") 芯科科技新型藍牙信道探測開發(fā)板的設計示例
芯科科技新型藍牙信道探測開發(fā)板的設計示例
在藍牙信道探測(Channel Sounding)應用中,設計方案始終都應考慮添加第二根天線。正如Silicon Labs(芯科科技)發(fā)布的低功耗藍牙(Bluetooth LE)信道探測天線指南文檔-AN1493: Antenna Design Guidelines for BLE Channel Sounding中所顯示的,即使在外形尺寸受限的情況下,添加第二根天線也是可行的,并且有助于大幅提高位置精確度。
我們最新推出的EFR32xG24 -DK2606A藍牙信道探測開發(fā)板提供了一個基于最佳實踐的設計示例,在不到33 x 33毫米的外形尺寸下支持兩根天線。其外形尺寸本身比最終產品要大,因為藍牙信道探測開發(fā)板在板上配備了完整的調試電路。
BRD2606藍牙信道探測評估平臺簡介
本篇博客中的所有測試均使用藍牙信道探測開發(fā)套件BRD2606進行,因為它是一個功能極為多樣的藍牙信道探測評估平臺。考慮以下關鍵特性:
雙天線支持的最佳實踐實施,遵循所有已發(fā)布的指南。
可選擇使用紐扣電池供電運行。
小封裝適合用于原型設計,并且便于在空間受限的環(huán)境中進行安置。
通過板載電路提供板載調試和終端輸出功能。
綜合該開發(fā)板帶來上述特性,以及芯科科技符合SIG標準、支持藍牙信道探測功能的6.0協(xié)議棧、具備量產品質的發(fā)起端和反射端示例應用、諸如天線啟用等高度可配置的性能特性,再通過Simplicity Studio的藍牙信道探測分析器GUI相結合時,芯科科技開發(fā)人員以及客戶便擁有了同樣強大可靠的平臺,可用于進行廣泛的評估。
我們將BRD2606設計成類似鑰匙扣的外形規(guī)格,但這種設計同樣適用于資產追蹤的應用場景。對于任何具備低功耗藍牙功能且能從某種形式的定位感知中受益的系統(tǒng)而言,藍牙信道探測都是一項極具吸引力的增值功能。借助這塊小巧的開發(fā)板,我們期待看到開發(fā)人員能夠發(fā)掘出藍牙信道探測的創(chuàng)新性應用,這些應用將超出藍牙技術聯盟目前所強調的應用場景范疇。
開始藍牙信道探測應用之旅
獲取有關我們新型雙天線板的更多信息:https://cn.silabs.com/development-tools/wireless/efr32xg24-channel-sounding-dev-kit
這篇博客文章中的大部分數據都來自我們的天線指南文檔,我們鼓勵所有剛接觸藍牙信道探測的人閱讀該文檔:https://www.silabs.com/documents/public/application-notes/an1493-antenna-design-guidelines-for-ble-channel-sounding.pdf
我們還在docs.silabs.com上提供了性能指標,以及我們藍牙信道探測庫的完整API規(guī)范:https://docs.silabs.com/rtl-lib/8.2.0/rtl-lib-channel-sounding-getting-started/
期待廣大的開發(fā)者們在未來的開發(fā)周期中,為我們的信道探測解決方案推出新功能并加以改進。在此過程中,我們會對性能進行優(yōu)化調整,通過優(yōu)化RF空中傳輸時間和算法執(zhí)行時間來最大限度地降低電流消耗,同時提升準確性和穩(wěn)定性。
下面我們來討論一下核心規(guī)范6.0究竟是如何將使用多根天線進行標準化的。
多天線設計助力信道探測達到0.5米目標精度
當藍牙信道探測被納入藍牙核心規(guī)范6.0版本的一部分時,藍牙技術聯盟(Bluetooth SIG)提出了在大多數場景下實現0.5米目標精度的要求。這一精度目標帶來了一大挑戰(zhàn),因為在大多數情況下,如果不使用多個天線,要可靠地達到0.5米精度是很困難的,甚至是不可能的。設備與設備之間的相對方位、人體、環(huán)境中的障礙物,以及多徑干擾,這些因素共同作用,限制了利用藍牙信道探測進行單天線測距的可靠性。
藍牙信道探測是一個雙向測距過程,發(fā)起方和反射方會依次發(fā)送和接收信號及數據包,這一事實使得上述挑戰(zhàn)變得更加艱巨。兩端在功能上相當對稱,尤其是與藍牙測向(Direction Finding)技術相比時更是如此,因為藍牙測向技術在兩個端點之間定義了多種功能和天線要求方面的不對稱性。由于藍牙信道探測具有對稱性,因此兩個通信端點都必須了解彼此的天線功能和切換模式,以便準確采集數據、進行分析并確定相對距離。
如同任何新功能一樣,藍牙信道探測的目標在于實現互操作性。將解決方案標準化,使其在手機與手機之間、設備與設備之間能夠“即插即用”,這為產品設計師提供了他們在全球范圍內進行產品部署所需的保障。要通過多個天線實現這種“即插即用”功能,唯一的方法是將天線的使用方式與藍牙信道探測的其他流程一同進行標準化。
盡管這項技術的其他方面被認為處于領先地位且具有開創(chuàng)性,但對于藍牙信道探測而言,在可控范圍內實現天線切換的靈活標準化同樣至關重要。這一特性確保了藍牙信道探測能夠兌現其在實現穩(wěn)健精度的同時最大化互操作性的承諾。
為何應該設計配備多個天線的產品
當兩個無線設備的天線調諧到同一頻率,并且其電路板之間視線通暢和/或具備足夠的功率以穿透環(huán)境中的所有材質和干擾源進行信號接收時,這兩個設備之間的通信效果最為理想。墻壁以及包括人體、地板、天花板在內的障礙物,還有其他RF信號,都可能對兩個天線之間的通信能力產生不利影響。
此外,天線之間的相對朝向也可能引發(fā)問題。在配備可移動、電池供電的物聯網設備的環(huán)境中,設備A的天線相對于設備B的天線的朝向是無法控制或預測的。不幸的是,某些朝向會產生與頻率相關的零值點,并導致信號幅度嚴重衰減。如果兩臺物聯網設備相互之間的擺放角度和距離恰好處于某種情況,它們將無法進行通信。
在基于低功耗藍牙連接的異步連接導向邏輯(ACL)傳輸通信中,這些零值點往往會導致數據包重傳,甚至可能造成連接中斷。在藍牙信道探測中,其影響可能更為微妙。來自PBR測量的IQ數據會出現相位信息失真的情況,這會在距離估計算法中引入誤差。
擁有多個天線朝向的設備能夠從不同的天線朝向,針對同一信道交換基于相位的數據,這增加了獲取描述該信道的無失真IQ數據的可能性。
無失真的IQ數據能夠實現高度精確的距離估算,從而帶來更優(yōu)質的終端解決方案。
信道探測天線切換的工作原理
在天線切換方面,藍牙核心規(guī)范6.0標準化了三種基本方式。
功能交換
模式2(Mode 2)基于相位的測距操作
IQ數據結構交換
在功能交換過程中,連接中的外圍設備會對一個請求做出響應,表明它能夠使用的天線最大數量,以及它能夠支持的天線路徑數量。天線路徑正如其字面意思那樣:即電路板A的天線與電路板B的天線進行通信所經過的路徑。由于電路板設計或內存限制,一些設備可能無法支持多個天線路徑。
在流程開始之前,控制器會選擇一種配置,并將其傳達給反射方,以便雙方能相互了解天線路徑數量和天線配置情況。
在使用模式2基于相位測距的藍牙信道探測步驟中,發(fā)起方會按照反射方已知的模式,通過每個天線路徑在信道上發(fā)送單音信號。然后,反射方會在相同的信道上,沿著相同順序的天線路徑發(fā)送單音信號。
在發(fā)起方運行的藍牙信道探測算法會保存該信道上所有特定于天線路徑的IQ數據,但在得出距離之前,它還需要反射方對應的IQ數據。
在從反射方向發(fā)起方檢索數據的過程中(該過程通過LE ACL連接實現),IQ數據需要按照預定義的數據結構進行傳輸。該數據結構也被定義為測距配置文件的一部分,該配置文件在核心規(guī)范更新幾個月后采用。
芯科科技通過運行在EFR32xG24上的藍牙信道探測解決方案,支持上述所有功能。我們的藍牙協(xié)議棧已通過認證,符合6.0的要求,并且我們對測距配置文件的實現已具備認證條件。所有這些功能都可以使用BRD2606進行評估。
單天線設計的測試結果
并非所有的設計都能遵循每一項設計最佳實踐。電路板或成本方面的限制可能會迫使一項設計只能使用單根天線。距離估計算法的可靠性可能會降低,但即便如此,這些設備仍然符合藍牙信道探測的條件。在僅使用一條天線路徑的情況下運行,即設備A和設備B都僅有一條天線路徑,這仍然是一個可行的設計選擇。
下面的測試是在辦公室環(huán)境中進行的,這種環(huán)境會產生反射和多徑干擾。測試是使用BRD2606進行的,但每個開發(fā)板僅使用一根天線,從而形成一條天線路徑。
在這八次測試運行中,兩塊開發(fā)板相距11米,并且其中一塊開發(fā)板進行了旋轉,以使兩塊開發(fā)板上的天線處于同極化或交叉極化狀態(tài)。

在這項測試中,交叉極化天線表現出了最佳效果,測量誤差通常在+/-2米以內。同極化天線的表現更差,大多數結果顯示誤差在+/-3米或更大。
請注意,這種性能仍然遠比嘗試使用RSSI來測量距離可靠得多,在藍牙信道探測被采用之前,RSSI是唯一可用的標準化距離估算方法。
如下圖所示,當啟用BRD2606開發(fā)板上的兩根天線,形成最多4條天線路徑時,測量結果會可靠得多,大多數測量的誤差都能很好地控制在1米以內。請注意,在這些測試中,同極化測試案例是使用兩塊處于相同水平方向的BRD2606開發(fā)板進行的,而交叉極化測試則是在一塊開發(fā)板垂直放置、另一塊開發(fā)板水平放置的情況下執(zhí)行的。

至少有一個設備支持雙天線的設計方案
藍牙信道探測的許多應用往往遵循“定位器(Locator)”/“標簽(Tag)”模式。在這些情況下,定位器端通常是固定不動的,且尺寸較大,但可能會面臨設備共存方面的挑戰(zhàn),以及與其他天線在電路板空間占用上的競爭問題。
標簽端很可能是可移動的,其尺寸限制可能甚至比鑰匙扣的外形尺寸還要小,這使得它難以支持雙天線。對于這些情況,我們認為在固定的“定位器”端支持兩根或更多天線至少還是有些好處的。
下面的圖表展示了三組數據集,這些數據是通過旋轉一塊僅激活單根天線的BRD2606收集而來的,該開發(fā)板與另一塊激活了兩根天線的2606相距10米。在一塊開發(fā)板旋轉時所估算的大多數距離中,我們看到誤差約在+/- 1米左右,但也存在一些明顯的異常值。
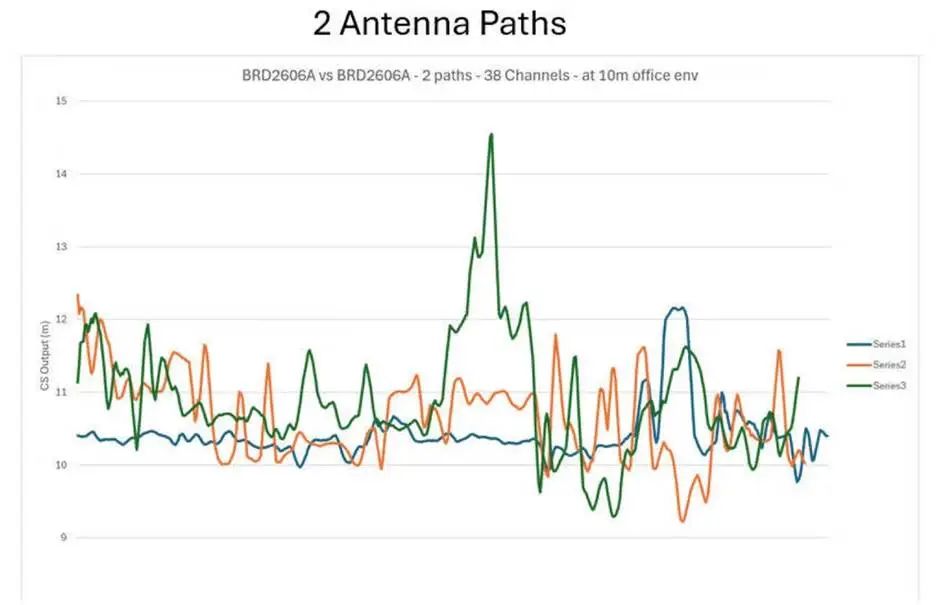
雖然這看起來可能令人擔憂,但重要的是,對于特定的應用,始終要考慮達到何種程度的可靠性和準確性才算足夠好。例如,安裝在一個面積為2-4平方米的智能貨盤上、用于在倉庫空間內進行追蹤的追蹤器,可能不需要與汽車的無鑰匙進入和無鑰匙啟動應用相同級別的精度。
通過啟用第二塊開發(fā)板上的第二根天線,形成四條天線路徑,可使性能得到以下顯著提升,三次測試運行的所有結果的精度都在0.5米以內。

為什么不始終使用四條天線路徑?
如上述結果和其他測試所示,無論開發(fā)板的擺放方向和環(huán)境狀況如何,四條天線路徑都能更可靠地提供準確的數據。了解詳細測試數據:https://www.silabs.com/documents/public/application-notes/an1493-antenna-design-guidelines-for-ble-channel-sounding.pdf
然而在某些情況下,使用四條天線路徑是不可行的。如前一部分所述,電路板的限制因素可能會限制設計方案所能使用的天線數量。其他因素包括對能耗和更新速率的限制,或者對RF占用空中時間的考量。
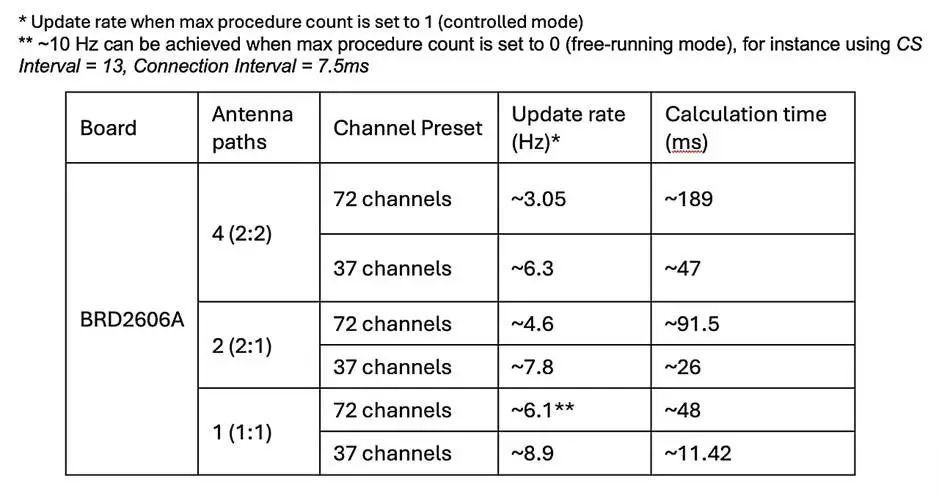
使用多根天線會增加在信道探測的三個階段所花費的時間:
在PBR測距過程中,隨著更多天線路徑被啟用,多天線支持會增加每個步驟的持續(xù)時間。
在將IQ 數據從反射方傳輸到主機的過程中,多條天線路徑的IQ 數據會增大通過LE ACL 傳輸的數據結構的大小。
在處理過程中,由多條天線路徑生成的數據會導致距離估算算法的執(zhí)行時間呈指數增長。
下表顯示了更新速率以及距離估算算法(SiSDK中的24Q4-GA)的執(zhí)行時間,這些數據是所使用天線數量的函數。我們還改變了信道間隔設置,使其在1 MHz間隔(72個信道)和2 MHz間隔(37個信道)之間變化,以便展示除了天線數量之外,其他因素是如何對更新速率和處理時間產生顯著影響的。
-
天線
+關注
關注
70文章
3267瀏覽量
141978 -
藍牙
+關注
關注
116文章
6035瀏覽量
173191 -
開發(fā)板
+關注
關注
25文章
5530瀏覽量
102356 -
芯科科技
+關注
關注
1文章
414瀏覽量
16037
原文標題:新型藍牙信道探測開發(fā)套件-支持雙天線,大幅提高目標精度
文章出處:【微信號:SiliconLabs,微信公眾號:Silicon Labs】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
芯科科技:藍牙6.0出手即“王炸”,市場戰(zhàn)略升級

使用愛芯派Pro開發(fā)板部署人體姿態(tài)估計模型

為什么藍牙信道探測將引領高精度定位服務?
基于芯科科技xG28開發(fā)板運行藍牙和Sub-GHz動態(tài)多協(xié)議的范圍測試
從藍牙協(xié)議棧視角探索信道探測

芯科科技專家分享信道探測新應用
藍牙信道探測技術與應用論壇順利舉辦
芯科科技信道探測解決方案
藍牙信道探測概念、應用及發(fā)展趨勢
芯科科技助力藍牙Mesh設備開發(fā)





 工商網監(jiān)
工商網監(jiān)
評論