") 無(wú)人駕駛解決方案包含哪些方面?感知、決策與控制
無(wú)人駕駛解決方案包含哪些方面?感知、決策與控制
?在人工智能與物聯(lián)網(wǎng)技術(shù)飛速發(fā)展的今天,無(wú)人駕駛已經(jīng)從實(shí)驗(yàn)室走向現(xiàn)實(shí)應(yīng)用場(chǎng)景。然而,一個(gè)真正成熟的無(wú)人駕駛解決方案絕非單純依靠幾項(xiàng)核心技術(shù)就能實(shí)現(xiàn),而是需要構(gòu)建一個(gè)涵蓋硬件設(shè)施、軟件系統(tǒng)、網(wǎng)絡(luò)通信、數(shù)據(jù)處理、安全機(jī)制、商業(yè)模式以及配套政策等多方面的完整生態(tài)體系。本文將全面剖析無(wú)人駕駛解決方案的各個(gè)組成部分,特別聚焦5G網(wǎng)絡(luò)在其中扮演的關(guān)鍵角色,以期為行業(yè)發(fā)展提供系統(tǒng)性的思考框架。
無(wú)人駕駛技術(shù)架構(gòu)層:感知、決策與控制
先進(jìn)傳感器融合體系無(wú)人駕駛車輛的感知系統(tǒng)是整個(gè)解決方案的基礎(chǔ),必須能夠在各種復(fù)雜環(huán)境下準(zhǔn)確感知周圍狀況。一個(gè)完善的感知系統(tǒng)通常包括以下多種傳感器技術(shù)的深度融合:激光雷達(dá)(LiDAR)提供毫米級(jí)精度的三維空間數(shù)據(jù),能夠精確捕捉周圍物體的形狀、距離和運(yùn)動(dòng)狀態(tài)。高端無(wú)人駕駛系統(tǒng)通常會(huì)配置多個(gè)激光雷達(dá),形成360度無(wú)死角覆蓋。目前行業(yè)領(lǐng)先的固態(tài)激光雷達(dá)已經(jīng)將成本降至千元級(jí)別,解決了早期機(jī)械式激光雷達(dá)價(jià)格昂貴、可靠性不足的問題。
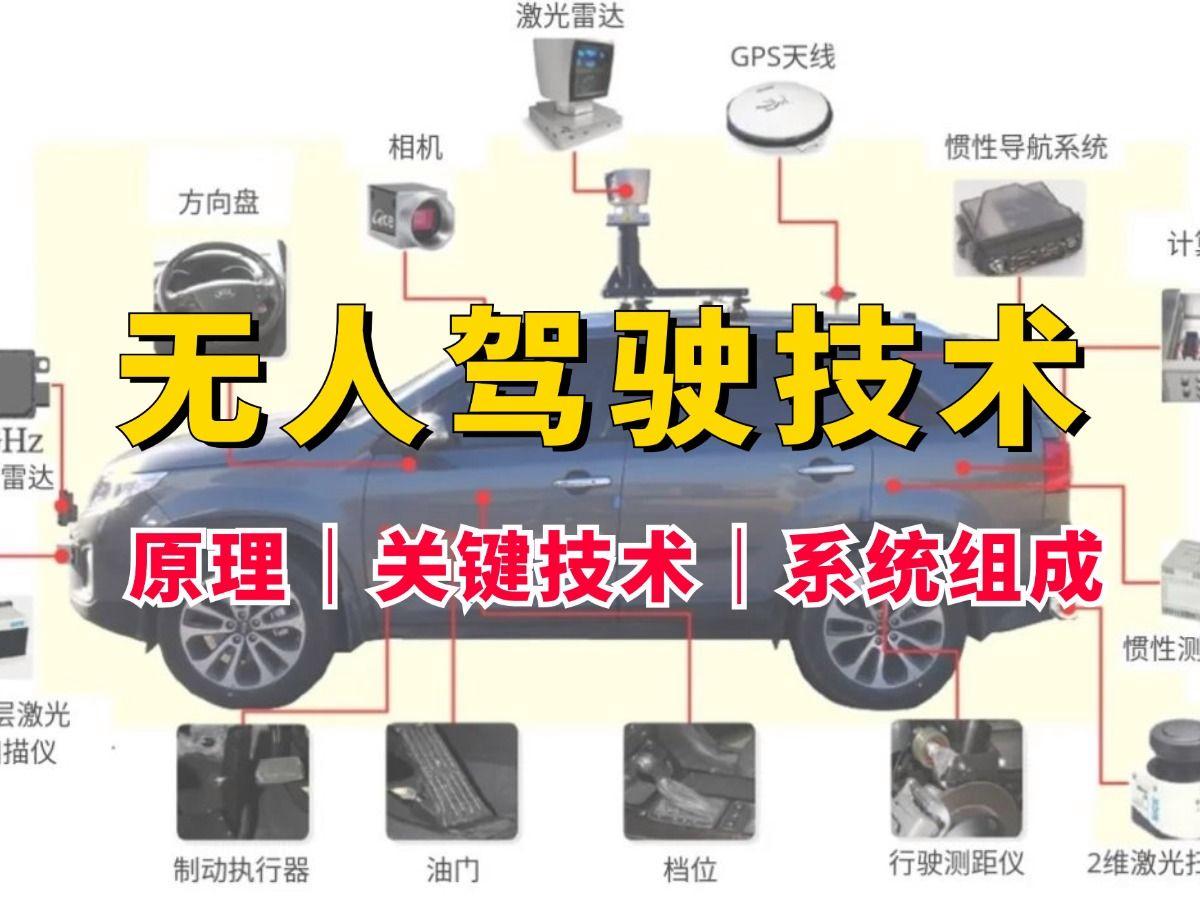
毫米波雷達(dá)具有全天候工作能力,可以穿透霧、雨、雪等惡劣天氣條件,為無(wú)人駕駛提供可靠的距離測(cè)量和障礙物檢測(cè)。新一代4D成像雷達(dá)不僅可以測(cè)量距離和速度,還能提供目標(biāo)高度信息和更精細(xì)的分辨率。高清攝像頭系統(tǒng)負(fù)責(zé)捕捉豐富的視覺信息,包括交通標(biāo)志、信號(hào)燈、車道線以及道路使用者的行為特征。先進(jìn)的立體視覺系統(tǒng)通過(guò)多個(gè)攝像頭的協(xié)同工作,可以實(shí)現(xiàn)精確的深度感知和三維重建。特殊光譜相機(jī)(如紅外相機(jī))則能在夜間或光線不足的環(huán)境下提供清晰圖像。超聲波傳感器和環(huán)視攝像頭在低速場(chǎng)景下提供精確的近距離感知能力,特別適用于自動(dòng)泊車和窄路行駛等場(chǎng)景。這些傳感器產(chǎn)生的原始數(shù)據(jù)量極為龐大,一輛配備完整感知系統(tǒng)的無(wú)人駕駛車輛每秒可能產(chǎn)生超過(guò)10GB的原始數(shù)據(jù)。

如此海量數(shù)據(jù)的實(shí)時(shí)處理和傳輸對(duì)計(jì)算平臺(tái)和通信網(wǎng)絡(luò)提出了極高要求。AI決策引擎與控制系統(tǒng)決策與控制系統(tǒng)是無(wú)人駕駛的"大腦"與"神經(jīng)中樞",負(fù)責(zé)處理感知數(shù)據(jù)并轉(zhuǎn)化為精確的行動(dòng)指令。一個(gè)完整的決策控制系統(tǒng)包括以下核心組件:環(huán)境感知與理解模塊將多傳感器數(shù)據(jù)融合處理,構(gòu)建統(tǒng)一的環(huán)境模型,識(shí)別道路、車輛、行人等交通要素,并理解其語(yǔ)義關(guān)系和行為意圖。最先進(jìn)的感知理解系統(tǒng)已經(jīng)能夠預(yù)測(cè)其他交通參與者的行為軌跡,為決策提供前瞻性信息。路徑規(guī)劃算法基于目的地和實(shí)時(shí)路況,規(guī)劃全局最優(yōu)路徑,并能根據(jù)道路擁堵、施工等突發(fā)情況動(dòng)態(tài)調(diào)整。局部路徑規(guī)劃則處理車道變換、超車、轉(zhuǎn)彎等具體駕駛場(chǎng)景的軌跡生成。
行為決策系統(tǒng)根據(jù)交通規(guī)則和道路禮儀,在各種復(fù)雜場(chǎng)景下做出合理決策,如何時(shí)變道、是否讓行、如何應(yīng)對(duì)交警指揮等。先進(jìn)的決策系統(tǒng)已經(jīng)開始應(yīng)用強(qiáng)化學(xué)習(xí)和博弈論模型,可以在不確定環(huán)境中做出更符合人類駕駛習(xí)慣的決策。控制執(zhí)行系統(tǒng)將高層決策轉(zhuǎn)化為具體的加速、制動(dòng)和轉(zhuǎn)向指令,精確控制車輛按照規(guī)劃軌跡行駛。現(xiàn)代控制系統(tǒng)通常采用預(yù)測(cè)控制模型(MPC),能夠根據(jù)車輛動(dòng)力學(xué)特性和道路條件優(yōu)化控制策略,實(shí)現(xiàn)平順舒適的駕駛體驗(yàn)。為支持這些復(fù)雜算法的實(shí)時(shí)運(yùn)行,車載計(jì)算平臺(tái)通常采用高性能芯片組合,如NVIDIA的Drive Orin(高達(dá)254 TOPS算力)或特斯拉自研的FSD芯片(高達(dá)144 TOPS算力),配合專用AI加速器和高效的冷卻系統(tǒng),確保在嚴(yán)苛環(huán)境下的穩(wěn)定運(yùn)行。
5G網(wǎng)絡(luò)與通信層:無(wú)人駕駛的神經(jīng)系統(tǒng)

5G網(wǎng)絡(luò)技術(shù)賦能5G網(wǎng)絡(luò)憑借其三大技術(shù)特性(eMBB增強(qiáng)移動(dòng)寬帶、uRLLC超可靠低時(shí)延通信、mMTC海量機(jī)器類通信),成為無(wú)人駕駛落地的關(guān)鍵使能技術(shù)。具體來(lái)說(shuō),5G網(wǎng)絡(luò)在無(wú)人駕駛解決方案中的作用體現(xiàn)在以下幾個(gè)方面:超高帶寬傳輸支持環(huán)境感知數(shù)據(jù)的實(shí)時(shí)上傳與處理。5G的理論峰值下載速率可達(dá)20Gbps,上傳速率可達(dá)10Gbps,是4G網(wǎng)絡(luò)的10-100倍。這使得無(wú)人駕駛車輛可以實(shí)時(shí)上傳高清攝像頭和激光雷達(dá)數(shù)據(jù)到邊緣服務(wù)器或云端進(jìn)行處理,并快速接收處理結(jié)果。

例如,在復(fù)雜交通場(chǎng)景下,車輛可以將周圍360度高清視頻實(shí)時(shí)傳輸?shù)竭吘売?jì)算節(jié)點(diǎn),獲取更全面的場(chǎng)景理解支持。超低延遲通信確保關(guān)鍵指令的及時(shí)傳遞。5G網(wǎng)絡(luò)的端到端延遲最低可達(dá)1毫秒,遠(yuǎn)低于4G的20-100毫秒,這對(duì)于高速行駛的無(wú)人駕駛車輛至關(guān)重要。在時(shí)速100公里的情況下,1毫秒的延遲意味著車輛僅行駛約2.8厘米,而100毫秒的延遲則意味著行駛2.8米。在緊急避險(xiǎn)或突發(fā)事件處理時(shí),這種毫秒級(jí)的差異可能直接關(guān)系到安全。高可靠網(wǎng)絡(luò)保障確保在各種復(fù)雜環(huán)境中維持穩(wěn)定連接。5G網(wǎng)絡(luò)支持99.999%的可靠性,即使在高速移動(dòng)、隧道、高樓密集區(qū)等信號(hào)復(fù)雜環(huán)境中,也能保持穩(wěn)定連接。此外,5G網(wǎng)絡(luò)切片技術(shù)允許為無(wú)人駕駛應(yīng)用分配專用網(wǎng)絡(luò)資源,避免與其他業(yè)務(wù)競(jìng)爭(zhēng)帶寬,進(jìn)一步提升可靠性。大規(guī)模連接能力支持未來(lái)智慧交通整體部署。5G網(wǎng)絡(luò)可支持每平方公里100萬(wàn)臺(tái)設(shè)備的同時(shí)連接,為未來(lái)大規(guī)模部署無(wú)人駕駛車輛、智能路燈、路側(cè)單元等智能設(shè)備奠定基礎(chǔ),實(shí)現(xiàn)真正的智慧交通系統(tǒng)。5G工業(yè)CPE的核心價(jià)值在無(wú)人駕駛解決方案中,5G工業(yè)CPE(客戶前置設(shè)備)作為連接車輛與5G網(wǎng)絡(luò)的關(guān)鍵硬件,發(fā)揮著不可替代的作用。
高性能5G工業(yè)CPE通常具備以下核心特性:多頻段支持與智能天線技術(shù),確保在復(fù)雜電磁環(huán)境中獲得最佳信號(hào)質(zhì)量。先進(jìn)的5G工業(yè)CPE支持N1/N3/N5/N8/N28/N41/N77/N78/N79等多個(gè)5G頻段,配合4x4 MIMO和波束賦形技術(shù),大幅提升信號(hào)接收能力和抗干擾能力。高效信號(hào)轉(zhuǎn)換與網(wǎng)絡(luò)接口兼容性,實(shí)現(xiàn)5G網(wǎng)絡(luò)與車載系統(tǒng)的無(wú)縫對(duì)接。專業(yè)5G工業(yè)CPE通常提供千兆以太網(wǎng)接口、Wi-Fi 6、CAN總線等多種連接方式,滿足不同車載系統(tǒng)的接入需求。邊緣計(jì)算能力與本地緩存機(jī)制,在網(wǎng)絡(luò)波動(dòng)時(shí)確保系統(tǒng)連續(xù)運(yùn)行。部分高端5G工業(yè)CPE集成了AI加速芯片和大容量存儲(chǔ),可在本地完成部分?jǐn)?shù)據(jù)處理和緩存,減輕網(wǎng)絡(luò)傳輸壓力并降低對(duì)網(wǎng)絡(luò)連接的實(shí)時(shí)依賴。
多網(wǎng)絡(luò)融合與智能切換,構(gòu)建通信保障體系。先進(jìn)的5G工業(yè)CPE支持5G/4G/Wi-Fi多網(wǎng)絡(luò)接入,并能根據(jù)業(yè)務(wù)需求、網(wǎng)絡(luò)質(zhì)量和成本等因素智能選擇最佳網(wǎng)絡(luò)路徑,確保通信的持續(xù)可靠。工業(yè)級(jí)可靠性設(shè)計(jì),適應(yīng)車載環(huán)境的嚴(yán)苛要求。車規(guī)級(jí)5G工業(yè)CPE具備寬溫工作能力(-40℃至85℃)、高防護(hù)等級(jí)(IP67及以上)、抗振動(dòng)與抗沖擊特性,能夠在惡劣道路環(huán)境中穩(wěn)定工作。車路協(xié)同(V2X)系統(tǒng)基于5G網(wǎng)絡(luò)的車路協(xié)同系統(tǒng)是無(wú)人駕駛解決方案的重要組成部分,通過(guò)多維度信息交互大幅提升系統(tǒng)安全性和效率。完整的V2X系統(tǒng)包括以下核心場(chǎng)景:車輛與車輛通信(V2V)實(shí)現(xiàn)超視距感知和協(xié)同行駛。通過(guò)直接通信或蜂窩網(wǎng)絡(luò),車輛之間可以共享位置、速度、加速度、轉(zhuǎn)向等狀態(tài)信息,實(shí)現(xiàn)編隊(duì)行駛、協(xié)同變道、防碰撞預(yù)警等功能,有效解決傳統(tǒng)傳感器的視距限制問題。車輛與基礎(chǔ)設(shè)施通信(V2I)擴(kuò)展環(huán)境感知范圍。智能交通燈、電子標(biāo)志、路側(cè)單元等基礎(chǔ)設(shè)施可以向車輛提供信號(hào)燈狀態(tài)、道路擁堵、施工區(qū)域、限速變更等信息,使車輛提前做出規(guī)劃調(diào)整,提高行駛效率和安全性。車輛與行人通信(V2P)增強(qiáng)弱勢(shì)交通參與者保護(hù)。
通過(guò)智能手機(jī)或可穿戴設(shè)備,行人、非機(jī)動(dòng)車可以向周圍車輛廣播自身位置和移動(dòng)狀態(tài),車輛也可以向行人發(fā)送接近警告,大幅降低交通意外風(fēng)險(xiǎn),特別是在視線受限區(qū)域。車輛與網(wǎng)絡(luò)通信(V2N)實(shí)現(xiàn)云端協(xié)同與服務(wù)接入。車輛通過(guò)5G網(wǎng)絡(luò)接入云服務(wù),獲取實(shí)時(shí)交通信息、高精地圖更新、遠(yuǎn)程診斷支持等,同時(shí)上傳行駛數(shù)據(jù)用于系統(tǒng)優(yōu)化和大數(shù)據(jù)分析。基于5G的低時(shí)延高可靠通信,這些V2X應(yīng)用場(chǎng)景得以真正落地。目前行業(yè)領(lǐng)先方案已實(shí)現(xiàn)車輛間直接通信延遲小于10毫秒,通信距離超過(guò)300米,可靠性達(dá)到99.999%,滿足高速場(chǎng)景下的實(shí)時(shí)協(xié)同需求。
高精地圖與定位系統(tǒng):無(wú)人駕駛的"指南針"
厘米級(jí)高精地圖技術(shù)高精地圖是無(wú)人駕駛的基礎(chǔ)設(shè)施,提供遠(yuǎn)超常規(guī)導(dǎo)航地圖的精確道路信息。先進(jìn)的高精地圖包含以下關(guān)鍵數(shù)據(jù)層:道路幾何信息層,包含車道中心線、車道邊界、車道數(shù)量、車道寬度、道路曲率、坡度、超高等厘米級(jí)精確數(shù)據(jù)。這些信息使無(wú)人駕駛車輛能夠精確規(guī)劃行駛軌跡,即使在車道線模糊或被覆蓋的情況下也能可靠導(dǎo)航。道路語(yǔ)義信息層,包括交通標(biāo)志、信號(hào)燈、人行橫道、停止線、路口結(jié)構(gòu)、交通法規(guī)等。這些信息幫助無(wú)人駕駛系統(tǒng)理解交通規(guī)則和行駛權(quán)限,做出符合交通法規(guī)的決策。
導(dǎo)航拓?fù)湫畔樱枋龅缆分g的連接關(guān)系、允許的轉(zhuǎn)向動(dòng)作、車道變化點(diǎn)等。這些信息使系統(tǒng)能夠規(guī)劃合理的路徑并執(zhí)行正確的駕駛動(dòng)作,如提前變道以準(zhǔn)備轉(zhuǎn)彎。路標(biāo)特征信息層,記錄可用于定位的靜態(tài)特征點(diǎn),如建筑物輪廓、電線桿、路燈等固定物體。這些特征可與車輛實(shí)時(shí)感知數(shù)據(jù)比對(duì),輔助車輛進(jìn)行精確定位。高精地圖的采集更新是一項(xiàng)巨大工程,通常采用專業(yè)測(cè)繪車隊(duì)與眾包數(shù)據(jù)相結(jié)合的方式。測(cè)繪車配備高精度GPS/INS、激光雷達(dá)和全景相機(jī),可采集基礎(chǔ)地圖數(shù)據(jù);而商用車隊(duì)則可通過(guò)上傳行駛過(guò)程中檢測(cè)到的變化信息,實(shí)現(xiàn)地圖的動(dòng)態(tài)更新。
這些眾包數(shù)據(jù)通過(guò)5G網(wǎng)絡(luò)傳輸至云端進(jìn)行處理,保證地圖的實(shí)時(shí)性與準(zhǔn)確性。高精度定位解決方案精準(zhǔn)定位是無(wú)人駕駛的關(guān)鍵能力,現(xiàn)代無(wú)人駕駛系統(tǒng)通常采用多源融合定位方案,包括:衛(wèi)星定位系統(tǒng)結(jié)合RTK技術(shù),提供厘米級(jí)基礎(chǔ)定位能力。通過(guò)接收GPS、北斗、GLONASS、Galileo等多星座信號(hào),并結(jié)合基準(zhǔn)站差分?jǐn)?shù)據(jù),可實(shí)現(xiàn)在開闊區(qū)域2-5厘米的定位精度。先進(jìn)的接收機(jī)還能通過(guò)多頻段、多路徑抑制等技術(shù)增強(qiáng)信號(hào)質(zhì)量。慣性導(dǎo)航系統(tǒng)(INS)提供短時(shí)高頻率的位姿更新。
高精度IMU可在衛(wèi)星信號(hào)暫時(shí)中斷時(shí)(如隧道、地下停車場(chǎng))維持定位,同時(shí)提供精確的姿態(tài)、角速度等動(dòng)態(tài)信息。車規(guī)級(jí)IMU已經(jīng)能夠?qū)⑵瓶刂圃诿啃r(shí)10-20厘米范圍內(nèi)。視覺定位系統(tǒng)通過(guò)匹配實(shí)時(shí)圖像與預(yù)先采集的參考圖像或高精地圖,實(shí)現(xiàn)獨(dú)立于衛(wèi)星信號(hào)的定位能力。特別是在城市峽谷等衛(wèi)星信號(hào)弱的環(huán)境中,視覺定位成為重要補(bǔ)充。最新的視覺定位算法結(jié)合深度學(xué)習(xí)技術(shù),已能實(shí)現(xiàn)20厘米以內(nèi)的橫向定位精度。激光雷達(dá)定位通過(guò)匹配實(shí)時(shí)點(diǎn)云與預(yù)建地圖,提供全天候、高精度的定位結(jié)果。激光雷達(dá)不受光照影響,在隧道、地下車庫(kù)等特殊環(huán)境中表現(xiàn)尤為出色。先進(jìn)的激光點(diǎn)云匹配算法結(jié)合語(yǔ)義分割技術(shù),可過(guò)濾動(dòng)態(tài)物體干擾,實(shí)現(xiàn)更穩(wěn)定的定位效果。路側(cè)基礎(chǔ)設(shè)施輔助定位,如智能路燈、毫米波雷達(dá)等路側(cè)傳感器可以探測(cè)并定位周圍車輛,通過(guò)V2I通信將位置信息發(fā)送給車輛,作為車載定位的補(bǔ)充和校準(zhǔn)。這些定位技術(shù)需要通過(guò)5G網(wǎng)絡(luò)傳輸RTK差分?jǐn)?shù)據(jù)、高精地圖更新、路側(cè)感知結(jié)果等信息,以實(shí)現(xiàn)高精度、高可靠的融合定位。實(shí)踐表明,多源融合定位方案可在99%以上的場(chǎng)景中實(shí)現(xiàn)20厘米以內(nèi)的定位精度,滿足無(wú)人駕駛的安全需求。
人工智能倫理與決策透明度技術(shù)
可解釋AI技術(shù)框架隨著無(wú)人駕駛系統(tǒng)越來(lái)越依賴人工智能做出關(guān)鍵決策,決策過(guò)程的透明度和可解釋性成為不可忽視的技術(shù)挑戰(zhàn)。現(xiàn)代無(wú)人駕駛解決方案應(yīng)當(dāng)包含以下可解釋AI技術(shù):透明決策模型與可視化系統(tǒng),揭示AI決策"黑盒"。先進(jìn)的可解釋AI框架能夠?qū)?fù)雜的深度神經(jīng)網(wǎng)絡(luò)決策過(guò)程轉(zhuǎn)化為可理解的形式,比如通過(guò)顯示注意力熱圖展示系統(tǒng)關(guān)注的關(guān)鍵區(qū)域,或通過(guò)決策樹近似表達(dá)神經(jīng)網(wǎng)絡(luò)的決策邏輯。這些技術(shù)不僅有助于開發(fā)者調(diào)試和優(yōu)化系統(tǒng),也能增強(qiáng)用戶和監(jiān)管者對(duì)AI系統(tǒng)的信任。決策解釋生成器,自動(dòng)生成人類可理解的解釋。當(dāng)無(wú)人駕駛系統(tǒng)做出緊急制動(dòng)、變道等關(guān)鍵決策時(shí),系統(tǒng)能夠生成自然語(yǔ)言解釋,例如"前方行人突然橫穿馬路,系統(tǒng)緊急制動(dòng)以避免碰撞"。這種解釋可以在事后分析或?qū)崟r(shí)顯示給乘客,降低對(duì)AI決策的不確定性感知。倫理決策框架,處理復(fù)雜道德困境。無(wú)人駕駛系統(tǒng)在某些極端情況下可能面臨倫理兩難選擇,例如在不可避免的碰撞情況下如何選擇風(fēng)險(xiǎn)最小的方案。先進(jìn)的倫理決策框架融合了不同文化背景下的倫理觀念,并考慮法律法規(guī)要求,確保系統(tǒng)決策符合社會(huì)廣泛認(rèn)可的價(jià)值觀。這些框架通常基于扎實(shí)的倫理學(xué)理論,結(jié)合具體場(chǎng)景約束,形成可編程的決策規(guī)則。
算法公平性與偏見消除無(wú)人駕駛AI系統(tǒng)的公平性對(duì)于社會(huì)接受度至關(guān)重要,解決方案應(yīng)包含以下技術(shù)措施:數(shù)據(jù)偏見檢測(cè)與修正技術(shù),確保訓(xùn)練數(shù)據(jù)多樣性。先進(jìn)的數(shù)據(jù)審計(jì)工具可以自動(dòng)檢測(cè)訓(xùn)練數(shù)據(jù)中的潛在偏見,例如特定人群、天氣條件或道路類型的表示不足。平衡采樣和合成數(shù)據(jù)生成技術(shù)則可以彌補(bǔ)數(shù)據(jù)集的不均衡問題,確保AI系統(tǒng)在各種條件下都能公平可靠地工作。多樣化仿真測(cè)試系統(tǒng),全面評(píng)估算法表現(xiàn)。通過(guò)構(gòu)建覆蓋不同區(qū)域、文化、交通習(xí)慣的虛擬環(huán)境,對(duì)AI系統(tǒng)進(jìn)行全方位測(cè)試,確保系統(tǒng)能夠適應(yīng)全球各地的道路條件和交通規(guī)則。這些測(cè)試包括常規(guī)場(chǎng)景和極端情況,以驗(yàn)證系統(tǒng)在各種條件下的公平性和安全性。持續(xù)性能監(jiān)控與動(dòng)態(tài)校準(zhǔn)機(jī)制,檢測(cè)并修正運(yùn)行中出現(xiàn)的偏見。部署后的無(wú)人駕駛系統(tǒng)會(huì)持續(xù)收集性能數(shù)據(jù),通過(guò)高級(jí)分析工具識(shí)別系統(tǒng)對(duì)特定場(chǎng)景或?qū)ο蟮奶幚砥睿⑼ㄟ^(guò)OTA更新動(dòng)態(tài)調(diào)整算法參數(shù),確保長(zhǎng)期公平性。
隱私保護(hù)計(jì)算技術(shù)無(wú)人駕駛系統(tǒng)在運(yùn)行過(guò)程中收集大量數(shù)據(jù),如何在利用這些數(shù)據(jù)的同時(shí)保護(hù)隱私,是解決方案必須考慮的重要問題:隱私計(jì)算框架,實(shí)現(xiàn)"數(shù)據(jù)可用不可見"。聯(lián)邦學(xué)習(xí)技術(shù)允許多個(gè)無(wú)人駕駛車隊(duì)在不共享原始數(shù)據(jù)的情況下共同訓(xùn)練AI模型,每個(gè)參與方只需共享模型更新而非原始數(shù)據(jù)。這種方式既保護(hù)了數(shù)據(jù)隱私,又能利用更大規(guī)模的數(shù)據(jù)改進(jìn)算法性能。差分隱私技術(shù),在數(shù)據(jù)分析中保護(hù)個(gè)體隱私。通過(guò)向原始數(shù)據(jù)添加精心設(shè)計(jì)的噪聲,系統(tǒng)可以獲得統(tǒng)計(jì)上準(zhǔn)確的分析結(jié)果,同時(shí)保護(hù)個(gè)體用戶的隱私信息。差分隱私技術(shù)已被廣泛應(yīng)用于位置軌跡分析、交通流量統(tǒng)計(jì)等方面。安全多方計(jì)算,支持隱私保護(hù)下的協(xié)同決策。當(dāng)多輛無(wú)人駕駛車輛需要協(xié)同決策時(shí),安全多方計(jì)算技術(shù)允許它們?cè)诓槐┞陡髯噪[私數(shù)據(jù)的前提下,共同計(jì)算出最優(yōu)決策方案。這種技術(shù)特別適用于擁堵路口的車輛協(xié)調(diào)、車輛編隊(duì)行駛等場(chǎng)景。
云平臺(tái)與大數(shù)據(jù)支持系統(tǒng)
分布式計(jì)算架構(gòu)無(wú)人駕駛解決方案需要一個(gè)多層級(jí)的分布式計(jì)算架構(gòu),以處理海量數(shù)據(jù)并支持實(shí)時(shí)決策:車載計(jì)算層負(fù)責(zé)感知、規(guī)劃和控制的實(shí)時(shí)處理。現(xiàn)代無(wú)人駕駛計(jì)算平臺(tái)通常采用異構(gòu)計(jì)算架構(gòu),結(jié)合CPU、GPU和專用AI加速器,如英偉達(dá)Drive Orin SoC可提供254TOPS算力,支持30多個(gè)傳感器并行處理,同時(shí)運(yùn)行感知、規(guī)劃和監(jiān)控等多個(gè)AI模型。車載系統(tǒng)需要具備足夠的本地計(jì)算能力,確保在網(wǎng)絡(luò)中斷情況下維持基本駕駛功能。邊緣計(jì)算層部署在路側(cè)單元或區(qū)域服務(wù)器,處理需要低延遲但計(jì)算量較大的任務(wù)。典型應(yīng)用包括多車協(xié)同調(diào)度、局部交通流優(yōu)化、高精地圖局部更新等。邊緣計(jì)算節(jié)點(diǎn)通常布署在交通樞紐、復(fù)雜路口等關(guān)鍵位置,通過(guò)5G網(wǎng)絡(luò)與周圍車輛保持毫秒級(jí)通信。
云計(jì)算層處理大規(guī)模數(shù)據(jù)分析、模型訓(xùn)練和系統(tǒng)優(yōu)化任務(wù)。云平臺(tái)通常由數(shù)千臺(tái)高性能服務(wù)器組成,總計(jì)算能力可達(dá)數(shù)百PFLOPS,支持海量數(shù)據(jù)存儲(chǔ)和復(fù)雜AI模型訓(xùn)練。無(wú)人駕駛公司一般會(huì)建立專用的AI訓(xùn)練集群,例如Waymo的訓(xùn)練集群就包含數(shù)萬(wàn)個(gè)TPU核心,可以在幾天內(nèi)完成需要普通計(jì)算機(jī)數(shù)年才能完成的訓(xùn)練任務(wù)。這種分層計(jì)算架構(gòu)依賴高速、可靠的網(wǎng)絡(luò)連接,特別是車載層與邊緣層之間的通信需要5G網(wǎng)絡(luò)的低延遲高帶寬特性,確保關(guān)鍵信息能夠及時(shí)傳遞和處理。數(shù)據(jù)閉環(huán)與持續(xù)學(xué)習(xí)系統(tǒng)無(wú)人駕駛系統(tǒng)的不斷進(jìn)化依賴于完善的數(shù)據(jù)閉環(huán)機(jī)制,包括:數(shù)據(jù)采集與標(biāo)注平臺(tái),高效收集和處理各類場(chǎng)景數(shù)據(jù)。領(lǐng)先的無(wú)人駕駛公司已經(jīng)建立了PB級(jí)的數(shù)據(jù)庫(kù),涵蓋各種天氣、道路和交通條件。自動(dòng)化標(biāo)注技術(shù)結(jié)合人工審核,可將數(shù)據(jù)處理效率提升10-100倍,加速模型迭代。場(chǎng)景庫(kù)與仿真系統(tǒng),通過(guò)虛擬測(cè)試驗(yàn)證算法性能。先進(jìn)的仿真平臺(tái)可創(chuàng)建數(shù)字孿生環(huán)境,利用實(shí)際交通數(shù)據(jù)生成高度逼真的虛擬場(chǎng)景。單個(gè)仿真集群可并行運(yùn)行數(shù)千個(gè)場(chǎng)景,在一天內(nèi)完成相當(dāng)于數(shù)百萬(wàn)公里實(shí)路測(cè)試的驗(yàn)證工作。OTA更新系統(tǒng),遠(yuǎn)程部署優(yōu)化后的算法和模型。通過(guò)5G網(wǎng)絡(luò)的大帶寬特性,可以安全高效地向車隊(duì)推送軟件更新,包括感知模型、決策算法和控制參數(shù)等。先進(jìn)的增量更新技術(shù)可將更新包大小控制在幾百M(fèi)B范圍,即使在網(wǎng)絡(luò)條件一般的區(qū)域也能快速完成更新。異常檢測(cè)與遠(yuǎn)程協(xié)助系統(tǒng),處理算法無(wú)法應(yīng)對(duì)的邊緣情況。當(dāng)無(wú)人駕駛系統(tǒng)遇到未知場(chǎng)景或低置信度狀態(tài)時(shí),可通過(guò)5G網(wǎng)絡(luò)將現(xiàn)場(chǎng)數(shù)據(jù)實(shí)時(shí)傳輸至遠(yuǎn)程控制中心,由專業(yè)操作員提供遠(yuǎn)程引導(dǎo)或接管。一個(gè)遠(yuǎn)程控制中心通常可支持?jǐn)?shù)十甚至上百輛無(wú)人駕駛車輛的監(jiān)控和應(yīng)急處理。
安全保障體系:多層冗余與容錯(cuò)設(shè)計(jì)
硬件冗余與功能安全無(wú)人駕駛系統(tǒng)必須建立多層硬件冗余保障,確保在關(guān)鍵部件失效時(shí)仍能保持基本安全功能:傳感器冗余配置,不同原理傳感器相互備份。典型的無(wú)人駕駛車輛會(huì)配備多個(gè)激光雷達(dá)、毫米波雷達(dá)和攝像頭,保證同一區(qū)域由多個(gè)傳感器覆蓋。當(dāng)某一傳感器失效或受到干擾時(shí),系統(tǒng)可無(wú)縫切換至備用傳感器,維持正常感知能力。計(jì)算平臺(tái)多通道設(shè)計(jì),確保核心算法不中斷。高可靠無(wú)人駕駛系統(tǒng)通常采用至少雙通道計(jì)算架構(gòu),主計(jì)算單元與安全備份單元并行運(yùn)行,實(shí)時(shí)比對(duì)結(jié)果。兩套系統(tǒng)采用不同硬件平臺(tái)和軟件實(shí)現(xiàn),最大限度避免共模故障風(fēng)險(xiǎn)。執(zhí)行系統(tǒng)備份機(jī)制,關(guān)鍵執(zhí)行部件雙重或三重冗余。轉(zhuǎn)向、制動(dòng)和動(dòng)力系統(tǒng)配備獨(dú)立的備用執(zhí)行通道,如電子轉(zhuǎn)向結(jié)合機(jī)械連接、電子制動(dòng)結(jié)合液壓備份等,確保在主系統(tǒng)失效時(shí)能夠安全停車或維持基本控制。電源系統(tǒng)容錯(cuò)設(shè)計(jì),防止供電故障導(dǎo)致系統(tǒng)崩潰。車輛配備主電池、備用電池和應(yīng)急UPS系統(tǒng),多級(jí)電源管理確保在主電源故障時(shí),關(guān)鍵系統(tǒng)仍能正常工作至少20-30分鐘,足夠車輛安全撤離到路邊停車區(qū)。網(wǎng)絡(luò)安全與數(shù)據(jù)保護(hù)隨著無(wú)人駕駛系統(tǒng)越來(lái)越依賴網(wǎng)絡(luò)連接,網(wǎng)絡(luò)安全已成為解決方案不可或缺的組成部分:通信安全加密機(jī)制,防止數(shù)據(jù)攔截和篡改。采用端到端加密技術(shù),結(jié)合高強(qiáng)度身份認(rèn)證和會(huì)話密鑰動(dòng)態(tài)更新,保障車輛與云平臺(tái)、路側(cè)設(shè)施之間的安全通信。先進(jìn)的量子抗性加密算法可抵御未來(lái)量子計(jì)算帶來(lái)的潛在威脅。入侵檢測(cè)與防御系統(tǒng),實(shí)時(shí)監(jiān)控異常訪問嘗試。基于人工智能的網(wǎng)絡(luò)安全模型持續(xù)分析通信流量和系統(tǒng)活動(dòng),識(shí)別可疑行為并觸發(fā)相應(yīng)防護(hù)措施。多層防火墻與訪問控制技術(shù)嚴(yán)格限制每個(gè)系統(tǒng)組件的權(quán)限范圍,減少攻擊面。安全操作系統(tǒng)與隔離架構(gòu),限制潛在攻擊的影響范圍。核心駕駛功能與娛樂信息系統(tǒng)采用嚴(yán)格隔離設(shè)計(jì),即使信息娛樂系統(tǒng)被入侵,也不會(huì)影響安全關(guān)鍵系統(tǒng)的運(yùn)行。安全啟動(dòng)與遠(yuǎn)程證明機(jī)制確保系統(tǒng)運(yùn)行未被非法修改。數(shù)據(jù)保護(hù)與隱私合規(guī),符合GDPR等全球隱私法規(guī)要求。系統(tǒng)設(shè)計(jì)滿足數(shù)據(jù)最小化、用途限制、存儲(chǔ)限制等核心隱私原則,用戶可控制和管理個(gè)人數(shù)據(jù)的使用范圍。敏感數(shù)據(jù)采用多層加密存儲(chǔ),并實(shí)施嚴(yán)格的訪問控制和審計(jì)跟蹤。功能安全開發(fā)流程無(wú)人駕駛系統(tǒng)開發(fā)必須遵循嚴(yán)格的功能安全標(biāo)準(zhǔn),如ISO 26262和ISO/PAS 21448(SOTIF):系統(tǒng)級(jí)風(fēng)險(xiǎn)評(píng)估與安全目標(biāo)定義,識(shí)別潛在危害和安全需求。通過(guò)系統(tǒng)化的危害分析與風(fēng)險(xiǎn)評(píng)估(HARA),確定每個(gè)功能的汽車安全完整性等級(jí)(ASIL),建立安全目標(biāo)和安全要求。安全設(shè)計(jì)與驗(yàn)證流程,確保系統(tǒng)滿足安全目標(biāo)。從功能架構(gòu)、系統(tǒng)設(shè)計(jì)到軟件實(shí)現(xiàn)的每個(gè)階段,都實(shí)施嚴(yán)格的安全分析和驗(yàn)證,包括FMEA、FTA、DFMEA等方法,及早發(fā)現(xiàn)并消除潛在風(fēng)險(xiǎn)。仿真與實(shí)車測(cè)試驗(yàn)證,全面評(píng)估系統(tǒng)安全性。構(gòu)建涵蓋各類危險(xiǎn)場(chǎng)景的測(cè)試庫(kù),通過(guò)軟件在環(huán)(SIL)、硬件在環(huán)(HIL)和車輛在環(huán)(VIL)等多級(jí)測(cè)試方法,驗(yàn)證系統(tǒng)在正常和異常條件下的安全表現(xiàn)。模擬各種故障場(chǎng)景,確認(rèn)系統(tǒng)能夠正確處理如傳感器故障、通信中斷、計(jì)算平臺(tái)異常等情況。持續(xù)監(jiān)控與安全更新機(jī)制,應(yīng)對(duì)運(yùn)行中發(fā)現(xiàn)的新風(fēng)險(xiǎn)。車輛投入使用后,通過(guò)遠(yuǎn)程監(jiān)控系統(tǒng)持續(xù)收集安全相關(guān)數(shù)據(jù),及時(shí)發(fā)現(xiàn)潛在安全問題。建立快速響應(yīng)機(jī)制,針對(duì)新發(fā)現(xiàn)的漏洞或風(fēng)險(xiǎn),及時(shí)開發(fā)和部署安全補(bǔ)丁。
落地應(yīng)用場(chǎng)景與商業(yè)化路徑
分級(jí)部署策略無(wú)人駕駛技術(shù)的商業(yè)化通常遵循分階段、分場(chǎng)景的部署策略:特定場(chǎng)景L4自動(dòng)駕駛,率先在限定區(qū)域?qū)崿F(xiàn)商業(yè)化。如封閉園區(qū)、港口、礦區(qū)等環(huán)境相對(duì)可控的區(qū)域,已經(jīng)開始規(guī)模化部署無(wú)人駕駛解決方案。這些應(yīng)用通常采用5G專網(wǎng),提供穩(wěn)定的通信保障,降低技術(shù)實(shí)現(xiàn)難度。城市道路Robotaxi服務(wù),逐步擴(kuò)大運(yùn)營(yíng)范圍。多家企業(yè)已在特定城市區(qū)域開展自動(dòng)駕駛出租車服務(wù),初期配備安全員,后續(xù)將過(guò)渡至完全無(wú)人駕駛。服務(wù)區(qū)域通常優(yōu)先選擇5G網(wǎng)絡(luò)覆蓋良好、道路條件清晰、交通規(guī)則執(zhí)行嚴(yán)格的區(qū)域,逐步擴(kuò)展至更復(fù)雜環(huán)境。高速公路貨運(yùn)自動(dòng)駕駛,解決長(zhǎng)途物流痛點(diǎn)。高速公路環(huán)境相對(duì)簡(jiǎn)單,且貨運(yùn)對(duì)舒適性要求低于客運(yùn),成為自動(dòng)駕駛商業(yè)化的重要方向。多家企業(yè)已開始運(yùn)營(yíng)定點(diǎn)對(duì)定點(diǎn)的港口、物流中心之間的無(wú)人貨運(yùn)服務(wù),顯著降低物流成本并提高效率。公共交通自動(dòng)駕駛,提升城市交通系統(tǒng)效率。自動(dòng)駕駛公交車、微循環(huán)巴士在固定或半固定線路上運(yùn)行,已在多個(gè)城市開展試點(diǎn)。這些車輛通常在專用車道或優(yōu)先路權(quán)條件下運(yùn)行,結(jié)合智能交通信號(hào)系統(tǒng),實(shí)現(xiàn)高效、準(zhǔn)點(diǎn)的公共交通服務(wù)。產(chǎn)業(yè)鏈協(xié)同與商業(yè)模式無(wú)人駕駛生態(tài)系統(tǒng)需要多方協(xié)作,形成完整的產(chǎn)業(yè)鏈:硬件供應(yīng)商提供傳感器、計(jì)算平臺(tái)、5G通信模塊等關(guān)鍵部件。隨著市場(chǎng)規(guī)模擴(kuò)大,核心部件成本持續(xù)下降,如激光雷達(dá)已從早期的數(shù)萬(wàn)美元降至千美元級(jí)別,計(jì)算平臺(tái)功耗效率每年提升30%以上,5G模組價(jià)格逐步接近4G水平。軟件技術(shù)提供商開發(fā)感知、決策、控制等核心算法。越來(lái)越多的公司采用軟件即服務(wù)(SaaS)模式,提供算法包和軟件升級(jí)服務(wù),創(chuàng)造持續(xù)性收入。部分公司專注于特定模塊,如高精地圖、視覺感知或規(guī)劃決策系統(tǒng),形成專業(yè)化分工。運(yùn)營(yíng)服務(wù)商負(fù)責(zé)車隊(duì)管理、調(diào)度和維護(hù)。無(wú)人駕駛車隊(duì)運(yùn)營(yíng)需要建立全新的運(yùn)營(yíng)模式,包括遠(yuǎn)程監(jiān)控中心、定期維護(hù)流程、應(yīng)急處理機(jī)制等。有效的運(yùn)營(yíng)管理可以顯著提升車輛利用率和服務(wù)質(zhì)量,成為競(jìng)爭(zhēng)的關(guān)鍵因素。基礎(chǔ)設(shè)施提供商建設(shè)智能道路設(shè)施和通信網(wǎng)絡(luò)。電信運(yùn)營(yíng)商正加速5G網(wǎng)絡(luò)建設(shè),特別是在交通要道和城市核心區(qū)域;智能道路基礎(chǔ)設(shè)施供應(yīng)商則提供路側(cè)單元、智能交通燈和V2X通信設(shè)備,助力車路協(xié)同系統(tǒng)的部署。這些參與者共同組成無(wú)人駕駛產(chǎn)業(yè)鏈,創(chuàng)造多種商業(yè)模式,如一次性銷售、訂閱模式、使用即付費(fèi)、收益分成等。特別是基于5G網(wǎng)絡(luò)的"即服務(wù)"模式正成為行業(yè)趨勢(shì),車企可按需購(gòu)買自動(dòng)駕駛能力、高精地圖更新或遠(yuǎn)程監(jiān)控服務(wù),降低前期投資風(fēng)險(xiǎn)。
結(jié)語(yǔ):技術(shù)融合創(chuàng)新驅(qū)動(dòng)未來(lái)交通變革
無(wú)人駕駛解決方案是一個(gè)綜合性系統(tǒng)工程,涵蓋傳感感知、AI決策、精確控制、高速通信、高精定位、云端支持、安全保障等多個(gè)技術(shù)領(lǐng)域。其中,5G網(wǎng)絡(luò)作為連接各個(gè)子系統(tǒng)的神經(jīng)網(wǎng)絡(luò),以其高帶寬、低延遲、廣連接的特性,成為推動(dòng)無(wú)人駕駛從實(shí)驗(yàn)室走向現(xiàn)實(shí)的關(guān)鍵技術(shù)基礎(chǔ)。
審核編輯 黃宇
-
人工智能
+關(guān)注
關(guān)注
1804文章
48788瀏覽量
246973 -
無(wú)人駕駛
+關(guān)注
關(guān)注
99文章
4156瀏覽量
122984
發(fā)布評(píng)論請(qǐng)先 登錄

什么是低速無(wú)人駕駛,讓你一分鐘秒懂 #無(wú)人駕駛 #5g無(wú)人駕駛 #低速無(wú)人駕駛
無(wú)人駕駛技術(shù)未來(lái)在哪里?低速才是突破口

智行者無(wú)人駕駛技術(shù)助力應(yīng)急救援智能化升級(jí)
派歌銳無(wú)人駕駛車輛線束:智能駕駛的神經(jīng)網(wǎng)絡(luò)
易控智駕發(fā)布礦山無(wú)人駕駛應(yīng)用落地成果
為什么聊自動(dòng)駕駛的越來(lái)越多,聊無(wú)人駕駛的越來(lái)越少?

測(cè)速雷達(dá)與無(wú)人駕駛技術(shù)的結(jié)合 測(cè)速雷達(dá)故障排除技巧
低速無(wú)人駕駛清掃機(jī)器人無(wú)線充電解決方案
一桿有AI的路燈:感知環(huán)境監(jiān)測(cè)路況還能“對(duì)話”無(wú)人駕駛AI燈桿屏

UWB模塊如何助力無(wú)人駕駛技術(shù)
無(wú)人駕駛車輛的"網(wǎng)絡(luò)秘密",聯(lián)網(wǎng)可不是個(gè)簡(jiǎn)單的事兒

特斯拉推出無(wú)人駕駛Model Y
馬斯克稱:通用因技術(shù)未成熟放棄無(wú)人駕駛
5G賦能車聯(lián)網(wǎng),無(wú)人駕駛引領(lǐng)未來(lái)出行

無(wú)人駕駛汽車應(yīng)用晶振TSX-3225






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論