 在英特爾AIPC上利用LabVIEW與YOLOv11實現目標檢測
在英特爾AIPC上利用LabVIEW與YOLOv11實現目標檢測

YOLO11是目標檢測領域的最新進展,采用了可編程梯度信息(PGI)和廣義高效層聚合網絡(GELAN)等創新技術,顯著提高了檢測精度和計算效率。在此基礎上,本文將使用 AI Vision Toolkit for OpenVINO for LabVIEW(以下簡稱AIVT-OV),在 intel AIPC 設備上部署YOLO11模型,并實現實時目標檢測。
1
前言
1.intel AIPC簡介
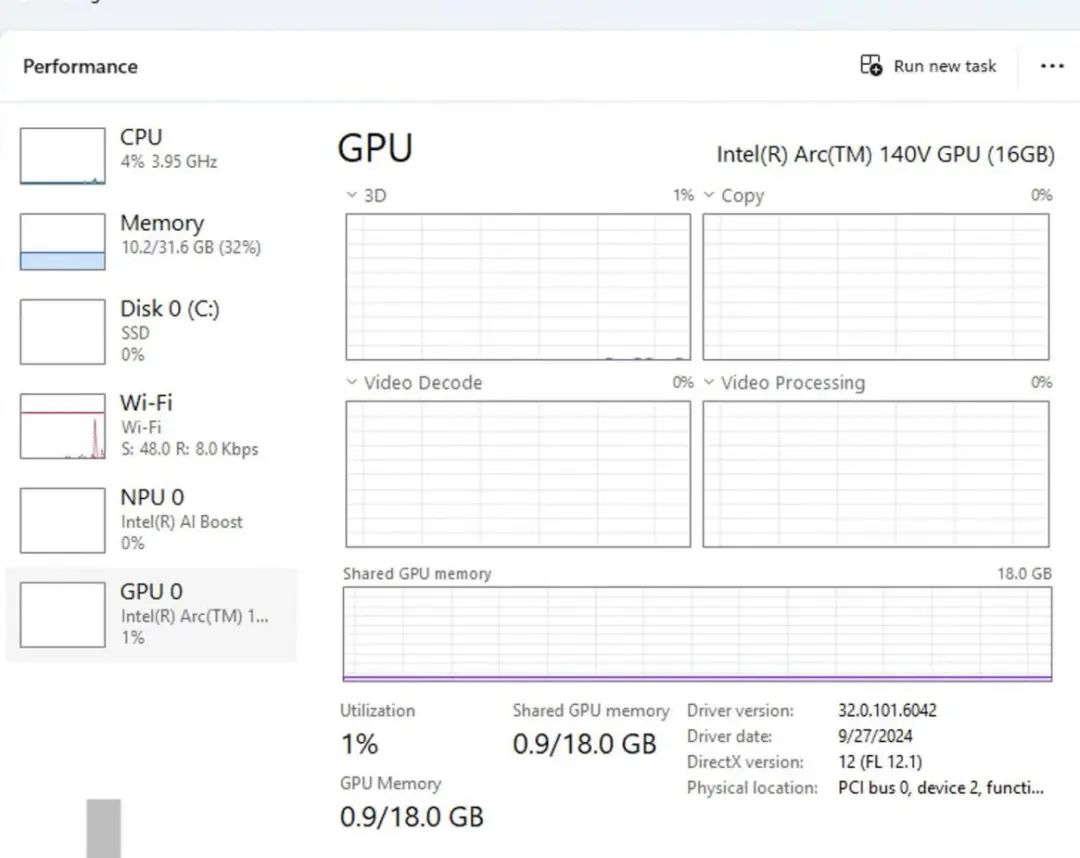
超薄超輕,手掌大小,接口豐富,滿足多種外部設備連接需求。搭載更快的英特爾 酷睿Ultra 7-155H 處理器,全新的三合一架構(CPU、GPU、NPU),是一款高性能迷你工作站,配備了以下硬件組件:
處理器(CPU):英特爾 酷睿Ultra 7-155H 處理器,提供卓越的計算性能。
內存(RAM):板載 32GB LPDDR5 內存,確保多任務處理和高負載應用的流暢運行。
GPU:內置英特爾 Arc 顯卡,支持高質量的圖形渲染和視頻處理。
NPU:集成英特爾 AI Boost NPU,為 AI 應用提供硬件加速,三重 AI “芯”引擎,算力高達 34 TOPS,提升 AI 任務的處理效率。
2. Vision Toolkit for OpenVINO for LabVIEW簡介
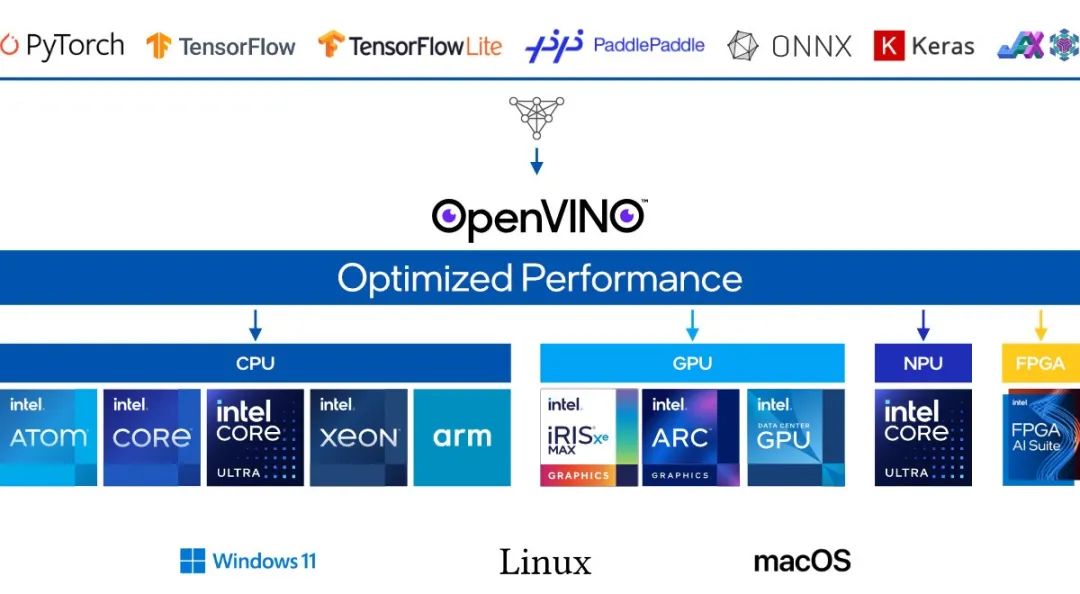
AI Vision Toolkit for OpenVINO for LabVIEW(以下簡稱AIVT-OV),由 VIRobotics 專為LabVIEW開發的獨立工具包,旨在充分利用OpenVINO的深度學習和計算機視覺優化功能。幫助LabVIEW用戶優化和加速在各種英特爾架構(如CPU、GPU和NPU)上的深度學習模型推理。
例如生成AI,視頻,音頻和語言,以及來自Pytorch,Tensorflow,tensorflow,onnx等流行框架的模型。并提供集成化的API,使開發者能夠快速在LabVIEW中構建、配置和部署圖像處理、視覺識別、生成AI以及語言等應用中的深度學習模型,加速應用落地。
通過該工具包,用戶能夠輕松地將YOLO11等深度學習模型與LabVIEW進行集成,從而實現高效的實時目標檢測,并在Intel硬件(如CPU、GPU、NPU)上加速推理任務,提升性能。
3. YOLO11簡介
YOLO11是Ultralytics團隊開發的YOLO(You Only Look Once)系列實時物體檢測器的最新版本,采用改進的主干和頸部架構,顯著增強了特征提取能力,以實現更精確的目標檢測和復雜任務性能。引入了精致的架構設計和優化的訓練管道,提供更快的處理速度,并保持準確性和性能之間的最佳平衡。隨著模型設計的進步,YOLO11m在COCO數據集上實現了更高的平均精度(mAP),同時使用的參數比YOLOv8m少22%,在不影響精度的情況下提高了計算效率。
YOLO11可以無縫部署在各種環境中,包括邊緣設備、云平臺以及支持NVIDIA GPU的系統,確保了最大的靈活性。無論是對象檢測、實例分割、圖像分類、姿態估計還是定向對象檢測(OBB),YOLO11都能應對各種計算機視覺挑戰。
YOLOv11官方開源地址:https://github.com/ultralytics/ultralytics
2
環境搭建
1.部署本項目所需環境
·操作系統:> = Windows 10(64位)
· LabVIEW:>= 2018 (64-Bit)。
· AIVT-OV:>=virobotics_lib_ai_vision_toolkit_for_openvino-1.0.0.64.vip
2.軟件下載與安裝
·參考官方指南進行安裝,確保所有依賴項正確配置。
3
AIPC上部署YOLO11模型
1.快速打開范例
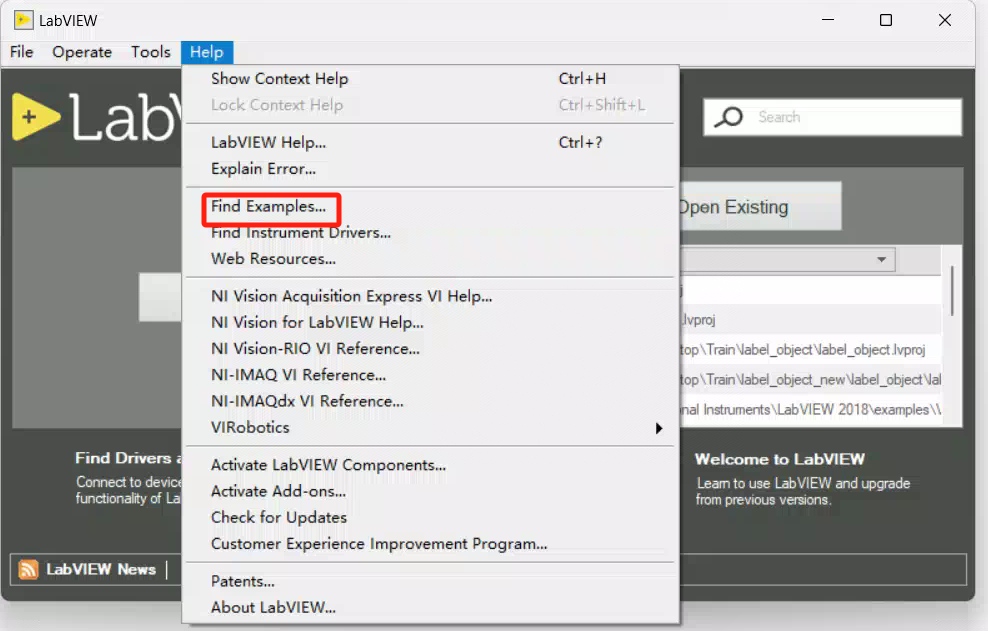
1.1 雙擊打開LabVIEW,在“Help”選項下找到“Find Examples…”單擊打開。
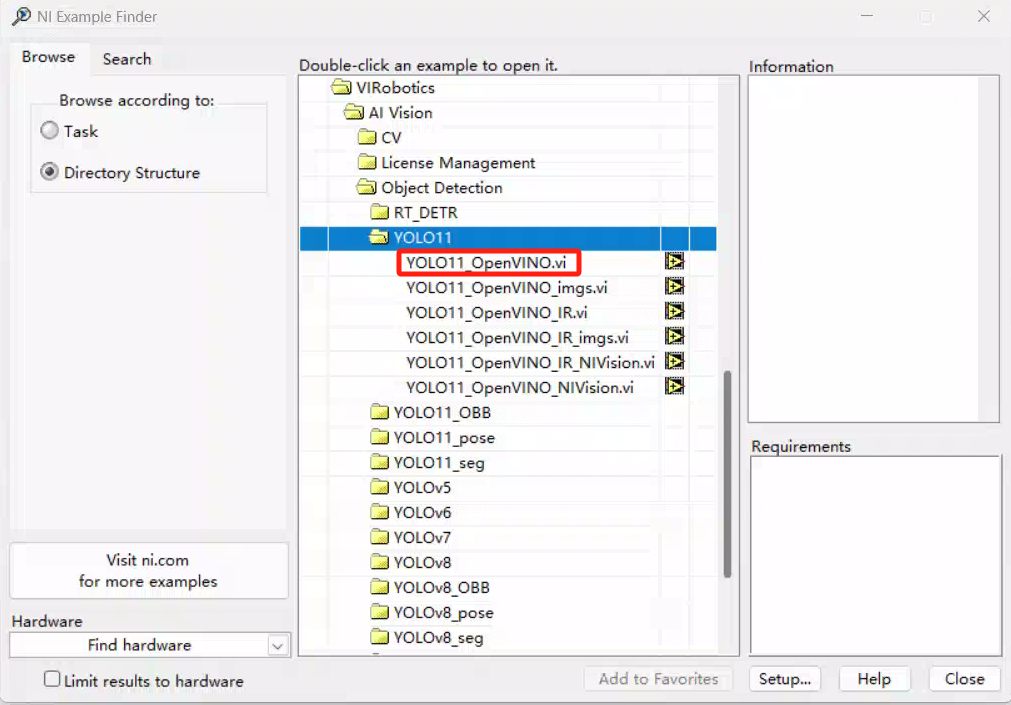
1.2 打開范例查找器,選擇Directory Structure–VIRobotics -AI Vision–Object Detection即可獲取所有目標檢測的范例。不同模型的范例,放到了不同文件夾下。
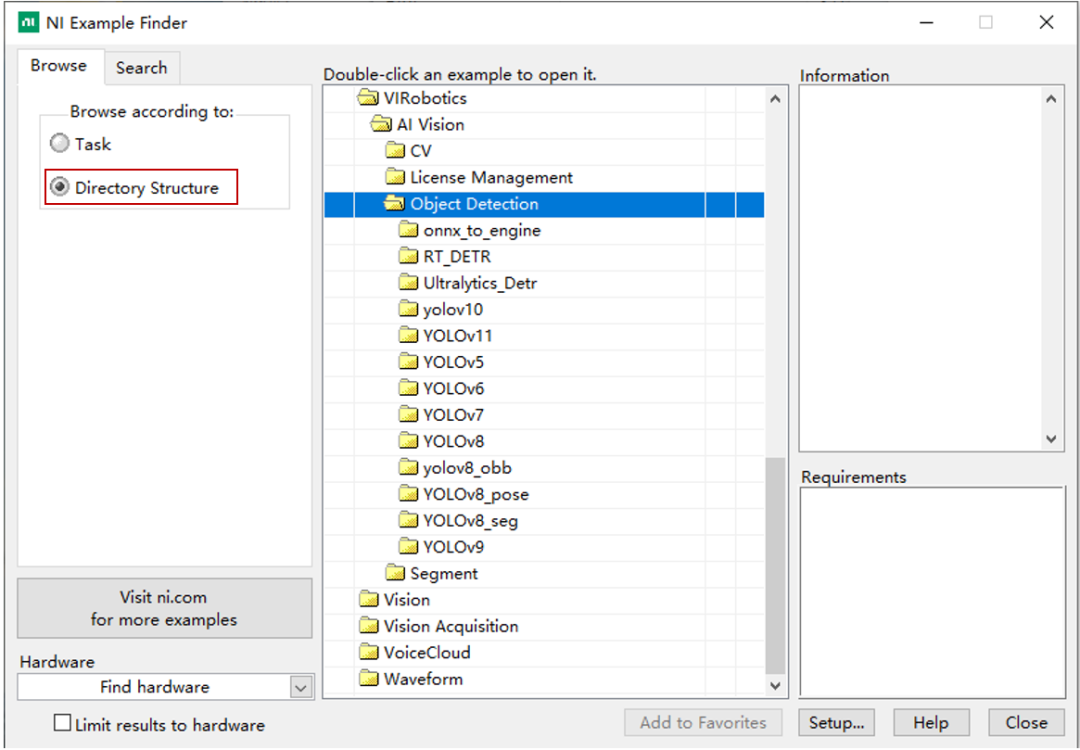
1.3雙擊“YOLOv11”范例文件夾,雙擊YOLO11_OpenVINO.vi
2.運行代碼
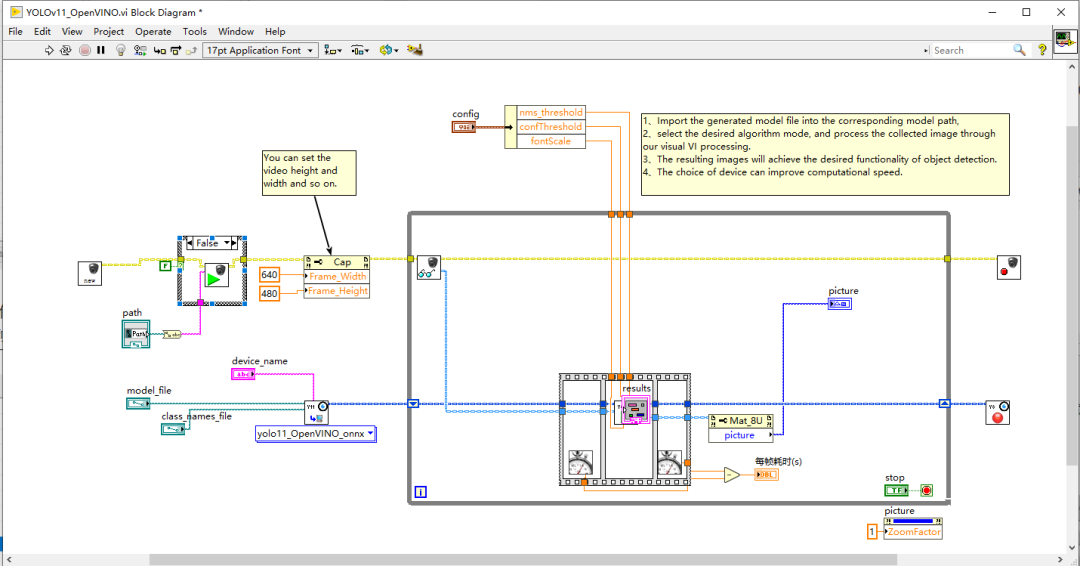
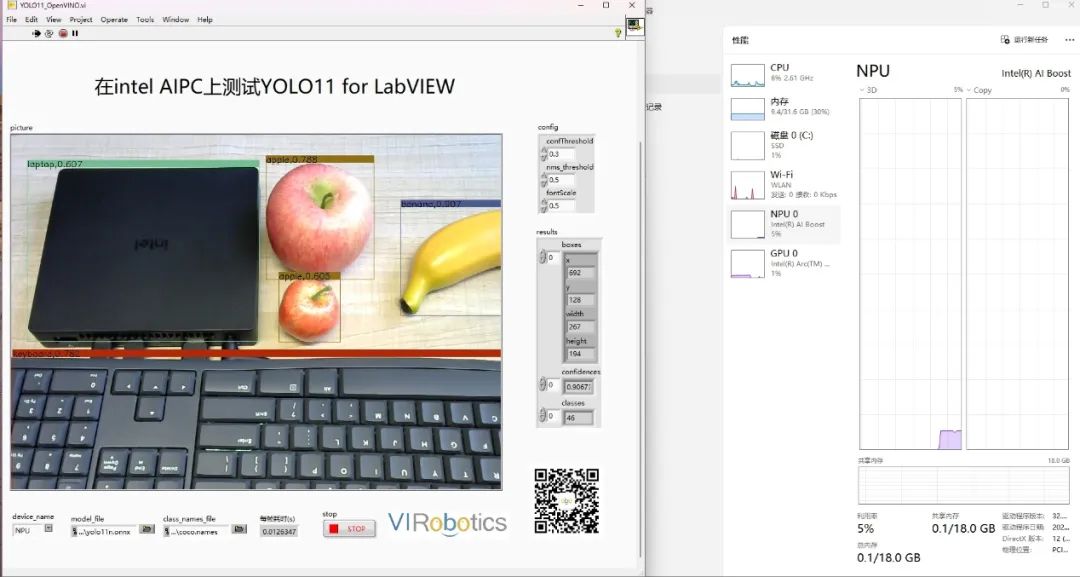
2.1完成環境搭建并加載模型后,運行 YOLOv11_OpenVINO.vi,代碼如下:
3.實測效果
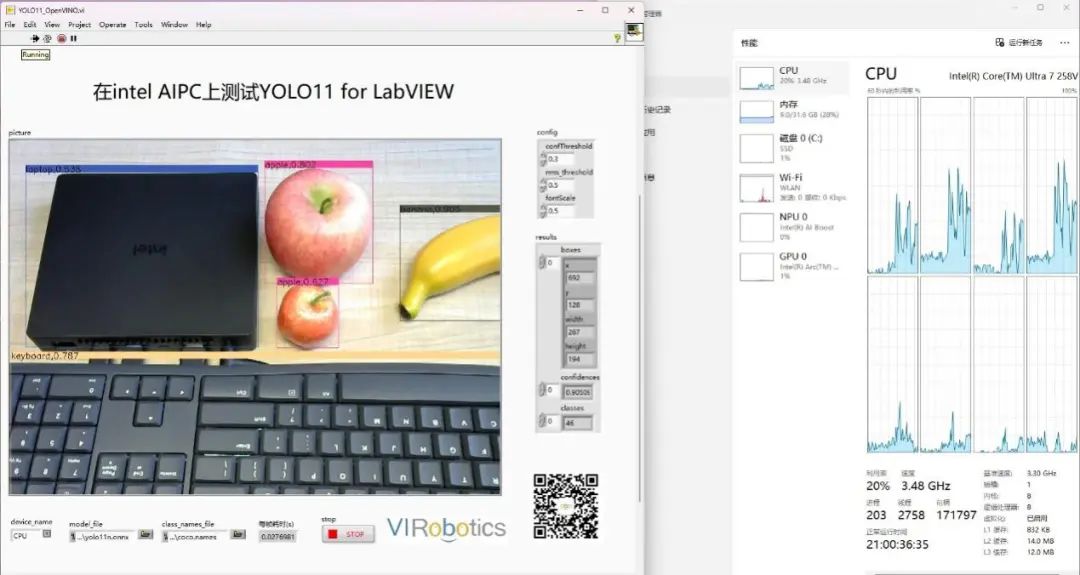
本次用于實時圖像采集的攝像頭分辨率為1080p, 采樣速率為30FPS,使用模型為yolo11n.onnx,模型輸入為640*640。
3.1 在CPU上實測效果
完成目標檢測過程,單路相機識別每幀圖像27ms左右。CPU在目標檢測過程中有一定的負載波動,尤其在處理較為復雜的圖像時,CPU負載有所上升。
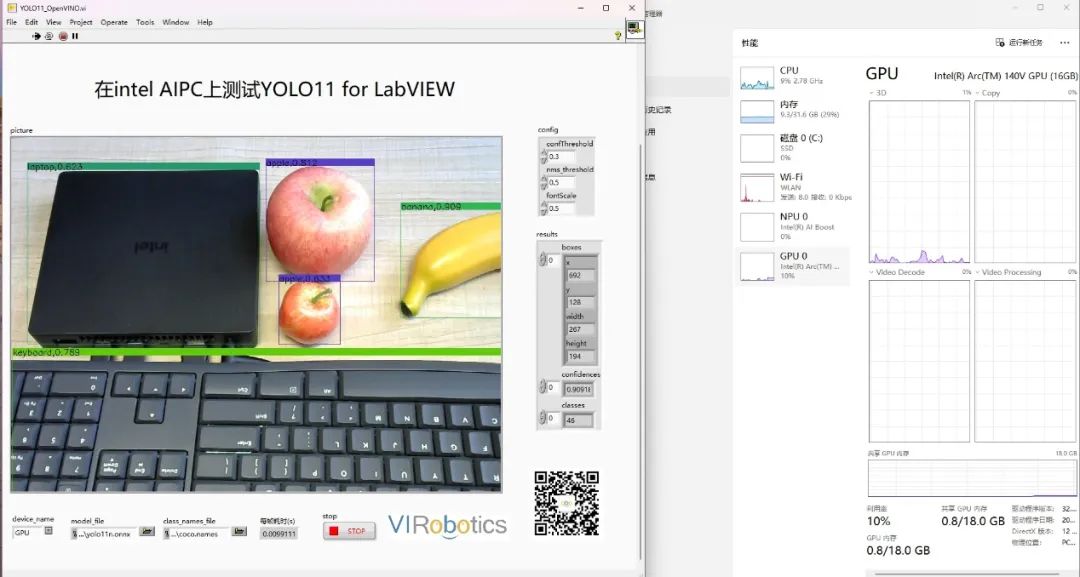
3.2 在GPU上實測效果
完成目標檢測過程,單路相機識別每幀圖像9ms左右,GPU有明顯加速推理的效果。
3.3 在NPU上實測效果
完成目標檢測過程,單路相機識別每幀圖像12ms左右,因沒有針對NPU進行模型的優化,所有NPU利用情況相對較低,使用優化之后的IR模型,速度應該會更快。
-
LabVIEW
+關注
關注
2002文章
3670瀏覽量
336079 -
目標檢測
+關注
關注
0文章
225瀏覽量
16023
原文標題:開發者實戰|LabVIEW +YOLO11 在英特爾 AIPC 上完成目標檢測(含CPU/GPU/NPU實測效果)
文章出處:【微信號:英特爾物聯網,微信公眾號:英特爾物聯網】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
新思科技與英特爾在EDA和IP領域展開深度合作
labview調用yolov8/11目標檢測、分割、分類
RK3576 yolov11-seg訓練部署教程
labview調用yolo目標檢測、分割、分類、obb
為什么無法檢測到OpenVINO?工具套件中的英特爾?集成圖形處理單元?
請問OpenVINO?工具套件英特爾?Distribution是否與Windows? 10物聯網企業版兼容?
為什么在Ubuntu20.04上使用YOLOv3比Yocto操作系統上的推理快?
在英特爾酷睿Ultra AI PC上用NPU部署YOLOv11與YOLOv12

英特爾帶您解鎖云上智算新引擎
使用英特爾哪吒開發套件部署YOLOv5完成透明物體目標檢測

在樹莓派上部署YOLOv5進行動物目標檢測的完整流程

YOLOv6在LabVIEW中的推理部署(含源碼)
使用PyTorch在英特爾獨立顯卡上訓練模型






 工商網監
工商網監
評論