 空中小精靈:用 Raspberry Pi Pico 2 打造你的個人無人機!
空中小精靈:用 Raspberry Pi Pico 2 打造你的個人無人機!


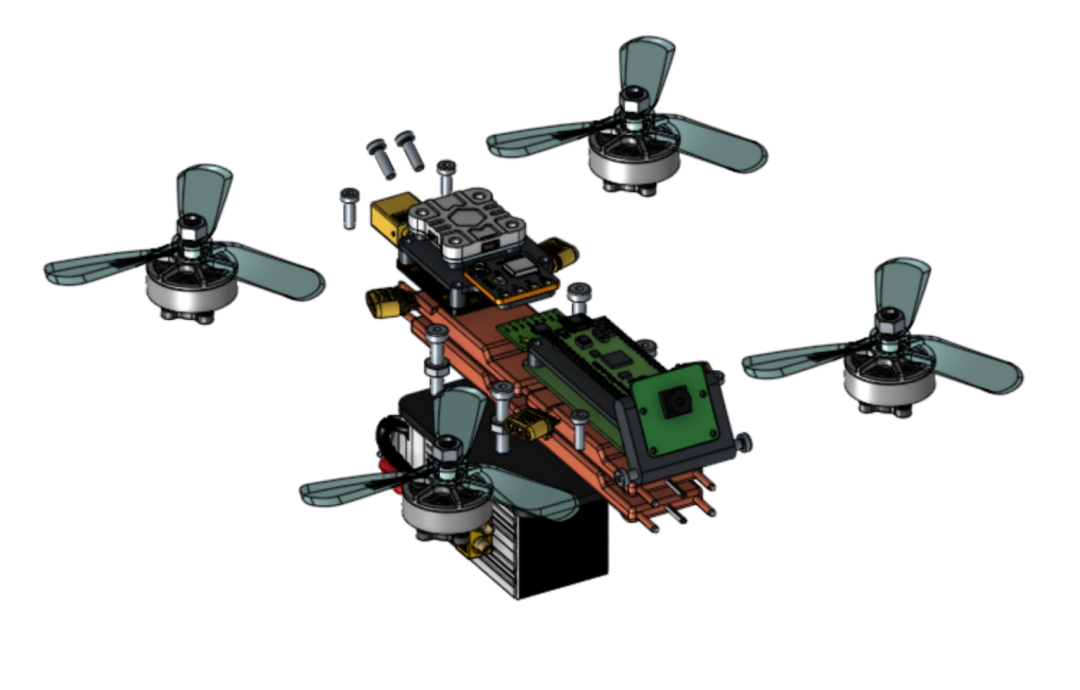
3D打印的CAD設計
定制無人機的打造之旅始于CAD軟件設計。我的初步設計是完全3D打印的,具有封閉結構和懸臂式支撐臂,用于承受點力。蜂窩狀蓋子提供了冷卻效果,而封閉外殼則允許嵌入XT-60和MR-30連接器,呈現出整潔且一體化的外觀。在內部,我確保所有電氣組件都牢固安裝,以避免不必要的移動,這些移動可能會破壞飛行的穩定性。

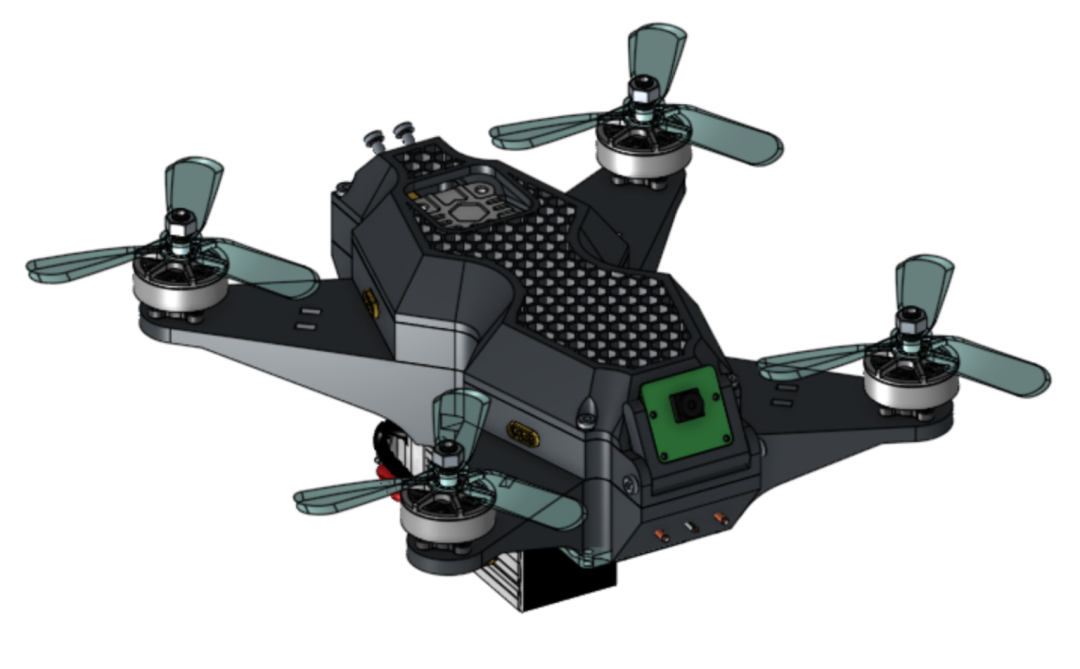
測試很快顯示,3D打印的框架很脆弱,經常在撞擊時斷裂。此外,我的打印機構建區域的限制意味著電機位置非常擁擠。為了解決這些問題,我使用CNC技術從4毫米碳纖維材料上切割出一個新的框架,增大了輪距以提高穩定性。我使用Carveco軟件生成刀具路徑,并在我們創客實驗室的WorkBee CNC上切割框架。兩個小時后,我就擁有了一個堅固且已組裝好的框架,準備安裝電子設備。
不是一臺,不是兩臺,而是三臺Raspberry Pis
對于無人機的“大腦”,我使用Raspberry Pi Pico 2連接MPU6050陀螺儀來獲取實時方向數據,并使用IBUS協議接收器來簡化控制輸入。最初,由于處理五個單獨的PWM信號存在延遲,我遇到了信號處理方面的問題。切換到IBUS后,循環頻率提高了十倍,從而大大改善了飛行響應。Pico負責處理用于穩定性的PID(比例-積分-微分)計算,而一個4合一ESC則管理電機信號。此外,無人機還搭載了一臺Raspberry Pi Zero,配備Camera Module 2和一個模擬VTX,用于實時第一人稱視角(FPV)飛行。
編程基于Tim Hanewich的Scout飛行控制器代碼,實現了使用PID值來維持所需角速度的“速率”模式控制器。精細調整PID增益至關重要;設置不當可能導致不穩定和危險的振蕩。我遵循了一個仔細的調整過程,從每個參數的較低值開始,然后慢慢增加。

為了使過程更安全,我構建了一個測試裝置來隔離每個軸并模擬飛行條件。這使我能夠在進行實際飛行測試之前實現粗略的調整,最終確保了無人機的安全和穩定性能。
-
無人機
+關注
關注
231文章
10817瀏覽量
186520 -
Raspberry Pi
+關注
關注
2文章
620瀏覽量
23096
發布評論請先 登錄
低空物流:無人機開啟未來配送新篇章
晶科鑫晶振守護無人機全場景運行
無人機高速公路巡檢系統:守護道路安全的空中管家
無人機消防巡檢系統守護城市安全
無人機巡檢系統守護未來的空中衛士
《手把手教你做星閃無人機—KaihongOS星閃無人機開發實戰》系列課程課件匯總
工業無人值守無人機充電連接解決方案

舵機在無人機中的作用
Raspberry Pi Pico 2 W 發布
DIY了一臺無人機,用全志T113芯片
無人機行業相機的新標桿:SONY ILX-LR1






 工商網監
工商網監
評論