 實現“AI+”關鍵突破,剖析人形機器人里的關鍵技術和未來趨勢
實現“AI+”關鍵突破,剖析人形機器人里的關鍵技術和未來趨勢
電子發燒友網報道(文 / 吳子鵬)2025 年,全球 AI 與機器人產業正站在歷史性的轉折點上。在技術不斷迭代以及政策大力支持的雙重驅動下,人形機器人這一先進的產品形態正從實驗室逐步邁向工廠、醫院乃至家庭,勢必深刻改變人類社會的運行模式。
在《人形機器人的電機控制和傳感器》專題中,瑞薩電子嵌入式處理器事業部高級經理劉濤在接受電子發燒友網采訪時表示,人形機器人被譽為 “人工智能 +” 的重要突破口。從結構組成來看,人形機器人主要由驅動、感知、控制三大系統構成,而芯片則是這三個系統的核心所在。在人形機器人的關節電機驅動以及傳感融合等關鍵領域,瑞薩電子提供了豐富多樣的解決方案。

瑞薩電子嵌入式處理器事業部高級經理劉濤
瑞薩電子在人形機器人控制和驅動方面的布局
在人形機器人中,上述三大系統各自發揮著關鍵作用。具體表現如下:?
驅動系統:驅動位置決定了不同驅動器的需求,不同的電機類型也對應著不同算法,常見的有 FOC 算法等。
控制系統:人形機器人需要執行復雜多變的動作,其自由度越來越高,對周圍環境的響應速度也越來越快。從平穩行走到精準抓取,再到維持平衡,背后離不開高精度的運動控制算法、快速響應的通信接口、靈活的網絡拓撲、更多的電機驅動器,以及能夠支撐算法和算力的控制芯片,以此確保機器人動作流暢且精準。
感知系統:人形機器人需借助多種傳感器(如視覺傳感器、力傳感器、陀螺儀等)來感知環境,并對這些傳感器信號進行高效采集、處理與融合。
劉濤指出,針對上述需求,瑞薩正在加速布局。首先,針對機器人手臂關節驅動,瑞薩電子推出了已量產的 RZ/T2M、RZ/T2L 或者 RZ/N2L 系列產品。該系列產品不僅支持 EtherCAT 網絡通信,還配備了專用的絕對值編碼器接口,如 BiSS、Endat、Hiperface 等,以及增量式編碼器接口,可滿足電機位置信息捕獲需求,支持 2 個或更多編碼器接口。此外,還有豐富的電機外設接口,如 PWM、ADC、Delta - sigma 接口等。這些高度集成的芯片能夠最大限度減少 PCB 布線,特別契合機器人手臂的小型化設計目標。?
目前,圍繞 RZ/T2L 等系列產品,瑞薩電子在伺服電機驅動方面已積累了大量成功案例。同時,瑞薩也正計劃開發基于下一代 RA8 M85 內核 MCU 的人形機器人關節驅動解決方案。屆時,客戶可基于瑞薩的參考設計,快速部署原型機并投入量產,相關硬件原理圖、軟件例程、底層驅動等資料都將免費提供給客戶參考。
針對多個自由度的機器手臂控制,瑞薩電子已量產 RZ/T2H MPU。該芯片集成了四個高性能的 Cortex - A55 核和兩個實時控制 Cortex - R52 核,具備強大的應用處理能力與實時性能。它不僅能夠實現對多達 9 軸工業機器人電機的高速、高精度實時控制,為機器人賦予強大的運動控制能力及網絡通信能力,支持工業以太網的主從協議,還能在單芯片上支持包括時間敏感網絡 TSN 和工業以太網在內的各種網絡通信,使人形機器人能夠與外部設備實現高效通信與協同工作。除 RZ/T2H 外,瑞薩電子還以每年超 15 款的 MCU 和 MPU 新產品量產上市的研發速度,持續縱橫雙向拓展產品布局,以滿足未來更復雜的人形機器人及其他應用需求。
瑞薩電子在人形機器人感知和傳輸方面的布局?
前文提到了人形機器人感知系統的基本構成,視覺傳感器、觸覺傳感器、慣性測量單元(IMU)、六維力傳感器為人形機器人提供了多維度的感知能力,使其能夠更好地與環境交互并執行復雜任務。下面來分析一下感知系統的作用:它是人形機器人環境感知與信息輸入的端口,能夠實時采集環境的三維數據,構建動態空間模型,幫助機器人識別障礙物、地形特征及物體位置,提供全面的環境信息輸入;它也是人形機器人人機交互的基礎,使機器人能夠感知接觸壓力、溫度等,實現與人類的輕柔互動,并可識別人體動作、面部表情及語音指令,增強服務場景下的自然交互能力。
針對傳感器融合與處理方面,瑞薩電子同樣提供了一系列解決方案。為助力人形機器人實現領先的視覺感知能力,瑞薩電子通過旗下高性能的 MCU 和 MPU 支持視覺傳感器的數據處理,從而確保復雜圖像信息能夠被高效且精準地捕獲。例如,瑞薩電子提供的具有高算力的四核視覺 AI 微處理器 - RZ/V2H,采用 DRP - AI3(動態可重配置處理器)加速器和高性能實時處理器,具備高算力、低功耗的特性,無需冷卻風扇,即可滿足處理復雜的實時物體識別及推理任務,非常適合機器人應用所需的動態計算以及實時處理性能。
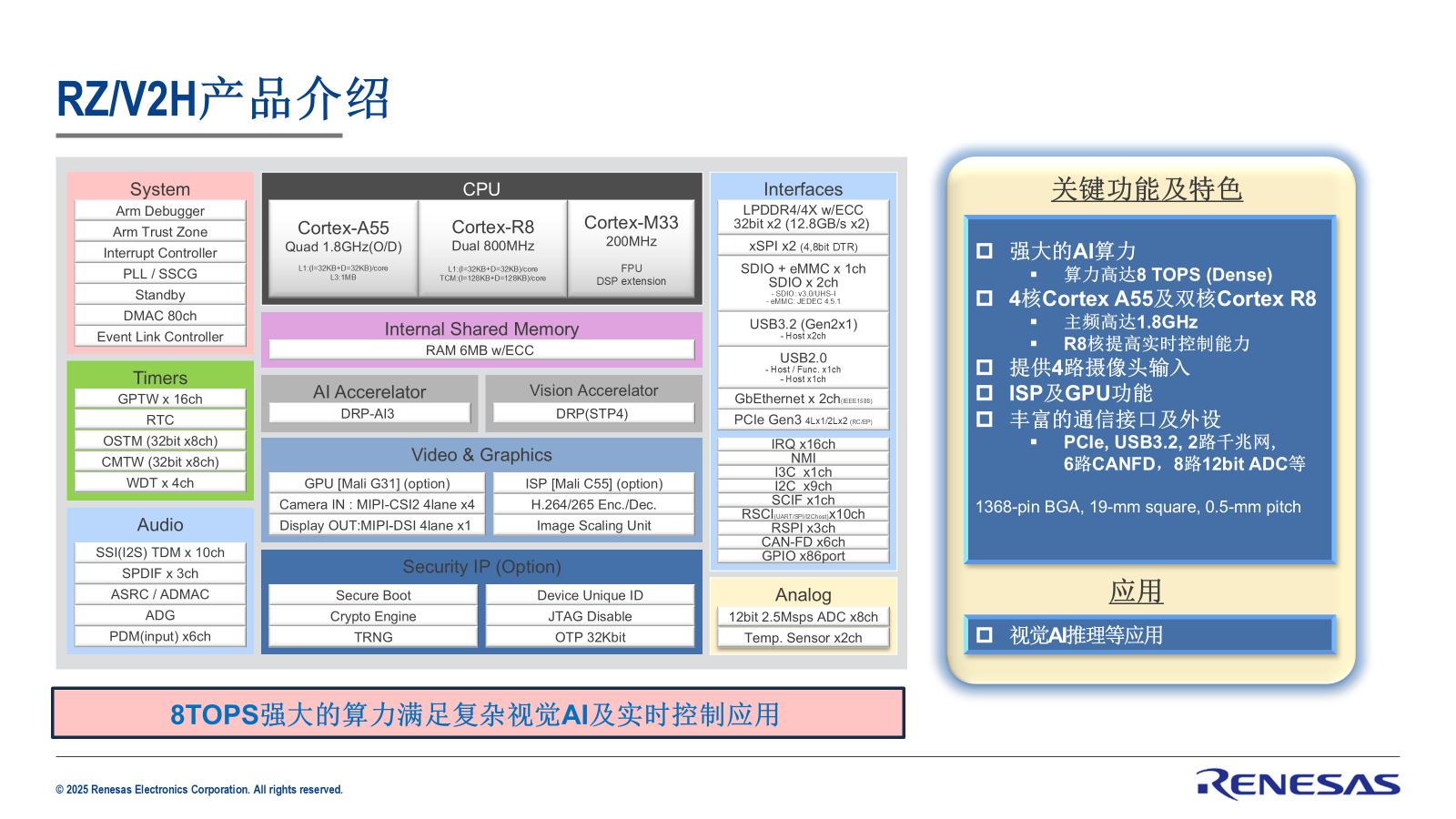
RZ/V2H介紹
在 AI 算法上,瑞薩電子專注于視覺識別的 AI 應用層面。比如,在 RZ/V2H 上集成了瑞薩電子獨創的 AI 加速器 DRP - AI(動態可重配置處理器),可提供高達 8TOPS(緊密模型)的算力及高達 10TOPS/W 的極佳 AI 能效。其低功耗特性無需冷卻風扇,非常適合人形機器人電池供電,能最大限度提高效率,延長機器人的工作時間。
在傳感融合和處理方面,瑞薩電子還提供集成高精度 AFE 前端的 RX23E MCU,能夠為高精度的傳感器提供完整的感知能力。不僅如此,瑞薩電子還提供傳感器部件中的模擬芯片,用于調節溫度、速度、位置、配電等。此外,為實現傳感器數據的高效處理和融合,瑞薩具備強大計算能力和豐富模擬外設的 RA 系列 MCU 和 RZ 系列 MPU,能夠支持復雜的傳感器融合算法。結合深度學習技術,瑞薩電子的解決方案能夠在端點設備上運行先進的傳感器融合算法,助力系統實現快速決策推斷。
在傳感融合算法方面,瑞薩電子擁有專為非視覺感應設計的先進信號處理方法,用于數學計算、端側部署。例如,瑞薩的 Reality AI 平臺工具使用 SVM(支持向量機,Support Vector Machines)和 NN(神經網絡,Neural Network)作為模型的基本算法,其獨具特色的探索特征空間的算法,可用于區分不同類別、預測變量或檢測異常等不同應用,擁有多項技術專利,能夠幫助開發者在云端構建專屬的 AI 模型,并在本地邊緣節點上完成部署。
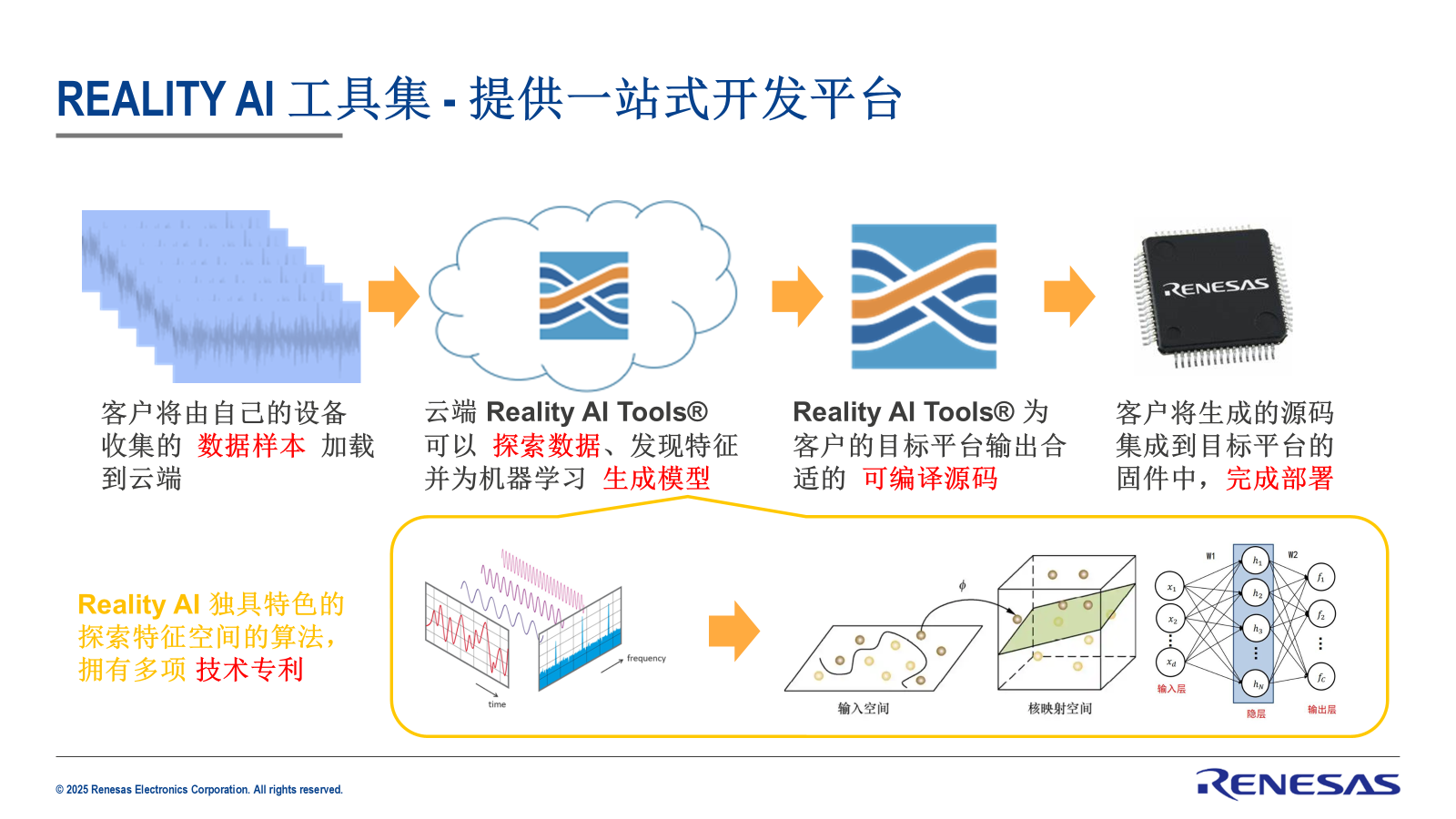
Reality AI平臺工具
最后,無論是控制、驅動,還是感知,這些信號都需要傳輸。傳統電機方案通信接口較為單一,而人形機器人變得越來越復雜且精確,這就要求在設計時配備一個快速、實時性強的通信系統,該系統需支持不同關節之間高速帶寬的數據傳輸,并且在空間受限的環境中,對器件的要求尤為苛刻。?
針對高效的信號傳輸需求,瑞薩電子推出的 RZ/T2x、RZ/N2x 系列家族 MPU 均能夠實現 EtherCAT 的網絡通信,帶寬高達 1000Mbps,通過多路復用可實現各種 3x EtherCAT、2x EtherCAT + 1x Ethernet 或者 3x Gigabit TSN 等多種不同的以太網協議配置,為機器人的網絡通信提供靈活的網絡拓撲。另外,瑞薩電子還全面支持 TSN 下一代千兆工業網絡,內置的千兆 TSN(基于 IEEE802.1Q 開發的一套協議標準)交換機,并搭配內置的千兆 MAC,支持時間同步 (802.1 AS - 2020, 802.1 AS - Rev)、數據調度和流量整形(Qbv)和幀搶占(Qbu/Qbr)等 TSN 協議族,以實現數據在同一網絡的實時、確定性傳輸,實現人形機器人關節之間無縫的確定性協調,改善人形機器人關節作為一個子系統的實時決策和多個電機之間的同步、協調任務。?
除此之外,瑞薩電子旗艦產品 RZ/T2H 還配備了高性能多核處理器、高精度三相 PWM 定時器、用于測量電流值的 Δ - Σ 接口和多種編碼器接口,以及編碼器接口(支持 A - format?、EnDat、BiSS?、Hyperface DSL 和 FA - CODER),可實現對多達 9 軸工業機器人電機的高速、高精度控制。
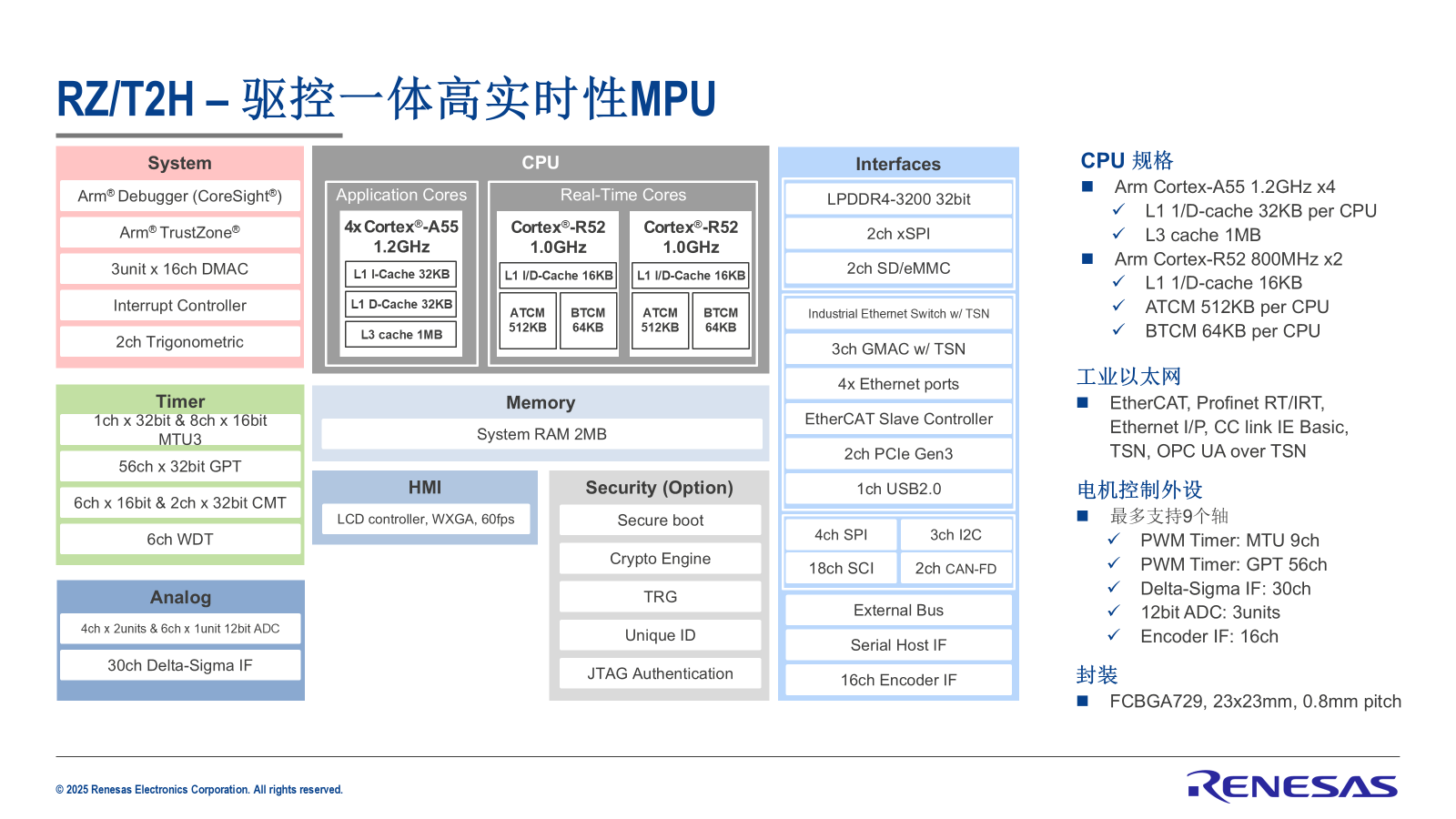
RZ/T2H系統框圖
人形機器人的技術趨勢和瑞薩電子的應對之策?
美國高盛集團去年預測,到 2035 年,人形機器人的潛在市場規模預計將達到 380 億美元,屆時人形機器人出貨量將更多、成本將更低、盈利速度將更快。然而,目前眾多從業者認為這份預測過于保守。繼計算機、智能手機和新能源汽車之后,人形機器人被視作新一代具有顛覆性的智能終端,有望形成新的萬億元級別市場。那么,現階段人形機器人技術發展呈現怎樣的趨勢呢?劉濤圍繞電機驅動和傳感應用分別進行了解讀。
在人形機器人領域,電機控制技術正朝著更高精度與響應速度的方向發展。隨著應用場景的不斷拓展,機器人需要在復雜環境中完成高精度任務,例如抓取易碎物品或進行微創手術輔助。這就要求電機控制能夠精確調節扭矩和位置,同時具備快速響應能力,以實現自然流暢的運動。此外,高度集成化與小型化也是電機控制的重要發展趨勢。?
為滿足人形機器人對空間和重量的嚴格要求,未來電機控制硬件將更加緊湊,將電機、通信、驅動器、編碼器和控制器等集成在一起,形成高度集成的關節模塊,減少布線和連接部件,以提高系統的可靠性和緊湊性。在這個過程中,芯片是實現這些性能的核心基礎,高性能的微控制器(MCU)和數字信號處理器(DSP)等多核異構組合,構成了高性能處理能力與實時控制的硬件架構,能夠針對不同的應用場景,賦能相應的 CPU 內核快速處理復雜的電機控制算法,憑借豐富的電機外設,支持高精度的位置、速度和扭矩控制,內置的高速以太網控制器提供確定性的網絡通信保障。以上不同的功能特性集成在一顆小小的芯片上,為機器人不同部件的協作、執行任務奠定堅實基礎。最后,先進的、小型化的芯片封裝技術,也為人形機器人的集成化和小型化設計提供了有力支撐。
在傳感技術方面,多模態感知融合是重要的發展趨勢。人形機器人將通過融合視覺、觸覺、聽覺等多種傳感器數據,實現更全面的環境感知和理解。不可忽視的是,在這一過程中需要有專用芯片進行信號采集、處理和控制,包括模擬芯片、圖像處理芯片、圖像傳感器芯片等。?
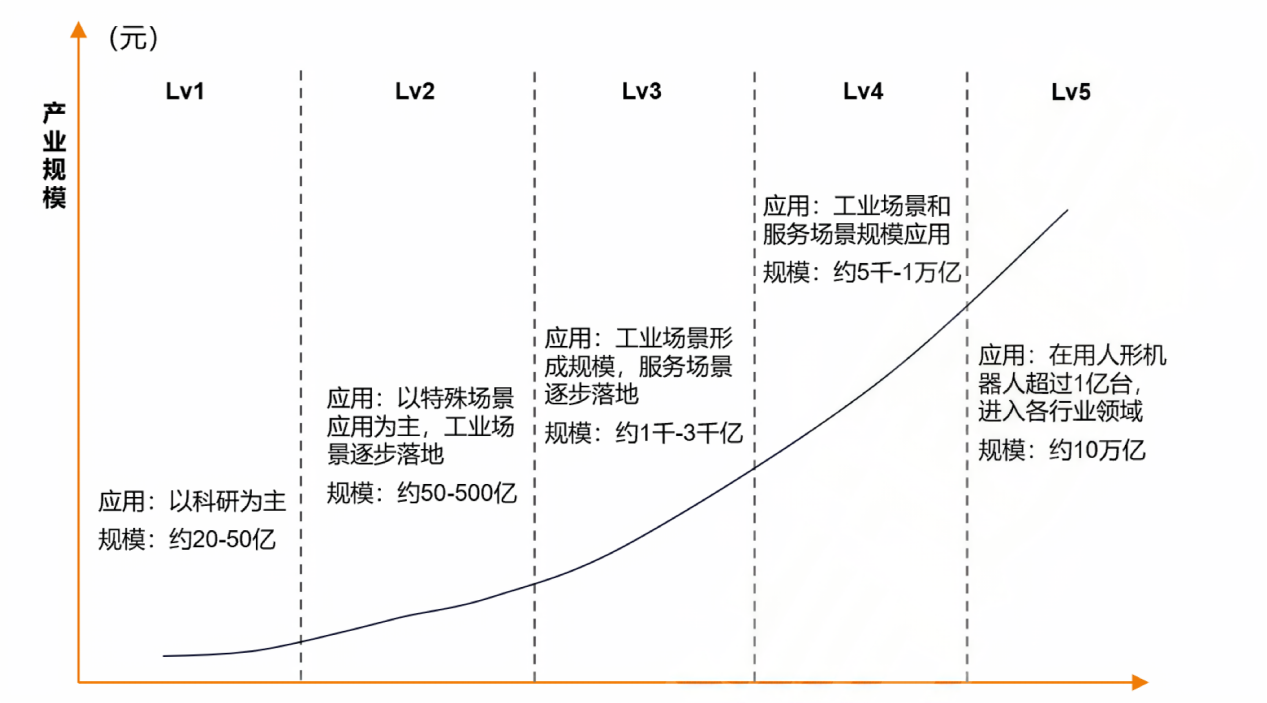
人形機器人的發展歷經多個階段,從早期簡單的機械構造與基礎功能,逐步演進到如今高度智能化、多功能集成的形態。現階段,全球人形機器人產業已正式步入產業化落地階段。劉濤指出,從初期來看,人形機器人以基礎移動能力為核心研發,關鍵技術包括動態平衡控制和能耗優化,應用場景主要集中在物流搬運和巡邏安防。隨著技術的不斷成熟,人形機器人將逐步向更高級的階段邁進,感知能力、認知能力和交互能力的提升將成為未來發展的重點。在機器人逐步升級的過程中,芯片產業也將迎來機遇與挑戰。
作為人形機器人的 “大腦”,高性能、低功耗的芯片將是推動其智能化、自主化進程的關鍵。隨著人形機器人對環境感知、決策制定、運動控制等能力需求的日益增長,主控芯片、傳感芯片、AI 芯片和邊緣計算芯片等的定制化需求會顯著增加。與此同時,能源效率成為芯片設計的重要考量因素。鑒于人形機器人需要長時間持續工作,且往往受限于電池容量,因此低功耗設計也將成為人形機器人芯片研發的關鍵要點。
面對廣闊的市場機遇,瑞薩將憑借深厚的技術積累,特別是在嵌入式處理、電源管理和模擬電路方面的專長,開發針對人形機器人特定需求的定制化芯片解決方案。通過優化芯片架構,提升計算效率與能源管理水平,為人形機器人提供持久且高效的動力支持。此外,瑞薩還將加強與機器人制造商、AI 算法開發商及系統集成商的合作,共同推進人形機器人的智能化、自主化進程,確保產品能夠契合不斷變化的市場需求和行業標準。
-
AI
+關注
關注
87文章
33200瀏覽量
273431 -
人形機器人
+關注
關注
4文章
611瀏覽量
17179
發布評論請先 登錄
相關推薦
人形之外,AI機器人的多元未來
邁來芯:憑借汽車芯片經驗,為人形機器人發展添磚加瓦
人形機器人設計中,哪些關鍵部位需要功率器件?典型電壓/電流參數如何設計?
短訊:全球首個!人形機器人技術新突破
具身智能照進現實,物理 AI 解人形機器人量產困局
肇觀電子賦能人形機器人視覺技術革新
伺服電動缸在人形機器人中的應用
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
江智公司持續沉淀增強機器人產業關鍵技術核心競爭力

王耀南院士:AI大模型賦能人形機器人及未來趨勢
大模型助陣,人形機器人打工潮來了?






 工商網監
工商網監
評論