 三維空間降噪裝置設計方案
三維空間降噪裝置設計方案
概述
隨著現代工業化進程的加快,噪聲污染已上升為一個嚴重的環境問題,和水污染、空氣污染、固體廢棄物污染一起被稱為當今的四大污染,引起了全球的關注。可以說日常生活中幾乎到處都充斥著噪聲,尤其像現在家庭中的各種家用電器如空調、洗衣機、冰箱等工作時都會產生噪聲污染;工廠中的一些工業設備, 如切割機、通風管道、壓縮機、發電機等在工作時也會產生大量的工業噪聲。
這些設備與人們的生活息息相關,所產生的噪聲也已嚴重危害到人們的健康。洗衣機的噪聲通常在 42~70dB,空調和冰箱在 34~50dB,而工業噪聲普遍都超過 90dB,最高可達 130dB。研究表明,人耳最高可以接受 70dB的聲音,超過50dB的噪聲就會影響人的正常休息,長時間睡眠不足會導致人體正常的生理機能出現問題;若噪聲達到 70dB會影響人們之間的交流,并使人出現躁動不安情緒,降低工作效率;長期身處 90dB以上的噪聲環境找那個會損傷聽力,并致使心腦血管等一系列疾病的發生;100dB左右的噪聲會使人頭痛,嚴重時會引發暫時性耳聾;當噪聲高達 140dB就會引起人的眼球振動,導致視覺模糊,呼吸加速,血壓升高,說話能力也受到影響。因此,對噪聲污染的治理是一個急需解決的問題。
一般而言,解決噪聲問題會從噪聲的源頭、傳播途徑和接收者三個方面入手。從原理上來分,進行噪聲控制的辦法主要包括無源(被動)控制(PassiveNoiseControl,PNC)和有源(主動)控制[1] (Active Noise Control,ANC)兩種。
無源控制是用聲學方法來實現降噪目的,其機理是利用聲學材料或聲學結構特性,通過吸聲處理、隔聲處理、使用消聲器、隔離振動等方法使聲波在傳輸過程中相互作用消耗聲能來降低噪聲,但是該方法僅在降低中、高頻噪聲時效果比較好,對低頻段噪聲抑制效果不理想,并且實現起來體積龐大、價格昂貴。然而現在大多數家用電器和機械設備所產生的噪聲都集中在低頻段,且頻率越低,聲波波長越長, 穿透能力也越強,更易對人體造成危害。此時有源控制的出現可以很好地將以上問題解決。
有源噪聲控制是將聲學和電子裝置相互配合,根據聲波相互抵消干涉原理,針對初始噪聲,產生一個與其幅度相同、相位相反的次級噪聲,兩列聲波在空間中互相疊加來降低噪聲。由此可知,實現有源控制的核心技術是對次級噪聲幅度和相位的調節[ 2-3] ,其核心思想如圖 1-1 聲波抵消圖所示。與無源控制相比,該方法能很好地降低低頻段噪聲,并且實現簡單、體積小、易于安裝。
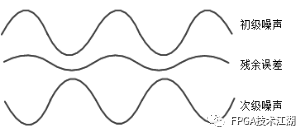
圖 1-1 聲波抵消圖(空間中某點的壓強隨時間變化圖)
主要創新點
低成本的非接觸式寬帶大范圍主動降噪:以座椅為載體,嵌入噪聲控制單元、機器視覺單元和運動控制單元,既避免了接觸式降噪(降噪耳機)容易導致出汗、甚至損傷聽力的缺陷,又避免了基于多揚聲器的陣列降噪系統的高成本。以極低的成本滿足了個人休息時的降噪需求。
系統架構
1.降噪處理單元硬件設計
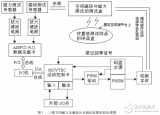
降噪處理單元核心為一個單核 ARM Cortex-M7微控制器,組成硬件還包括自適應聲音采集電路,揚聲器驅動電路和濾波電路,如圖 2-4 為它們的硬件組成框圖。
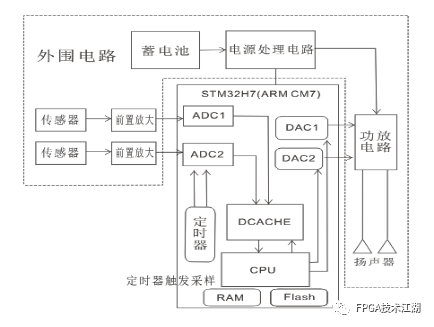
圖 2-4 硬件組成框圖
傳感器在 ANC系統中用來采集初級噪聲和殘余噪聲,其本身的特性直接影響 ANC算法的計算精度,進一步影響系統的降噪效果。在本次設計中考慮到需要在空間內采集噪聲信號,為了方便安裝和調整位置,選用了電容式咪頭,該話筒指向性為心形指向,頻響范圍為 40Hz~18kHz,正好符合系統對低頻信號的頻響穩定度,輸出阻抗為 600Ω,靈敏度為-40dB±2dB,可承受的最大聲壓級為115dB,采集距離遠,具有 20~50cm的參考拾音距離。
本系統使用話筒來采集噪聲以實現聲電轉換功能,但是由話筒采集轉換的電信號比較微弱,通常在 mV級水平,為了防止幅值太小而導致 A/D采樣位數的變化不大,需要將微弱的電信號放大到一定電平來得到合適的電壓,供后續電路使用。由于本次采集的是語音信號,頻響范圍較寬,而放大電路在對有用信號進行放大的時候也會將噪聲放大,因此該電路在設計時要保證自身噪聲盡可能小, 輸入阻抗足夠大,輸出阻抗足夠小,才能夠使信號在傳輸過程中失真較小,以保證信號的穩定性。本次設計選用 AD823構成兩級放大電路,一方面因為 AD823是高性能低噪聲雙運算放大器,有良好的輸出驅動能力和很高的小信號帶寬,能夠適用于各種音頻放大領域;另一方面由于 AD823可以采用 3.0V~36V的單電源供電,當供電電壓為 3.3V時,能夠與降噪處理單元核心的供電電壓一致,這樣不僅可以降低芯片功耗,還能減少電壓路數。具體的電路設計如圖 2-5 所示。
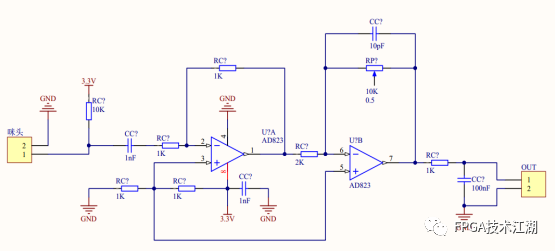
圖 2-5 前置放大電路
該電路中 AD823采用+3.3V單電源供電,因此由穩壓電路為其供電。其中R2和 R6構成第一級反相比例放大,放大倍數為 5.1 倍,R1和 RP7構成第二級反相比例放大,放大倍數為 50 倍,這樣整個電路就會有 255 倍的放大區間,完全滿足系統要求,可以通過調整滑動變阻器 RP7來改變放大倍數,以得到實驗時所需的電壓。此外團隊還設計了另一種自適應放大電路,以適用于不同噪聲大小環境,如附錄 I 所示。
1.2 功率放大電路設計
功率放大器在ANC系統中用來對控制器輸出的信號進行放大以驅動次級揚聲器發出次級噪聲。它的選擇要求其功率要和揚聲器匹配,匹配時功放的功率要大于揚聲器的功率。功放的阻抗也要和揚聲器相匹配,當功放的額定輸出阻抗與揚聲器的額定輸入阻抗相一致時,二者才能實現最佳匹配。如圖2-6 為TDA7377的電路圖。
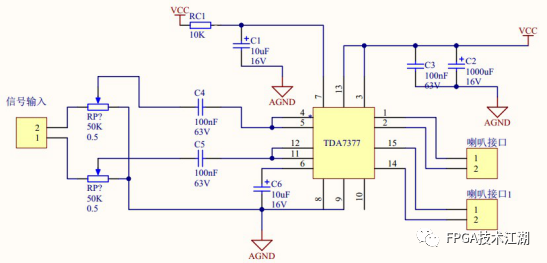
圖 2-6 功放電路
TDA7377是采用了新技術的AB類音響放大器。可以使用雙橋接輸出到兩個喇叭上,或者非橋接四單端輸出到四個喇叭。專業的完全互補輸出結構和內部固定增益保證了在大功率下輸出不失真,并且周邊原件非常少,簡化了電路。
經ANC算法處理輸出的次級信號需通過D/A轉換后連接至功放以驅動次級揚聲器在誤差傳感器范圍內產生次級噪聲。但由于D/A輸出受到系統采樣率的限制,其輸出的模擬信號會引入高頻干擾以及聲器發出的聲音中還存在高頻干擾會影響到最終的降噪效果,此時需要通過一個平滑濾波器來濾除高頻噪聲。而本電路設計原理圖如圖2-7 所示。由線性穩壓源供電,使用兩級低噪聲、高增益單片式運算放大器TL082構成四階濾波器,其中第一級中R1和C4、R2和 C1構成一個二階濾波器,同樣第二級中R3和 C2、R4和 C5構成另一個二階濾波器。
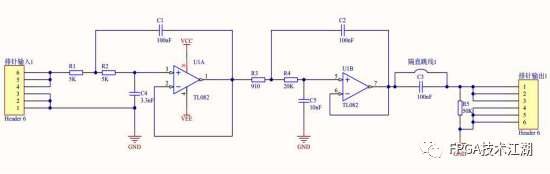
圖 2-7 DAC 輸出濾波器電路
2.降噪處理單元軟件設計
圖 2-8 為系統軟件結構框圖。系統先進行初始化,然后執行進行次級通道辨識,辨識結束后進行主程序,用誤差信號判斷是否對噪聲進行抵消。
在實際應用時,還需要根據控制器運算能力與實際降噪需要,預設一個系統采樣率,每次采樣完成后,利用 CPU將采樣結果歸一化,再將歸一化的采樣值送入算法函數,運算結果去歸一化送入 DAC。軟件初始化流程如圖 2-8(a)所示, 中斷處理(降噪)如圖 2-8(b)所示。
在本項目中,系統采樣率為 28.6 kHz,4 個次級通道階數均為 128,2 個主通道階數為 320,軟件利用基 16 的 FIR運算的作循環,并利用滾動儲存方式提升系統運行效率。
綜上,除 ADC、DAC,屏幕顯示,按鍵處理,內存讀寫等其它時間開銷外, 系統每秒所進行的浮點乘加運算超過 28.6 k * (128 * 4 + 320 * 2 * 3) = 69 M次。
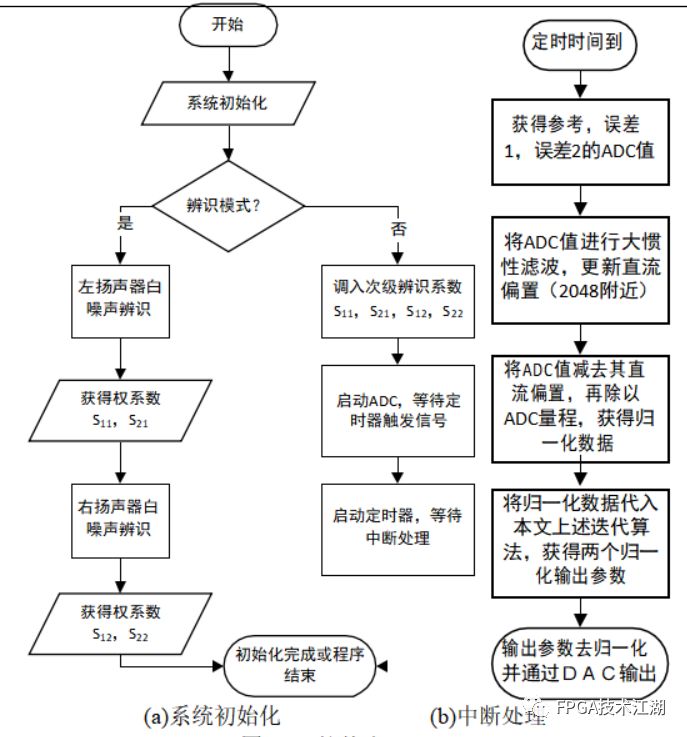
圖 2-8 軟件流程
設計演示
1. 次級通道離線辨識
首先進行次級通道離線辨識實驗,然后分別選用單頻、多頻和實際噪聲進行降噪實驗,評估降噪裝置的降噪效果,并通過聲壓計實時監測環境噪聲水平。
次級通道的辨識將影響到整體系統的收斂效果,本作品是使用帶限白噪聲進行辨識。
實驗條件:關閉噪聲源,降噪處理單元產生帶限白噪聲作為主信號,主信號通過D/A轉換和功率放大驅動次級揚聲器發聲,用傳感器采集該噪聲作為參考信號,兩路信號同時送入降噪處理單元內部并調用LMS算法經濾波處理產生輸出信號,參考信號與輸出信號的差值就是誤差信號,經LMS算法調節后系統很快收斂,用示波器觀察到誤差信號減小了大約10 倍,如圖5-1 所示。
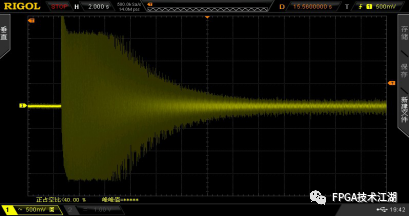
圖 5-1 次級通道離線辨識殘余誤差
使一位實驗者坐于安裝有實驗降噪器的座椅上,打開降噪器并進入辨識模式,等待系統收斂后,可由計算機串口獲得降噪器 4 個 128 階的次級通道系數。
如圖 6 所示,紅、綠、藍、紫四色線條,分別代表了四個次級通道模型,圖中橫坐標為模型階次,縱坐標為該階次對應的權系數。
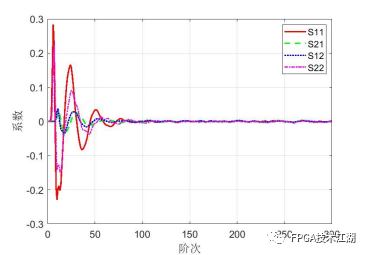
圖 5-2 次級通道建模結果
利用 MATLAB自帶的 FREQZ函數對次級通道系數進行分析,可獲得次級通道頻域特性。圖 5-3 展示了其中一個次級通道模型的頻域特性,其它次級通道模型特性與此類似。
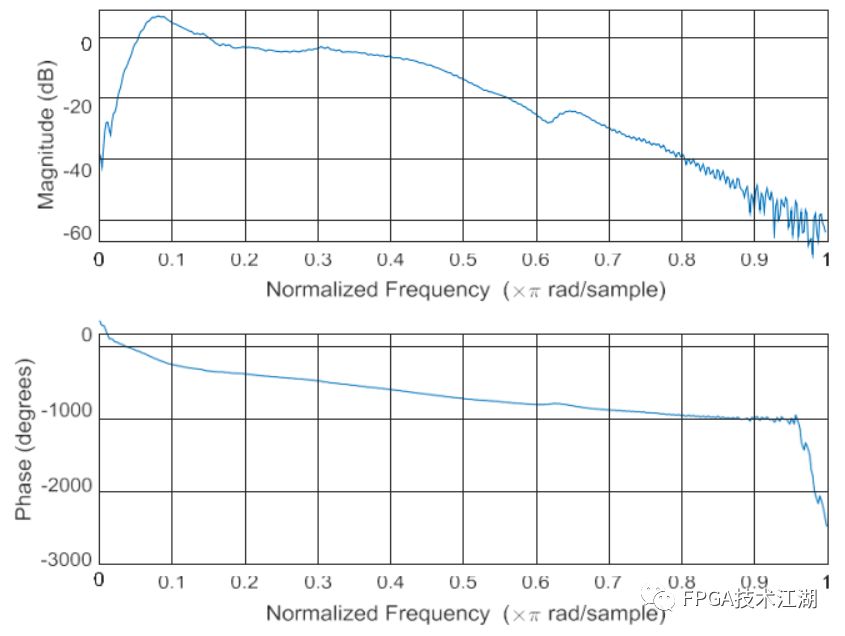
圖 5-3 次級通道模型S11(z)頻域特性由圖 5-2 可知,次級通道階數約為 100 階,預設的模型階數(128)能夠滿足實驗要求。在圖 5-3 中幅頻特性曲線,以-3 dB線作為通帶截止頻率,可見降噪器僅能對 180Hz-1200Hz的主濾波器輸出做出響應, 即降噪器的降噪范圍在180Hz-1200Hz內。根據降噪器系統組成可知,頻響下限主要由揚聲器性能決定, 頻響上限主要由 DAC輸出連接的低通平滑濾波器決定。
2.人為噪聲降噪結果
測試人為噪聲降噪效果的方法為:通過桌面版 Audio Sweep Gen軟件與3.5mm音頻口連接外置低音音響,產生 200 - 800Hz遞增的正弦單頻、雙頻信號以及 40 - 100Hz方波噪聲作為噪聲源,進行降噪測試。
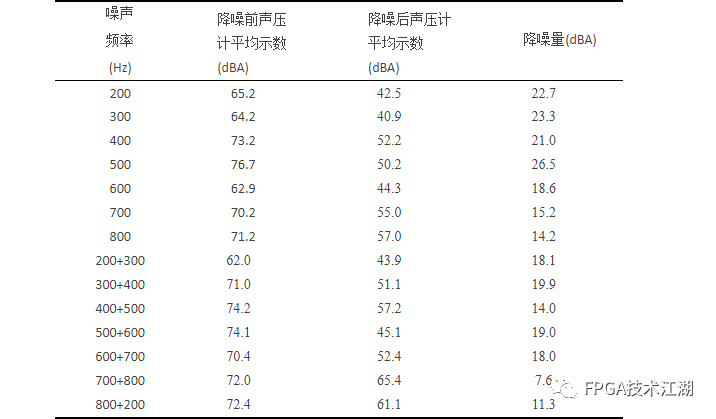
人為噪聲中,正弦噪聲可以檢驗降噪器的基本降噪能力,通過聲壓計觀測到的單雙頻測試部分結果如表 1 所示。
表 5-1 正弦噪聲降噪結果
誤差傳感器在一次單頻測試中的降噪效果如圖 5-4 所示,圖中,黃色波形是參考傳感器采集到的信號,青色波形是左誤差傳感器采集到的信號,降噪器在圖中的中間點打開。由圖可見系統在啟動后 150ms內即達到降噪效果。
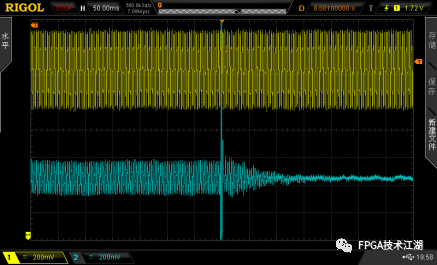
圖 5-4 單頻降噪測試波形方波噪聲的諧波分量可以覆蓋整個音頻范圍,通過方波可以測試系統對寬帶噪聲的降噪能力。如圖 5-5 為 100Hz的方波噪聲頻譜。
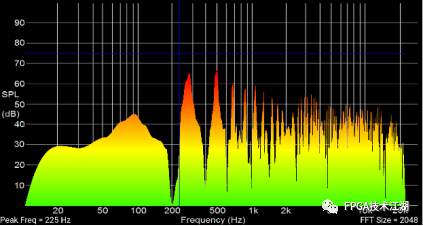
圖 5-5 100Hz 方波噪聲頻譜
圖 5-6 為了一次測試中誤差傳感器旁的殘余噪聲頻譜,由圖比例推算可知降噪器可以顯著降低方波噪聲中的低頻噪聲。同時也可看出,本不在降噪器降噪范圍的高頻噪聲也得到了降低,這表明玻璃窗本身對于中高頻噪聲有一定的隔絕能力。
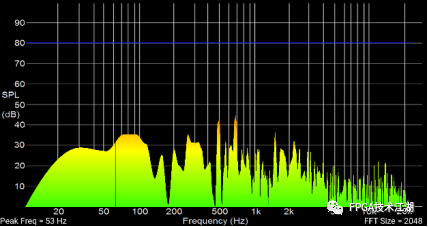
圖 5-6 100Hz 方波殘余噪聲頻譜
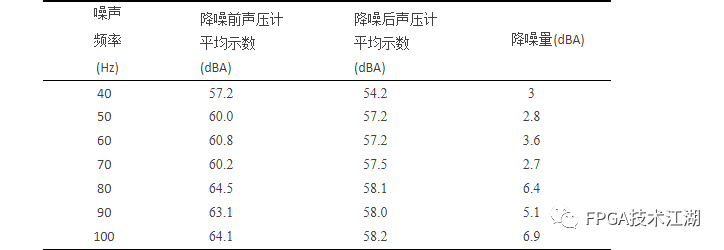
方波噪聲的部分降噪結果如表 5-2 所示,由表可知降噪器對于方波噪聲的降噪量在 2.7 ~ 7dB之間。比起正弦噪聲,方波噪聲降噪量大幅降低的主要原因為: 系統響應范圍決定了其對于低于 180Hz的低頻分量和高于 1200Hz高頻分量降噪能力有限,增大系統響應范圍需要使用固有頻率足夠低的揚聲器與運算足夠快的處理器。
表 5-2 方波噪聲降噪結果
3. 實際噪聲降噪結果
降噪器對于機械旋轉噪聲與汽車鳴笛聲的降噪結果如表 3 所示,由表可知降噪器對于幾種實際噪聲的降噪量在 5 ~ 10dB之間。表 3 實際噪聲降噪結果

降噪器在汽車鳴笛聲降噪實驗過程中波形如圖 5-7 所示。圖中,黃色波形是參考傳感器采集到的信號,青色波形是左誤差傳感器采集到的信號。
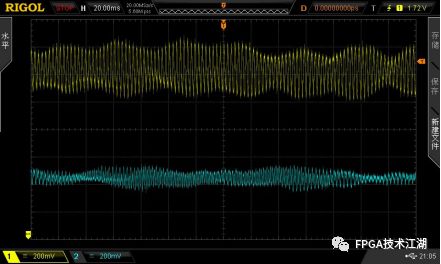
圖 5-7 鳴笛聲降噪測試波形
通過以上實驗發現,本次所設計的三維空間降噪裝置能夠降低生活中機械設備所產生的低頻噪聲。雖然在有些高頻分量處功率增大,但這部分功率密度較小,不會影響整個系統的降噪效果;由于生活中的噪聲成分更加復雜,降噪效果沒有單頻和多頻好,不足 10dB,但同樣可以驗證該系統設計的合理性和有效性。在本次實驗的基礎上,還需要更多的研究空間中聲場環境,并且對 ANC算法提出更高的要求。
-
微控制器
+關注
關注
48文章
7925瀏覽量
153880 -
噪聲
+關注
關注
13文章
1138瀏覽量
47952 -
降噪
+關注
關注
4文章
432瀏覽量
31735 -
三維空間
+關注
關注
0文章
19瀏覽量
7679
原文標題:三維空間降噪裝置
文章出處:【微信號:HXSLH1010101010,微信公眾號:FPGA技術江湖】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
基于多傳感器數據融合處理實現與城市三維空間和時間配準

labview 利用三維空間畫了一個球,然后想在球面上畫幾個點
請問ADXL345配合陀螺儀能精確測量短時三維空間運動路徑嗎?
基于麥克風陣列模擬人耳進行三維空間的聲源定位
三維空間中每一平面有四個點,能根據這四個點畫出一個圓來嗎 ?
基于交流伺服控制的三維空間磁場與磁力測試技術
基于伺服控制的三維空間磁場與磁力測試系統
多電平逆變器三維空間矢量調制
高精度低成本三維空間測量與定位技術分析
高精度三維空間定位之單目空間定位技術解析
適用于戶外環境的三維空間橢圓信道模型
立體倉庫三維空間路徑優化方案的介紹
一種基于基礎模型對齊的自監督三維空間理解方法





 工商網監
工商網監
評論