 磁致伸縮位移傳感器算法介紹
磁致伸縮位移傳感器算法介紹
磁致伸縮位移傳感器是一種高精度的位移測量設備,廣泛應用于工業自動化、機械制造等領域。其工作原理基于磁致伸縮效應,即某些材料在受到磁場作用時會發生長度變化。下面我將詳細介紹磁致伸縮位移傳感器的工作原理及其算法。
工作原理
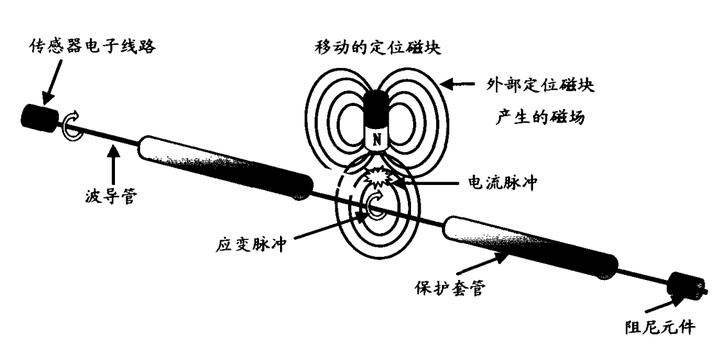
磁致伸縮位移傳感器原理
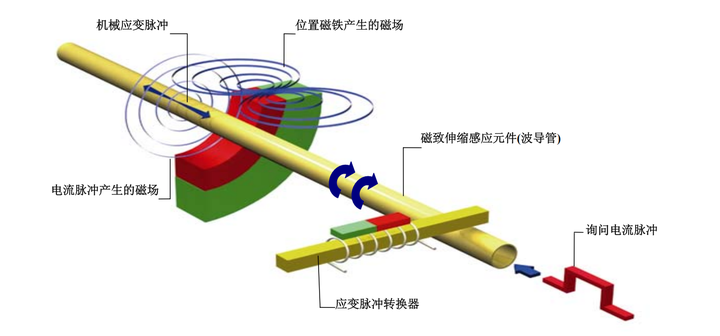
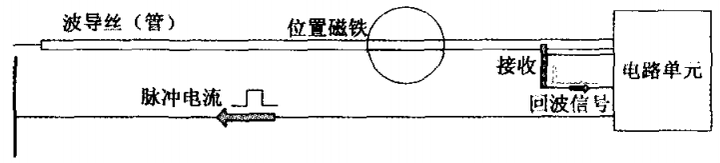
磁致伸縮材料:磁致伸縮位移傳感器的核心是一根由磁致伸縮材料(如鐵鎳合金)制成的波導絲。
激勵脈沖:傳感器內部有一個電子電路,會周期性地向波導絲發送一個電流脈沖,這個脈沖會在波導絲中產生一個環形磁場。
位置磁鐵:在波導絲外部,有一個可以移動的位置磁鐵,它代表了被測物體的位置。
超聲波信號:當環形磁場與位置磁鐵的磁場相互作用時,在波導絲上會產生一個瞬時的扭轉應力波(也稱為超聲波)。
檢測時間差:這個超聲波沿著波導絲傳播到傳感器的另一端,被一個拾音器(通常是壓電晶體)檢測到。通過測量從發送電流脈沖到檢測到超聲波的時間差,可以計算出位置磁鐵的位置。
算法介紹
磁致伸縮位移傳感器的主要算法是基于時間差的測量來確定位置。具體步驟如下:
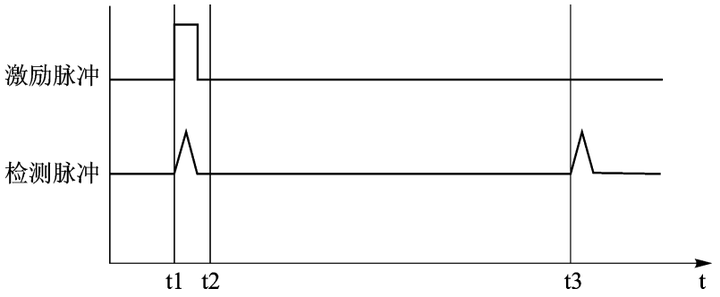
1、發送激勵脈沖:電子電路向波導絲發送一個電流脈沖,記為 ( t_0 )。
2、檢測超聲波信號:位置磁鐵產生的超聲波信號被拾音器檢測到,記為 ( t_1 )。
3、計算時間差:計算從發送電流脈沖到檢測到超聲波信號的時間差 (△t = t_1 - t_0 )。
4、轉換為位移:由于超聲波在波導絲中的傳播速度 ( v ) 是已知的,可以通過以下公式計算位置磁鐵的位置 ( L ): L = v×△t
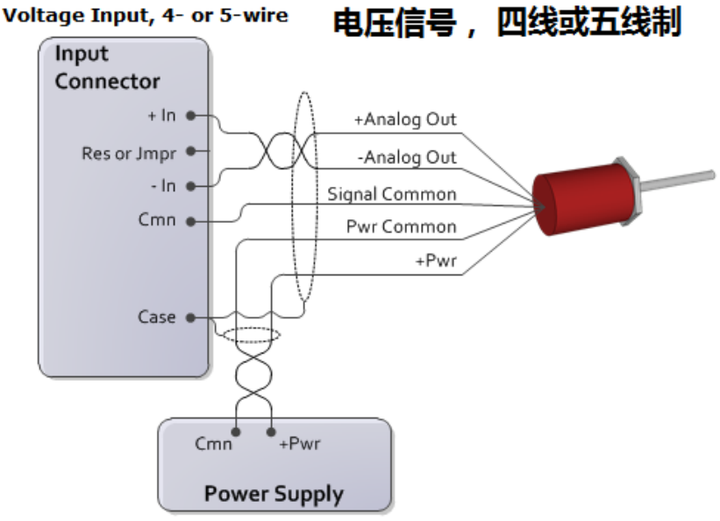
具體實現
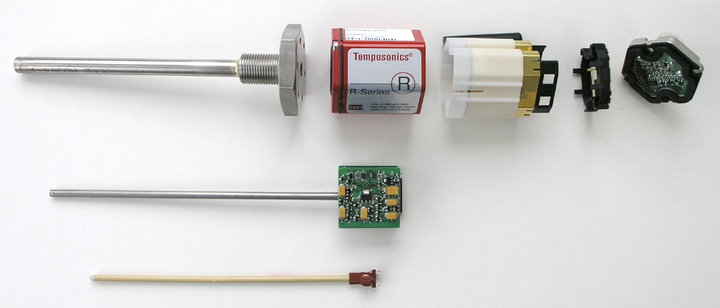
磁致伸縮位移傳感器硬件
硬件部分:包括波導絲、位置磁鐵、激勵電路、拾音器等。
軟件部分:主要負責控制激勵脈沖的發送、接收超聲波信號、計算時間差并轉換為位移值。
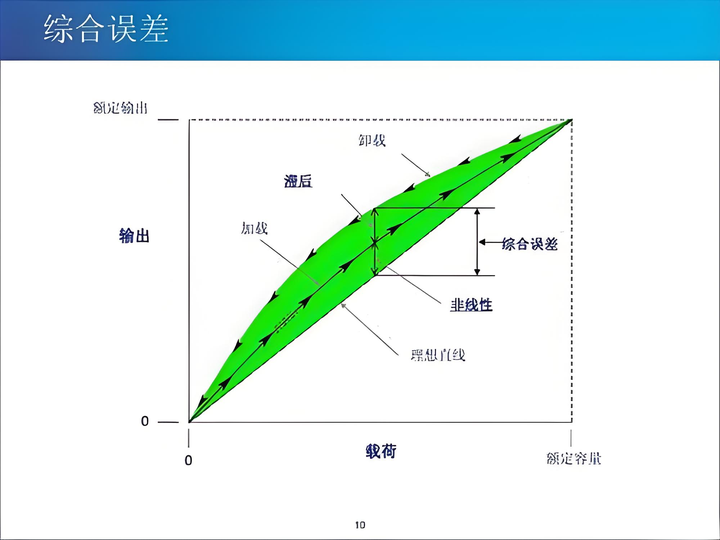
誤差校正
磁致伸縮位移傳感器誤差校準
為了提高測量精度,通常還需要進行一些誤差校正:
溫度補償:超聲波在不同溫度下的傳播速度會有所不同,因此需要對溫度進行補償。
非線性校正:實際應用中,波導絲的傳播速度可能會有輕微的非線性變化,需要通過校準數據進行修正。
總結
磁致伸縮位移傳感器通過測量超聲波在波導絲中的傳播時間來確定位置磁鐵的位置。其核心算法是基于時間差的測量,并通過已知的傳播速度將其轉換為位移。通過適當的誤差校正,可以實現高精度的位移測量。
本文轉載于深圳市博爾森科技有限公司官網:http://www.brsen.com
審核編輯 黃宇
-
位移傳感器
+關注
關注
5文章
1129瀏覽量
34895 -
算法
+關注
關注
23文章
4687瀏覽量
94435
發布評論請先 登錄
磁致伸縮位移傳感器誤差分析
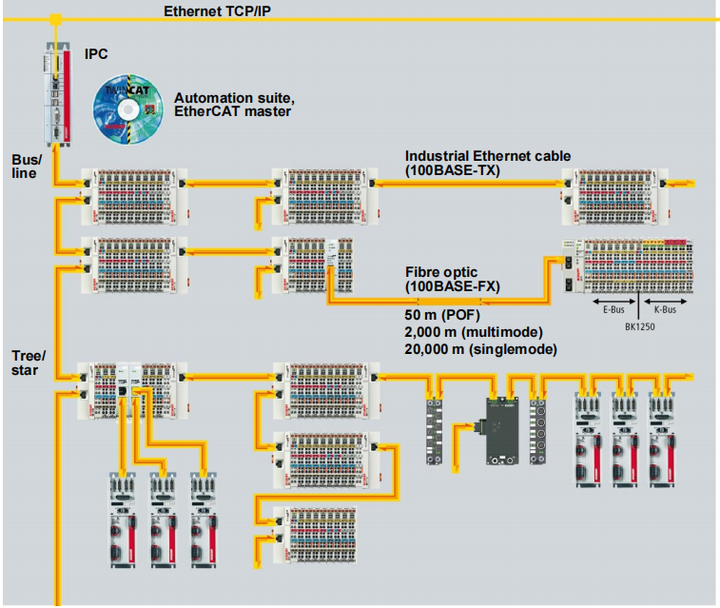
EtherCAT在磁致伸縮位移傳感器中的應用
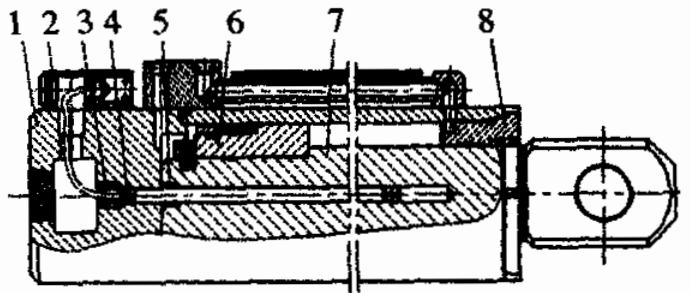
內置磁致伸縮位移傳感器的推移油缸








 工商網監
工商網監
評論