 MATLAB環境下Delat并聯機器人simulnik + solidworks聯合仿真(終)
MATLAB環境下Delat并聯機器人simulnik + solidworks聯合仿真(終)

源碼鏈接
[https://download.csdn.net/download/a_zxswer/18855549]
聯合仿真
Matlab和SW聯合進行Delta機器人建模仿真,把SW模型導入Matlab中,生成仿真模型。
首先,根據Matlab版本下載Simscape Multibody Link安裝文件,例如本次設計我下載的便是smlink.r2019a.zip與install_addon.m文件。
之后,用管理員權限打開Matlab,工作空間定位剛下載兩個安裝文件的位置;在命令行窗口中輸入install_addon('smlink.r2019a.win64.zip'),進行解壓安裝文件,回車鍵確定;繼續在命令行界面中輸入regMatlabserver,回車鍵確認。
最后,激活Matlab和SolidWorks的接口,在命令行窗口界面輸入smlink_linksw,回車鍵確認,彈出連接成功的窗口,完成在Matlab中的配置。
圖4.10 導入成功文件列表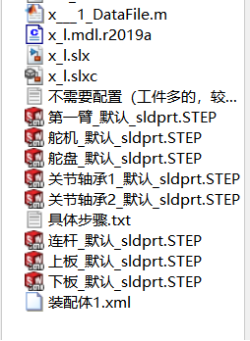
圖4.11 Simulink建立的Delta機器人模型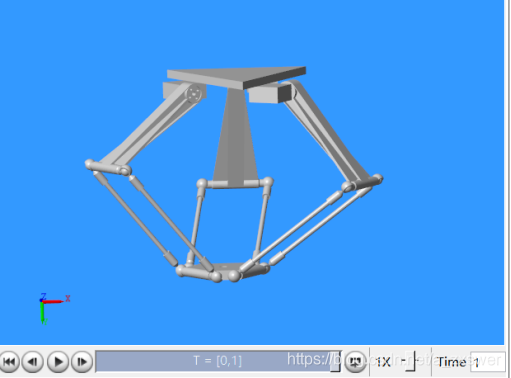
SW軟件自動可以搜索電腦的接口文件,打開SW軟件,Tools-Add-Ins-other Add-ins-Simscape Multibody Link打上勾并確認。選擇Tools-Simscape Multibody Link-Export-Simscape Multibody選一個文件位置執行完成。回到Matlab,工作空間定位到導入模型并存有xml文件的文件的位置。在命令行窗口輸入smimport('裝配體.xml'),等待執行結果,如圖4.10所示,彈出Simulink頁面,并且生成派生的文件Delta機器人的機械模型已經轉成了Simulink模型直接顯示了出來,運行顯示導入模型如圖4.11所示,為導入成功的Delta機器人模型。下次打開只需要運行派生文件x_1_DataFile.m,即初始化導入模型的參數,之后便直接可以在Simulink中運行,實現模型建立和仿真。至此,聯合建模成功,下面對Delta機器人進行動作仿真。
圖4.12 Delta機器人仿真設計模塊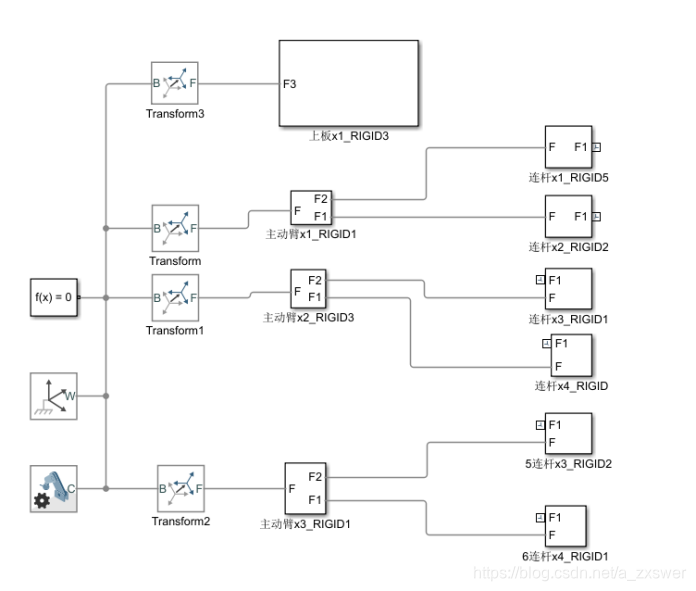
如圖4.12所示,是在Simulink中設計的仿真模塊,如圖4.13所示的Delta機器人仿真運行界面,實現下抓、上抬動作的仿真。下面Delta機器人仿真動作的設計步驟。
第一步,運行派生的m文件,初始仿真參數;
第二步,在求解器中,建立世界坐標系,在Y軸方向設置重力,線性代數方式配置為自動,選取時間為基準的方程公式;
第三步,上板、主動臂的坐標系轉換,采用任意軸的旋轉方式,笛卡爾的偏量平移方式,其中軸的選取、旋轉的角度、笛卡爾偏移量等參數具體數值使用的是派生文件初始化的數值;
第四步,顯示上板、主動臂實體模型;
第五步,把轉動副轉動角度設置為180度,經過計算調試,設計各個連桿的坐標系轉換參數;
第六步,顯示連桿實體模型;
第七步,運行仿真模塊,實現Delta機器人下抓上抬動作仿真。
圖4.13 Delta機器人仿真運行界面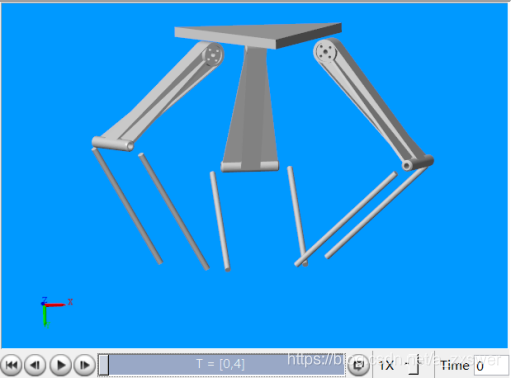
仿真方式對比分析
本次設計分別使用Matlab、SolidWorks兩款軟件對Delta機器人進行三種方式進行仿真,下面對三種方式分別解決的各種問題以及優缺點的做出了分析。
第一種方式,在Matlab軟件中,使用m文件建模Delta機器人,完成動態模擬門行軌跡運動。優點:簡化機器人的結構;易于寫入運動學正反解算法;易于對不同的運動姿態和軌跡進行編程,完成對比仿真。缺點:忽視了Delta機器人從動臂的具體架構。
第二種方式,在SolidWorks中進行設計Delta機器人裝配體,生成CAD圖紙,進行動畫模擬運動。可調試設計機器人機械模型可執行的位置姿態,驗證設計圖紙的可運動性,進行運動學特征分析,提供正反解分析理論依據。
第三種方式,Matlab、SolidWorks聯合仿真建立Simscape模型進行仿真,對機器人下抓上抬動作進行了模擬仿真,進一步完善了上兩種方式對從動臂的動作特點的分析。這種方法優勢在于,創建動態系統模型,并提供一個建立模型方塊圖的圖形用戶接口(GUI);以一種更快捷、直接明了的方式進行模型和運動分析,立即看到系統的仿真結果;缺點:編程復雜,加入運動學正反解算法操作難度大。
仿真運動規劃
在機器人運動學設計中,運動規劃又稱運動插補,是在給定的路徑端點之間插入用于控制的中間點序列從而實現沿給定的平穩運動。
空間角度上的路徑規劃和時間角度上的軌跡規劃構成了機器人運動學上的運動規劃,是進行并聯機器人運動分析必不可少的設計環節,兩者存在遞進和相輔相成的關系。
首先,必須通過分析Delta機器人的幾何架構以及關節特征;進而,求出機器人的工作空間;最終,才能進行路徑規劃的設計。在暫不考慮機器人位姿參數隨時間變化的因素的情況下,連接起點位置和終點位置的有序坐標點,構成的曲線稱之為路徑,構成路徑的方法稱之為路徑規劃[31]。路徑是Delta并聯機器人整體位置和運動姿態的一定序列,即各個關節和機械架構的空間坐標節點,其目的是找到一系列要經過的有界限的路徑點,到達期望位置;我認為還應該考慮具體的機器人的機械特性和進行受力分析,設計運動關節和動力臂的路徑關鍵運動節點處的平滑過渡,減少摩擦力和減少對伺服電機力矩和加速度過大的損傷,也是對下一步驟的軌跡規劃提前進行大框架的優化。而軌跡規劃是增加路徑的一個時間參數,賦予運動的連續性和實時性。
本次設計,通過對Delta機器人的機械架構特征以及各個關節及各力臂之間的自由度分析,進行門行路徑規劃程序的編寫,并完成了對門行軌跡規劃的仿真。
自動分揀程序示意圖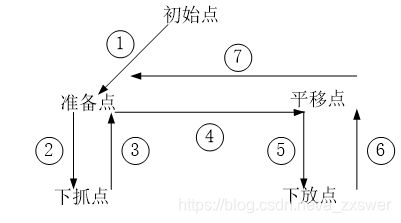
以上就是Delta機器人自動分揀的部分程序,經過多次試驗,選擇適合的參數,保證抓取的準確性、動作的合理性。
小結
介紹SolidWorks、Matlab軟件,詳述了在Matlab、SolidWorks和聯合兩種環境的Delta機器人動態仿真以及三種不同的仿真方式進行對比。
審核編輯 黃宇
-
matlab
+關注
關注
189文章
3001瀏覽量
234128 -
機器人
+關注
關注
213文章
29748瀏覽量
212888 -
仿真
+關注
關注
52文章
4289瀏覽量
135869 -
solidworks
+關注
關注
7文章
705瀏覽量
26507
發布評論請先 登錄
盤點#機器人開發平臺
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產品
樂聚機器人與地瓜機器人達成戰略合作,聯合發布Aelos Embodied具身智能

阿童木高速重載并聯機器人效能拉滿
名單公布!【書籍評測活動NO.58】ROS 2智能機器人開發實踐
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
翼菲并聯機器人通過MTBF 20000小時認證
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
【「具身智能機器人系統」閱讀體驗】+初品的體驗


勃肯特機器人新品首發!混合運動型機器人性能突破引爆關注





 工商網監
工商網監
評論