") 1個(gè)芯片就是一整個(gè)電機(jī)驅(qū)動(dòng)器,全網(wǎng)首發(fā)測(cè)評(píng)
1個(gè)芯片就是一整個(gè)電機(jī)驅(qū)動(dòng)器,全網(wǎng)首發(fā)測(cè)評(píng)

BLDC FOC控制還在哼哧哼哧的畫(huà)板子,寫(xiě)代碼,調(diào)參數(shù)?本文找到了一個(gè)電機(jī)控制“神器”,硬件實(shí)現(xiàn)FOC,無(wú)需代碼。此刻開(kāi)始,F(xiàn)OC變得更有意思咯——
電機(jī)控制算法有多磨人,幾位工程師朋友如是說(shuō):
如果你不是專(zhuān)業(yè)的電機(jī)算法工程師,而只是要做電機(jī)控制的應(yīng)用的話,也許有更好的方法,不用死磕算法,1個(gè)芯片就能搞定。
1個(gè)電機(jī)控制器=
MCU+電機(jī)驅(qū)動(dòng)器+門(mén)級(jí)驅(qū)動(dòng)器+源管理器
這個(gè)硬件實(shí)現(xiàn)FOC,無(wú)需代碼的神器就是ADI最新推出的高度集成的單片柵極驅(qū)動(dòng)器和電機(jī)控制器TMC9660。
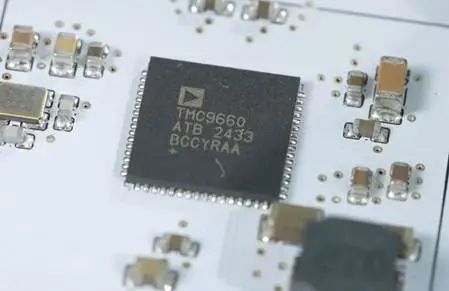
FOC控制的目標(biāo)是電機(jī),算法最終會(huì)在硬件上實(shí)現(xiàn),所以無(wú)需代碼的FOC控制,就意味著硬件要十分強(qiáng)大了。雖然尺寸僅有9mm x 9mm,64個(gè)引腳,但小巧的TMC9660內(nèi)部“暗藏乾坤”——
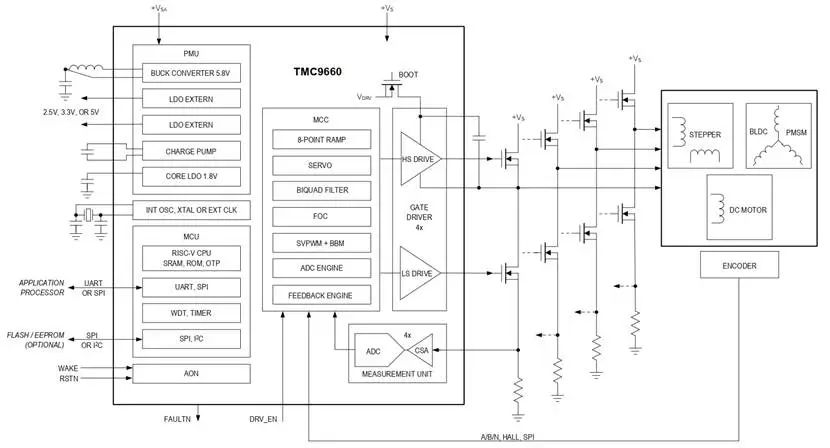
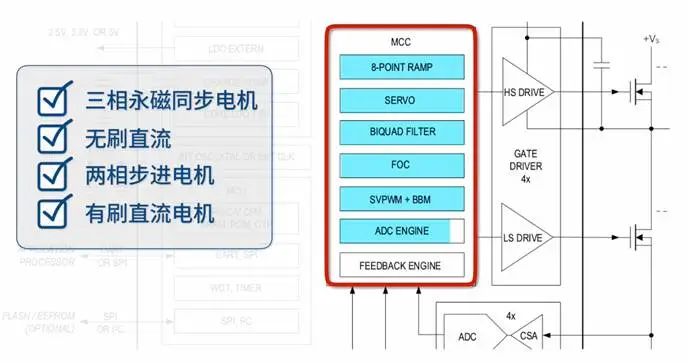
? Motion Control Core (MCC) 運(yùn)動(dòng)控制
這是TMC9660最關(guān)鍵的部分,以硬件實(shí)現(xiàn),具有高度的軟件可配置性:
1)硬件實(shí)現(xiàn)的磁場(chǎng)定向控制器/FOC,用于寬帶寬電流控制環(huán)路
2)硬件實(shí)現(xiàn)的位置、速度和扭矩控制器,可實(shí)現(xiàn)快速、精確的控制
3)8 點(diǎn) Ramp 生成器,在硬件中實(shí)時(shí)進(jìn)行 Ramp 計(jì)算,優(yōu)化電機(jī)的運(yùn)動(dòng)
4)快速空間矢量脈寬調(diào)制(SVPWM)引擎(2kHz ...100kHz),時(shí)鐘頻率為120MHz
因此,TMC9660能夠支持最常用的電機(jī)類(lèi)型的控制,包括三相永磁同步電機(jī) (PMSM)/無(wú)刷直流 (BLDC)、兩相步進(jìn)電機(jī)和有刷直流電機(jī)。
TMC9660內(nèi)部還嵌入了一個(gè)預(yù)編程的嵌入式微控制器系統(tǒng),這是TMC9660不可或缺的部分,可以用做基本的電機(jī)控制以及外部通信等。
這部分里面包含一個(gè)以40MHz運(yùn)行的32位RISC-V微處理器,帶SRAM(48KB)的存儲(chǔ)器、帶引導(dǎo)加載程序的OTP和只讀存儲(chǔ)器(ROM)、直接寄存器訪問(wèn)和參數(shù)固件。此外,還有用于通信的SPI、UART和I2C接口,電機(jī)控制(包括MCC、智能門(mén)驅(qū)動(dòng)器和測(cè)量單元/MU)和幾個(gè)定時(shí)器單元的外圍設(shè)備。
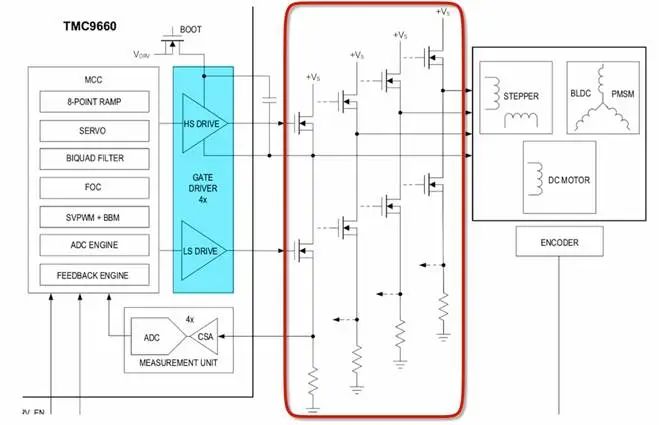
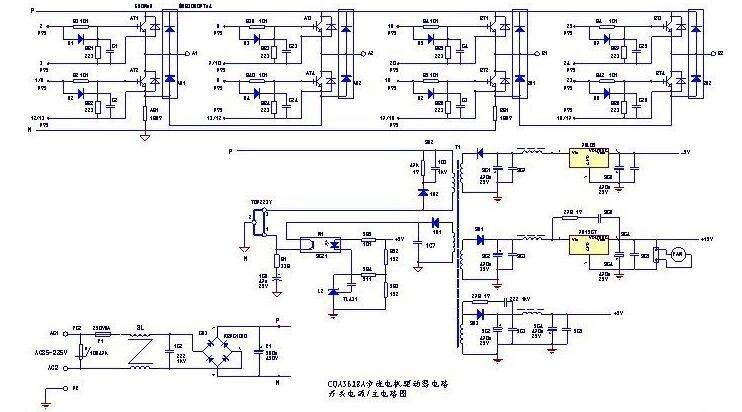
?Gate Driver驅(qū)動(dòng)單元
門(mén)級(jí)驅(qū)動(dòng)在電機(jī)控制系統(tǒng)中的重要性,想必很多小伙伴都知道。它是連接控制系統(tǒng)與功率半導(dǎo)體器件之間的重要橋梁,可以將控制電路發(fā)出的低電平控制信號(hào)轉(zhuǎn)化為能夠驅(qū)動(dòng)大功率半導(dǎo)體器件所需的大電流或高壓信號(hào),確保這些功率器件按照預(yù)定的開(kāi)關(guān)時(shí)序準(zhǔn)確無(wú)誤地工作。
TMC9660就集成了專(zhuān)為電機(jī)控制量身定制的70V專(zhuān)用智能門(mén)驅(qū)動(dòng)電路,可以驅(qū)動(dòng)多達(dá)四個(gè)外部NMOS+NMOS半橋。此外還有可配置的用于EMI緩解的斜率控制、用于防dV/dt誘導(dǎo)導(dǎo)通、過(guò)電流和柵極短路保護(hù)的智能定序器等等。
?PMU電源管理單元
TMC9660集成的電源管理單元老厲害了。
首先,它有很寬范圍的工作電壓,低至7.7V,高達(dá)70V的電源都可以工作。這樣,電機(jī)的電源電壓就可以給它供電,不再需要額外的電源芯片了。
其次,一個(gè)電機(jī)電源,TMC9660不僅可以自己用,還可以給外部負(fù)載供電,這得益于它內(nèi)部集成的一個(gè)DC/DC轉(zhuǎn)換器(降壓)、一個(gè)電荷泵、兩個(gè)可配置的LDO,以及兩個(gè)為T(mén)MC9660內(nèi)部供電的1.8V LDO。
從這些TMC9660內(nèi)部構(gòu)成來(lái)看,所以我說(shuō)1片TMC9660,可以是電機(jī)驅(qū)動(dòng)器,可以是MCU,可以是門(mén)級(jí)驅(qū)動(dòng)器,可以是電源管理器。
TMC9660電機(jī)運(yùn)動(dòng)控制demo
全網(wǎng)首發(fā)評(píng)測(cè)
TMC9660真的不需要代碼,就可以進(jìn)行FOC控制嗎?全球排名前列的電子元器件授權(quán)代理商WT文曄科技,與B站大V達(dá)爾聞合作,全網(wǎng)首測(cè)TMC9660電機(jī)運(yùn)動(dòng)控制demo。
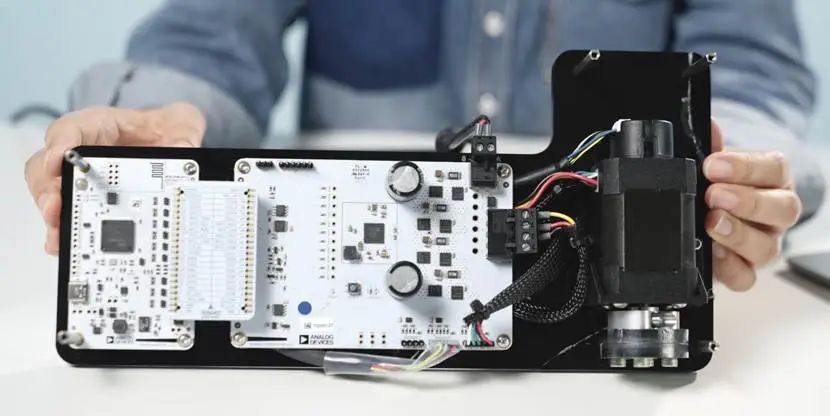
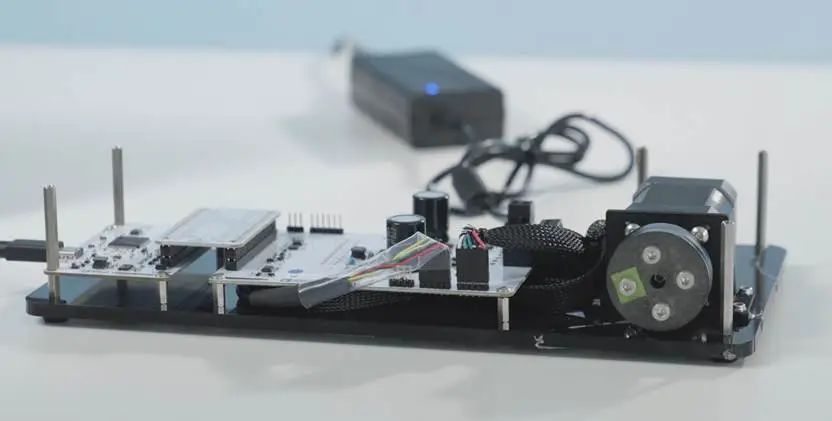
這套demo由四個(gè)部分組成:
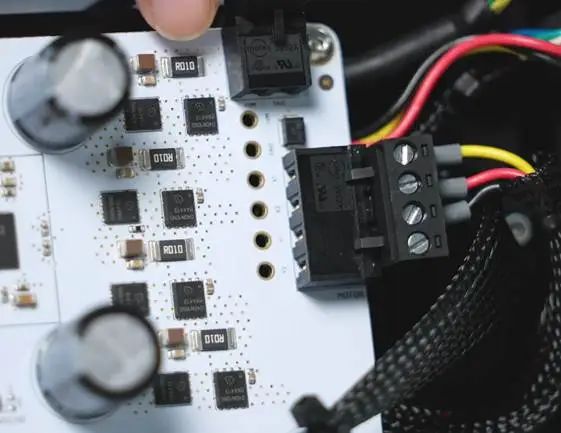
1)TMC9660-STEPPER-EVAL評(píng)估板
在評(píng)估板上,除了TMC9660和簡(jiǎn)單的外圍電路之外,還有MOS橋部分,以及一些接口:
1個(gè)電機(jī)接口連接電機(jī)的UVW三相;2個(gè)編碼器和1個(gè)霍爾傳感器的接口,接受來(lái)自電機(jī)的反饋信號(hào);1個(gè)UART和1個(gè)SPI接口,與外部進(jìn)行通信
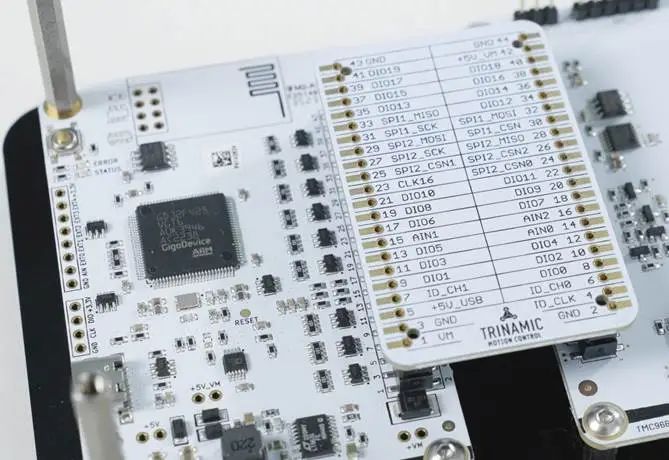
2)PC接口板:也就是Landungsbrücke接口板,板子上有一顆MCU,通過(guò)USBtype-C接口,可以連接電腦。這是模塊化評(píng)估系統(tǒng)之一,使用它,即使是沒(méi)有任何運(yùn)動(dòng)控制經(jīng)驗(yàn)的工程師也可以快速上手。
3)橋接板:也是連接器板,通過(guò)它,可以訪問(wèn)PC接口板和相應(yīng)評(píng)估板之間的所有信號(hào)。
4)電機(jī):這里連接的是BLDC電機(jī)。
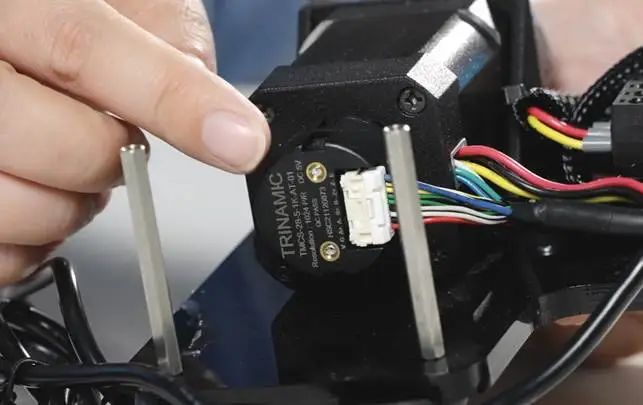
通過(guò)官方的PC接口板和橋接板,一根USB typc-C的數(shù)據(jù)線,一個(gè)電源,連上評(píng)估板,一切準(zhǔn)備就緒了。
軟件IDE
配置FOC
在硬件上實(shí)現(xiàn)FOC控制,其實(shí)是原廠工程師已經(jīng)在芯片底層做完了FOC算法,我們只需要在上層進(jìn)行寄存器或者參數(shù)配置就可以了,其中參數(shù)模式更為簡(jiǎn)單,就相當(dāng)于直接買(mǎi)個(gè)成品的驅(qū)動(dòng)器了。
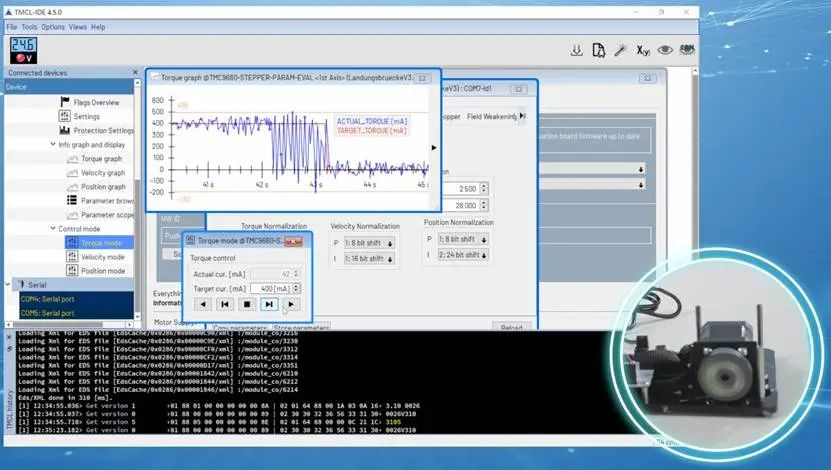
TMC9660配置可以通過(guò)橋接板使用官方的TMCL-IDE進(jìn)行調(diào)試,也可以使用USB轉(zhuǎn)UART的接口連接電腦,然后使用電腦自帶的PowerShare命令行調(diào)試。
好的配套軟件,可以幫助工程師快速的上手,TMCL-IDE就是功能十分強(qiáng)大的調(diào)試工具,所以為了展示它的強(qiáng)大,我們就通過(guò)PC接口板連接電腦,體驗(yàn)TMC9660。
總結(jié)一下重點(diǎn)的配置步驟:
第一步:準(zhǔn)備好硬件連接,以及在PC上安裝TMCL-IDE。
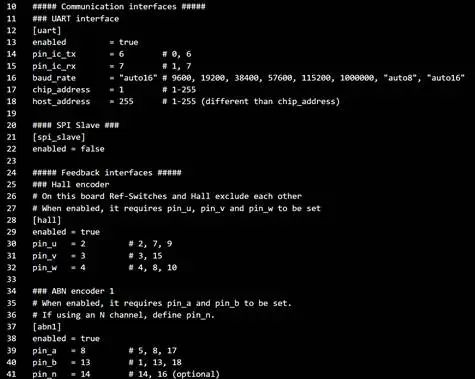
第二步:上電,在TMCL-IDE選擇板卡:TMC9660-stepper-BL,并將ioconfig配置文件upload到板子。配置文件包括TMC9660的SPI、UART通信接口設(shè)置,霍爾、編碼器接口與TMC9660的IO對(duì)應(yīng)等信息。
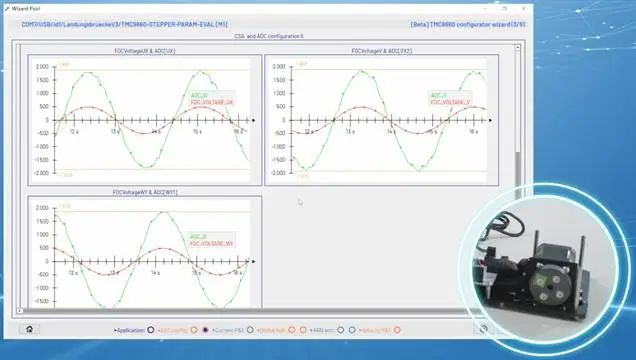
第三步:開(kāi)啟FOC配置
1)選擇連接的電機(jī),BLDC,設(shè)置電機(jī)參數(shù),最大電流3A。
2)配置CSA和ADC,并讓電機(jī)開(kāi)環(huán)轉(zhuǎn)起來(lái),紅色電壓,綠色反饋回來(lái)的電流一致,但電機(jī)動(dòng)作有抖動(dòng)。
3)電流環(huán)PI配置,可以直接點(diǎn)擊同步參數(shù),以及推薦PI值,點(diǎn)擊測(cè)試,目標(biāo)電流和實(shí)際電流,響應(yīng)很及時(shí),也沒(méi)有超調(diào)。
4)霍爾配置,讓實(shí)際反饋和控制落在同一象限,并進(jìn)行測(cè)試,反饋的電壓、電流與目標(biāo)值也是一致。
5)編碼器配置,讓實(shí)際和控制保持同一方向。然后設(shè)置基于編碼器的FOC控制,觸發(fā)方式選擇霍爾,這個(gè)時(shí)候測(cè)試電機(jī),就沒(méi)有抖動(dòng),很平穩(wěn)的運(yùn)行。
6)速度環(huán)PI配置,直接可以點(diǎn)擊findcurrent,找到配置參數(shù),然后再次測(cè)試,電機(jī)會(huì)自動(dòng)正轉(zhuǎn)與反轉(zhuǎn),并且電流和電壓的響應(yīng)情況,可以看到與目標(biāo)一致。
通過(guò)這幾步,就輕松的完成TMC9660的配置了,接下來(lái)就可以基于FOC控制了。
接下來(lái),就可以調(diào)整PID參數(shù),讓電機(jī)運(yùn)動(dòng)到最佳狀態(tài)。
TMCL-IDE還提供了參數(shù)設(shè)置與反饋數(shù)據(jù),還有更直觀的曲線圖,包括速度上升或下降曲線,電流大小等。
一套流程走下來(lái),大家發(fā)現(xiàn)沒(méi),真是輕輕松松就可以配置好TMC9660的FOC控制了,全程不需要任何代碼。
當(dāng)然,本次只是上手體驗(yàn)了TMC9660最基本的控制,如果真的用在項(xiàng)目中,還是得好好研究一下。不過(guò),即使遇到問(wèn)題,也不用怕,WT文曄可以為大家提供支持,有需要可以通過(guò)郵件聯(lián)系我們。
-
芯片
+關(guān)注
關(guān)注
460文章
52616瀏覽量
442590 -
電機(jī)控制
+關(guān)注
關(guān)注
3574文章
1978瀏覽量
272270 -
電機(jī)驅(qū)動(dòng)器
+關(guān)注
關(guān)注
16文章
685瀏覽量
65608 -
FOC
+關(guān)注
關(guān)注
21文章
350瀏覽量
44461
發(fā)布評(píng)論請(qǐng)先 登錄
基于電機(jī)的應(yīng)用制作一個(gè)8通道電機(jī)驅(qū)動(dòng)器模塊電路
一個(gè)電機(jī)驅(qū)動(dòng)器驅(qū)動(dòng)6個(gè)電機(jī)
基于3955的步進(jìn)電機(jī)驅(qū)動(dòng)器設(shè)計(jì)
七特步進(jìn)電機(jī)驅(qū)動(dòng)器型號(hào)
步進(jìn)電機(jī)驅(qū)動(dòng)器工作模式_步進(jìn)電機(jī)驅(qū)動(dòng)器電路圖
電機(jī)驅(qū)動(dòng)器是什么
如何計(jì)算電機(jī)驅(qū)動(dòng)器的功耗?
驅(qū)動(dòng)器和電機(jī)驅(qū)動(dòng)器的概念
柵極驅(qū)動(dòng)器芯片的原理是什么
步進(jìn)電機(jī)驅(qū)動(dòng)器撥碼開(kāi)關(guān)的調(diào)節(jié)方法
步進(jìn)電機(jī)驅(qū)動(dòng)器細(xì)分怎么調(diào)
電源芯片U8623在電機(jī)驅(qū)動(dòng)器的應(yīng)用
伺服驅(qū)動(dòng)器與傳統(tǒng)電機(jī)的區(qū)別
可以驅(qū)動(dòng)兩個(gè)直流有刷電機(jī)、一個(gè)雙極步進(jìn)電機(jī)的雙H橋電機(jī)驅(qū)動(dòng)芯片-SS8833E






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論