 慣性測量單元傳感器在自主移動機器人的應用
慣性測量單元傳感器在自主移動機器人的應用
利用IMU增強機器人
定位與實現精確導航
慣性測量單元(IMU)傳感器可實現機器人的定位與導航,已成為機器人精確定位的重要組成部分。IMU集成了加速度計、陀螺儀和磁力計,通過提供實時響應,使機器人能夠準確地確定其方向、位置和運動,從而使機器人能夠在動態變化的環境中導航。本文將為您介紹IMU的功能特性,與在自主移動機器人(AMR)的應用,以及ADI所提供的相關解決方案。
IMU幫助在AMR運行環境中實現精確定位
IMU可提供關鍵的運動數據,已成為機器人精確定位的重要組成部分。傳感器融合技術可將IMU數據與其他傳感器(例如攝像頭或LIDAR)相結合,通過整合多個數據源來提高定位精度。IMU廣泛應用于移動機器人、人形機器人、無人機(UAV),以及虛擬/增強現實。它們在實現精確定位方面發揮了重要作用,使機器人能夠自主執行復雜任務并與周圍環境有效互動。
AMR對于未來的智能工廠和倉儲至關重要,在塑造未來自動化、可持續和清潔的工廠方面發揮著關鍵作用。AMR可提高效率、減少浪費并優化工業環境中的利用率。雖然未來可能會專門為AMR建造和優化工廠環境,但讓這些機器人適應現有的倉庫和工廠仍面臨諸多挑戰。AMR面臨的主要障礙涉及兩個關鍵部分,包括如何高效路徑規劃(確定最佳路徑)和精確定位(不斷更新其在環境中的位置)。
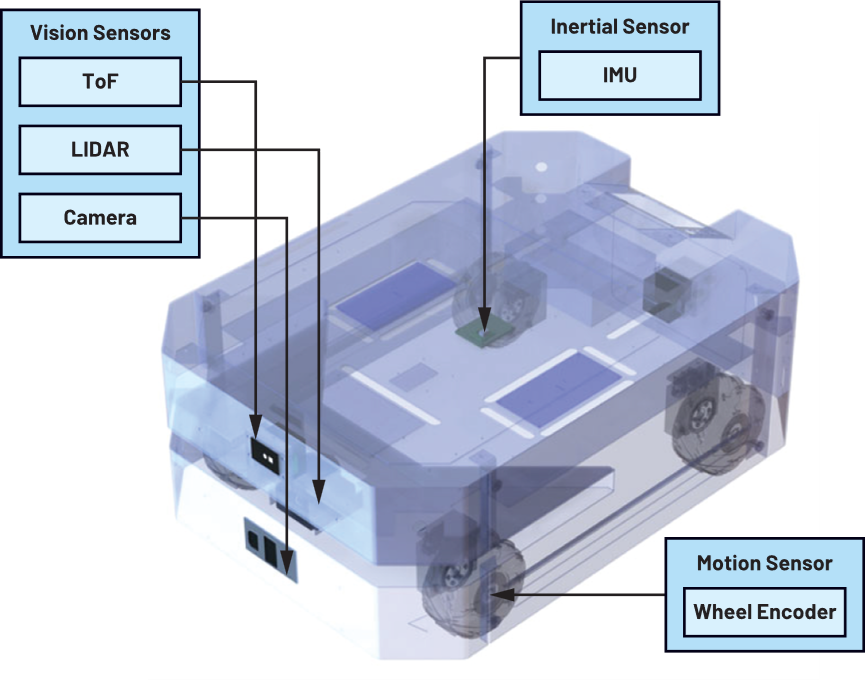
由于GPS無法在覆蓋的封閉環境下進行室內導航,因此AMR需要利用一系列傳感器和算法進行定位和導航。其中包括攝像頭、LIDAR和雷達等視覺傳感器,以及車輪編碼器和IMU等測程傳感器。每種傳感器模式在范圍、準確性和傳感信息方面都各有優勢。這些傳感器的組合可確保提供全面的數據,從而在動態環境中有效定位機器人。
高性能IMU提升AMR的定位與導航能力
IMU是由微機電系統(MEMS)器件構成的微型器件。其中通常包括三軸加速度計、三軸陀螺儀、高性能磁力計等。三軸加速度計用于測量相對于地球重力場的加速度。三軸陀螺儀用于測量旋轉速率,提供三個軸上每個軸的角速度。高性能磁力計可提供磁場測量,對于在具有挑戰性的環境中準確估計方向至關重要。此外,還有其它種IMU,如溫度傳感器用于補償溫度變化,氣壓計用于測量壓力。
IMU的高刷新速率的實時定位,是自主性和實時導航是機器人操作環境中的關鍵要素。然而,感知傳感器的刷新速率通常受到限制,大概在10 Hz到30 Hz的范圍內。相比之下,IMU擁有提供高保真位置輸出的能力,最高可達200 Hz。更高的刷新速率,顯著提高了系統在動態環境中,快速適應方向快速變化時的可靠性,從而有助于快速響應。憑借加速的刷新速率,AMR還能夠在其他測量之間的短暫間隔內提供估計姿態。因此,IMU在實現實時定位方面發揮著關鍵作用,其刷新速率比感知傳感器快10倍。
另一方面,IMU是航位推算的支柱,航位推算是一種根據先前已知的位置估計當前位置的導航技術。IMU可隨著時間推移不斷提供位置、方向和速度數據,從而實現精確估計,有助于AMR實現可靠導航。
此外,IMU具有緊湊的尺寸和輕便的設計,非常適合集成到各種移動機器人配置中。IMU并需要具備在不同環境中的可靠性,具有一定的抗電磁干擾能力,可以在多種環境中運行,包括室外和室內環境。因此,它們適合廣泛的應用。
IMU還可以通過加快刷新速率提高可靠性,感知傳感器的刷新速率通常限制在約10 Hz至30 Hz之間,而IMU可提供高達4 kHz原始數據的高保真位置輸出,具有顯著的優勢。更高的刷新速率增強了可靠性,特別是在動態環境中,使AMR能夠快速響應,并有助于在其他測量之間的短期間隔內估計姿態。
在已經有視覺傳感器的情況下,IMU對AMR來說仍然必不可少,這是因為AMR通常具有多種視覺傳感器,例如飛行時間(ToF)、攝像頭、LIDAR等。盡管視覺測程提供了豐富的數據集,但IMU仍有存在的必要性。
例如,AMR可在特征稀疏的走廊中導航,同步定位與地圖繪制(SLAM)算法本質上通過匹配觀察到的傳感器數據來工作,這些數據存儲在地圖中以便在地圖內進行定位。IMU還可實現在廣闊的開放環境中導航,當在大型開放空間(如50 m×50 m的大型倉庫)中工作時,因為各個獨特特征超出了傳感器范圍(LIDAR的最大范圍通常約為10 m到15 m),AMR的測程功能無法發揮作用。
當在斜坡上行駛時,傳統的SLAM算法依靠LIDAR時會遇到挑戰,因為2D點數據不顯示坡度信息。IMU可通過提取坡度信息來幫助解決這一難題,從而有效地在斜坡上導航。利用IMU導航時,需要具備對環境因素的敏感性,LIDAR傳感器對各種環境因素很敏感,例如環境光、灰塵、霧和雨。這些因素會降低傳感器數據的質量,進而影響SLAM算法的性能。IMU可以在各種環境中可靠運行,因而成為移動機器人在發揮多功能性時的合適選擇。
傳感器融合可提高IMU的可靠性與數據質量
然而,世界上并沒有十全十美的傳感器,盡管IMU有其優勢,但也存在風險并會帶來一些挑戰,像是IMU測量容易受到噪聲的影響,這會降低機器人導航和控制的準確性。為了補償噪聲,IMU通常采用先進的濾波技術,例如卡爾曼濾波或FIR。
另一方面,IMU傳感器會隨著時間的推移積累偏置,這會導致方向和運動估計出現誤差。為了解決這個問題,采用了偏置估計算法來不斷更新IMU傳感器讀數。此外,IMU傳感器會表現出非線性行為,這會進一步加劇數據處理和解釋的復雜性。為了對非線性度進行補償,需要對其進行校準以表征傳感器的行為并應用適當的校正。
隨機游走現象也是需要考慮的議題,IMU易受到外部熱機械事件的影響,導致ARW(角度隨機游走(陀螺儀中))和VRW(速度隨機游走(加速度計中))出現誤差。該如何降低這些風險呢?傳感器融合將是重要的技術!
傳感器融合可提高可靠性、提高數據質量,以及更好地估計未測量的狀態,并增加覆蓋范圍從而確保安全。傳感器融合需要靠算法來支持,擴展卡爾曼濾波等狀態估計技術可以糾正常規AMR運行期間的噪聲、ARW和偏置不穩定性誤差,并通過測量地球引力加速度,可以消除IMU中的俯仰和滾轉陀螺儀誤差,該算法會跟蹤和糾正偏置漂移,并糾正ARW誤差。
擴展卡爾曼濾波器(EKF)則可用在即使建模系統的確切性質未知,也支持對過去、現在和未來狀態的估計。隨著時間的推移,觀察到的測量值包含高斯白噪聲或其他不準確性,并通過同步傳感器之間的測量、預測姿態和誤差估計、估計和更新預測值的不確定性,利用這些方式來估計測量的真實值。
高精密度的微型微機電系統慣性測量單元
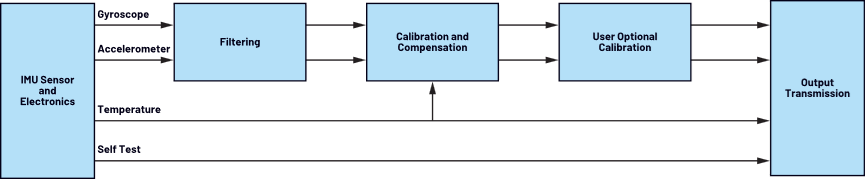
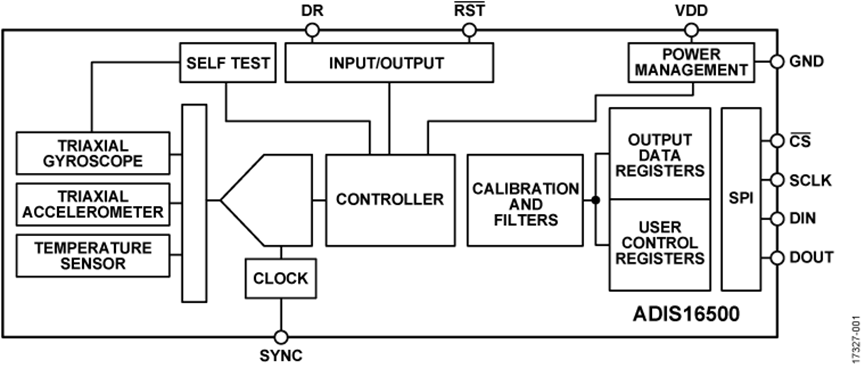
由ADI推出的ADIS16500是一款精密的微型微機電系統慣性測量單元,它包括一個三軸陀螺儀和一個三軸加速度計。ADIS16500中的每個慣性傳感器均結合了可優化動態性能的信號調節功能。工廠校準可表現每個傳感器的靈敏度、偏置、對準、線性加速(陀螺儀偏置)和沖擊點(加速度計位置)。因此,每個傳感器都有動態補償公式,用于在各種條件下提供準確的傳感器測量。
ADIS16500提供了一種簡化且經濟高效的方法,用于將精確的多軸慣性檢測技術集成到工業系統中,尤其是在與離散設計所涉及的復雜性和投資進行比較時。所有必要的運動檢測和校準均已在工廠生產過程中完成,大大縮短了系統集成時間。在導航系統中,緊密的正交對準簡化了慣性坐標系對準。串行外設接口(SPI)和寄存器結構設有一個簡單接口,用于數據收集和配置控制。
ADIS16500內置的三軸數字陀螺儀具有±2000°/sec的動態范圍,運行偏置穩定性為8.1°/小時,x軸和y軸角度隨機游走為0.29°/√小時,1 σ,軸間錯位誤差為±0.25°;內置三軸數字加速計的動態范圍為±392 m/s2,運行偏置穩定性為125 μm/s2,支持三軸、角度增量和速度增量輸出,出廠前經過工廠校準靈敏度、偏置和軸向對準,校準溫度范圍為?10℃至+75℃。
ADIS16500支持SPI兼容數據通信,以及可編程操作和控制、自動和手動偏置校正控制,還有用于同步數據采集的數據就緒指示器,支持直接、縮放和輸出的外部同步模式,以及慣性傳感器按需自檢、閃存按需自檢,采用3.0 V至3.6 V單電源供電(VDD),具有19,600 m/sec2機械沖擊生存能力,可在?25℃至+85℃的溫度范圍工作,ADIS16500采用100球的球柵陣列(BGA)封裝,尺寸約為15 mm × 15 mm × 5 mm。ADIS16500可應用于導航、穩定和儀器儀表、無人和自動駕駛車輛、智能農業和建筑機械、工廠/工業自動化、機器人、虛擬/增強現實、運動物聯網(IoMT)等。
結語
IMU是AMR定位的必備元器件,因為IMU可以提供方向估計和運動跟蹤,并以高刷新速率提供實時響應,使得AMR能夠在動態環境中行駛。借助卡爾曼濾波器等傳感器融合技術,可以組合其他傳感器模塊來彌補彼此的局限性。ADI提供豐富多樣的IMU,將可滿足各種移動機器人應用的特定要求。
-
傳感器
+關注
關注
2564文章
52668瀏覽量
764305 -
機器人
+關注
關注
213文章
29537瀏覽量
211773 -
AMR
+關注
關注
3文章
456瀏覽量
30872 -
IMU
+關注
關注
6文章
340瀏覽量
46531
原文標題:【技術干貨】利用IMU增強機器人定位與實現精確導航
文章出處:【微信號:艾睿電子,微信公眾號:艾睿電子】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄






 工商網監
工商網監
評論