高精度:通過磁致伸縮位移傳感器的精確位移測量,可以實現高精度的速度測量,尤其適用于高要求的應用。
實時反饋:速度是位移隨時間的變化,因此磁致伸縮傳感器可以提供快速、實時的速度反饋,適用于動態控制系統。
簡化設計:在不需要額外安裝速度傳感器的情況下,通過位移數據計算速度可以簡化系統設計,減少額外設備的需求。
挑戰:
噪聲影響:位移數據的噪聲可能影響速度計算的精度。需要使用濾波算法對數據進行平滑處理,以減少噪聲影響。
采樣頻率:位移傳感器的采樣頻率決定了速度計算的響應速度。在高速動態控制系統中,傳感器需要足夠高的采樣頻率以保證速度計算的實時性。
計算延遲:速度是位移的變化率,因此在計算時可能會引入一定的延遲,尤其在復雜控制系統中,可能需要優化速度計算和控制系統的反饋回路。
6. 總結
博爾森磁致伸縮位移傳感器通過測量位移并計算位移變化率,能夠提供精確的速度信息。無論是通過計算位移的變化率、內置微處理器的速度計算,還是與外部編碼器配合使用,磁致伸縮位移傳感器都能夠高效、準確地檢測物體的速度。對于高速動態控制和精密測量應用,如機器人、液壓控制、自動化生產線等,磁致伸縮位移傳感器的速度檢測功能提供了重要的支持。
本文轉載于深圳市博爾森科技有限公司官網
-
位移傳感器
+關注
關注
5文章
1169瀏覽量
35132 -
測量
+關注
關注
10文章
5219瀏覽量
113188
發布評論請先 登錄












 工商網監
工商網監
評論