") 基于高光譜遙感的水體濁度反演與模型構(gòu)建
基于高光譜遙感的水體濁度反演與模型構(gòu)建

濁度是水環(huán)境監(jiān)測的重要水質(zhì)參數(shù),與懸浮物之間具有緊密聯(lián)系,是用來估計懸浮物質(zhì)量的關(guān)鍵。實時、快速監(jiān)測礦區(qū)周邊地表水水質(zhì)是防止礦區(qū)水環(huán)境污染的前提。傳統(tǒng)的水質(zhì)監(jiān)測手段主要通過實地定點采樣、實驗室理化分析的形式獲取水質(zhì)參數(shù),在一定程度上能排除環(huán)境干擾,對水質(zhì)指標做出較為精準的評價,但采樣間隔較長、樣本點分布稀疏,且耗時費力,難以完成全面實時的地表水水質(zhì)狀況監(jiān)測。遙感技術(shù)具有時效性強、低成本和場景監(jiān)測能力,可實現(xiàn)大區(qū)域水體的快速監(jiān)測,反映研究區(qū)水質(zhì)的時空變化特征。但衛(wèi)星觀測能力易受天氣、時空分辨率等限制,難以及時進行有效監(jiān)測。
近年來,無人機技術(shù)飛速發(fā)展,以無人機為飛行平臺搭載高光譜傳感器,可低空作業(yè),具有獲取數(shù)據(jù)分辨率高、光譜信息豐富等優(yōu)勢,可在一定程度上彌補衛(wèi)星遙感對水體監(jiān)測的不足。
基于國內(nèi)諸多研究的基礎(chǔ),聯(lián)合無人機高光譜數(shù)據(jù)與地面實測光譜數(shù)據(jù)、水質(zhì)參數(shù)數(shù)據(jù),采用相關(guān)性分析法選取最優(yōu)波段,分析光譜指數(shù)與水體水質(zhì)參數(shù)的定量關(guān)系,構(gòu)建反演模型,并應(yīng)用于無人機高光譜影像,生成礦區(qū)水體濁度空間分布圖,實現(xiàn)范圍性地表水水質(zhì)監(jiān)測。
01數(shù)據(jù)獲取與處理
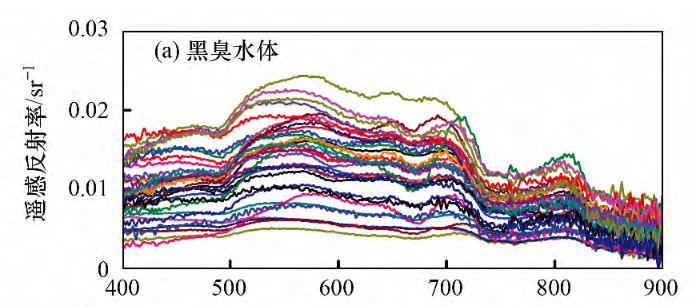
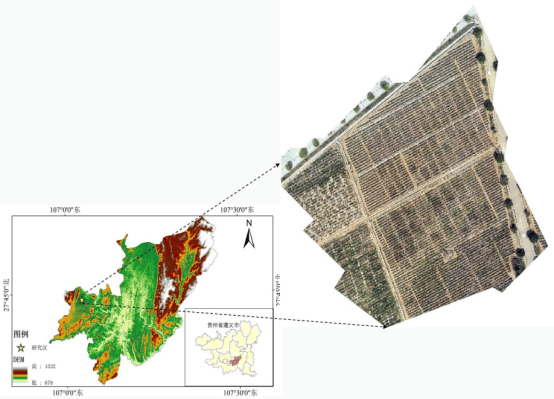
采用大疆為搭載平臺,搭載機載高光譜,通過高光譜成像系統(tǒng)進行數(shù)據(jù)傳輸與獲取。根據(jù)任務(wù)要求合理規(guī)劃攝區(qū)航線,利用航跡規(guī)劃子系統(tǒng)將規(guī)劃的航線數(shù)據(jù)載入空中控制系統(tǒng),然后按照航線數(shù)據(jù)進行拍攝。拍攝數(shù)據(jù)將通過無線電實時傳輸?shù)降孛婵刂葡到y(tǒng)。為準確掌握研究區(qū)水體情況,在研究區(qū)水域范圍內(nèi)均勻隨機選取20個采樣點,采集采樣點處光譜數(shù)據(jù)、水樣,并及時完成水質(zhì)參數(shù)測定。水面樣本點光譜數(shù)據(jù)采集使用背攜式ASD光譜輻射儀,光譜響應(yīng)范圍為350~2500nm,光譜分辨率為1nm。無人機搭載傳感器獲取的光譜范圍是380~1000nm,為確保采樣光譜與無人機高光譜波長范圍一致,選用實測采樣點光譜350~1000nm數(shù)據(jù)。部分水體光譜曲線如圖1所示,水體實測光譜曲線基本符合標準水體反射光譜曲線,水體反射率較低,遠低于其他大多數(shù)地物,水體在藍綠波段具有較強反射,在其他可見光波段吸收較強。
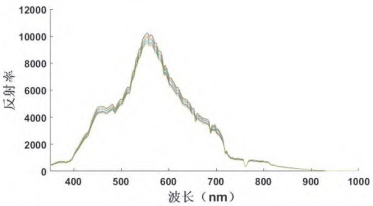
圖1部分樣本點水體光譜曲線
02研究方法
為選擇與水體參數(shù)濁度值高度相關(guān)的最優(yōu)波段,采用相關(guān)性分析法,使用采樣點光譜數(shù)據(jù)構(gòu)建光譜歸一化差值指數(shù),計算NDSI與采樣點水質(zhì)參數(shù)濁度值的相關(guān)性,選取相關(guān)性最高的波段組構(gòu)建水質(zhì)反演模型,并以決定系數(shù)R2與均方根誤差RMSE作為精度評價標準,評定反演模型預(yù)測精度,選取最優(yōu)反演模型,應(yīng)用于無人機高光譜數(shù)據(jù),實現(xiàn)水質(zhì)參數(shù)反演的空間可視化。
引入均方根誤差作為驗證反演模型精度的指標,通過計算樣本點實測水質(zhì)濁度值與不同反演模型預(yù)測值之間的均方根誤差,分析不同反演模型的預(yù)測精度,進而選取最優(yōu)模型。均方根誤差計算公式為:

公式(3)中,xmea為采樣點實測水質(zhì)濁度值,xest為模型反演預(yù)測值,n為樣本點總數(shù)。
03結(jié)果分析
為檢驗所構(gòu)建反演模型的預(yù)測精度,對比采樣點實測濁度值與反演模型預(yù)測值,結(jié)果如圖3所示。采樣點實測濁度值與反演模型預(yù)測值較均勻地分布在1∶1線性附近,即模型預(yù)測值與實測值接近,模型預(yù)測結(jié)果可用于實際監(jiān)測需求。經(jīng)對比驗證,反演模型預(yù)測結(jié)果具有較高精度,可用于無人機高光譜影像,進行研究區(qū)水體濁度參數(shù)的范圍性監(jiān)測,獲取水體濁度空間可視化分布成果。
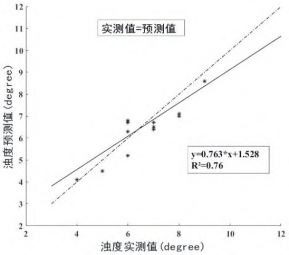
圖3水體濁度實測值與預(yù)測值對比
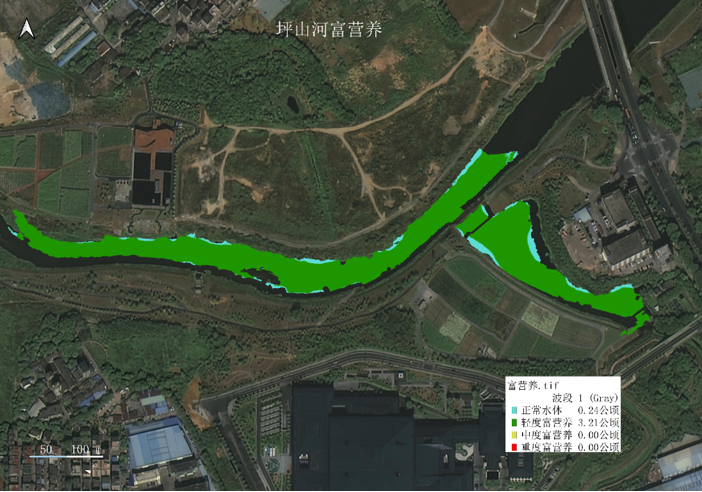
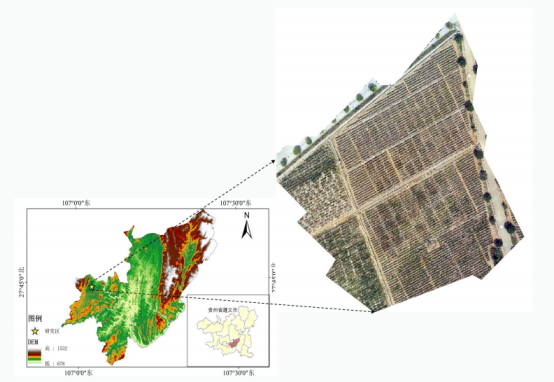
基于采樣點實測光譜與濁度值數(shù)據(jù)構(gòu)建反演模型,滿足反演精度需求,結(jié)合同時期獲取的無人機高光譜數(shù)據(jù)實現(xiàn)全域水體的濁度反演,并繪制水體濁度值空間分布圖,如圖4所示。研究區(qū)水體濁度值為0~45度,其中78%范圍水域濁度值為9~18度,水邊緣區(qū)域約有12%范圍濁度值達到20~45度。結(jié)果表明,該區(qū)域水體整體較為清澈,懸浮物濃度較低,濁度值較小,無明顯污染現(xiàn)象,而水域邊界處反演模型預(yù)測結(jié)果濁度值較高,與實際調(diào)研結(jié)果一致。
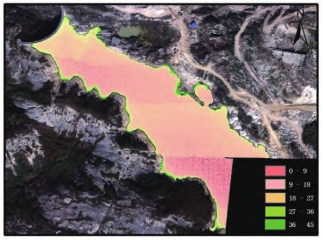
圖4研究區(qū)水域濁度空間分布
04結(jié)論
結(jié)合實測樣本點光譜數(shù)據(jù)、水體濁度,采用相關(guān)性分析方法選取與濁度相關(guān)較高的最優(yōu)波段,構(gòu)建反演模型。經(jīng)最優(yōu)波段分析發(fā)現(xiàn),當波段為540、625nm,歸一化差值指數(shù)與水體濁度具有最大相關(guān)性,數(shù)值為0.762,因此基于波段(540、625nm)構(gòu)建反演模型。為檢驗?zāi)P途龋瑢Ρ饶P皖A(yù)測值與實測值發(fā)現(xiàn),樣本點位置水體濁度值與反演模型預(yù)測值均勻分布在1∶1線性附近,反演精度較高。同時將反演模型應(yīng)用于無人機高光譜影像,實現(xiàn)地表水體濁度的范圍性監(jiān)測,分析水體濁度,實現(xiàn)數(shù)據(jù)空間化與可視化。
研究利用無人機實時監(jiān)測、高空間分辨率的能力,對于地表水污染監(jiān)測預(yù)警具有重要意義。隨著研究的深入,基于豐富的光譜信息可進一步開展水體懸浮物濃度、CHL-a濃度以及有機物污染等方面的監(jiān)測分析,為地表水水質(zhì)監(jiān)測與環(huán)境保護提供技術(shù)支持。
推薦:
便攜式高光譜成像系統(tǒng)iSpecHyper-VS1000
專門用于公安刑偵、物證鑒定、醫(yī)學醫(yī)療、精準農(nóng)業(yè)、礦物地質(zhì)勘探等領(lǐng)域的最新產(chǎn)品,主要優(yōu)勢具有體積小、幀率高、高光譜分辨率高、高像質(zhì)等性價比特點采用了透射光柵內(nèi)推掃原理高光譜成像,系統(tǒng)集成高性能數(shù)據(jù)采集與分析處理系統(tǒng),高速USB3.0接口傳輸,全靶面高成像質(zhì)量光學設(shè)計,物鏡接口為標準C-Mount,可根據(jù)用戶需求更換物鏡。
審核編輯 黃宇
-
遙感
+關(guān)注
關(guān)注
0文章
252瀏覽量
17170 -
高光譜
+關(guān)注
關(guān)注
0文章
417瀏覽量
10313
發(fā)布評論請先 登錄
高光譜相機如何通過無人機實現(xiàn)地表精準遙感?

無人機多光譜遙感技術(shù)在城市黑臭水體監(jiān)測中的應(yīng)用 ——高效識別與動態(tài)管控的新方案
高光譜低空遙感技術(shù)在水環(huán)境監(jiān)測中的應(yīng)用—從泥沙量化到污染動態(tài)追蹤
光譜成像技術(shù)賦能河湖水環(huán)境監(jiān)測-富營養(yǎng)化、藻類水華、黑臭水體、岸線生態(tài)
水色遙感精細化:地物光譜儀在水生態(tài)系統(tǒng)監(jiān)測中的典型應(yīng)用
國產(chǎn)地物光譜儀在“高光譜-機器學習”模型構(gòu)建中的表現(xiàn)

當花粉“肉眼可見”:高光譜遙感技術(shù)如何破解城市過敏難題?

光譜成像相機和光譜視頻監(jiān)控在水環(huán)境中的應(yīng)用
基于高光譜的辣椒葉片SPAD反演研究
浙大、微信提出精確反演采樣器新范式,徹底解決擴散模型反演問題

基于無人機高光譜遙感的河湖水環(huán)境探測
常見的遙感數(shù)據(jù)類型有哪些
基于無人機多光譜遙感的棉花生長參數(shù)和產(chǎn)量估算
基于高光譜遙感數(shù)據(jù)的辣椒葉片葉綠素含量反演
從哪些角度選擇高光譜遙感成像光譜儀?這些廠家比較有實力!





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論