 EtherCAT轉Modbus RTU助力造車設備升級
EtherCAT轉Modbus RTU助力造車設備升級
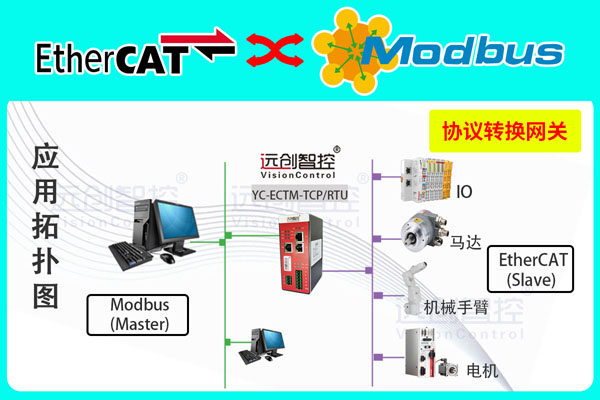
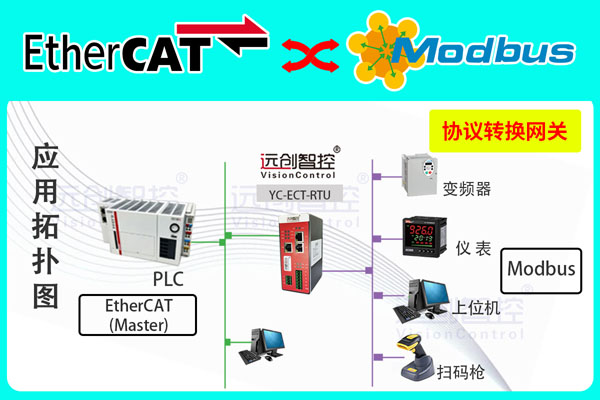
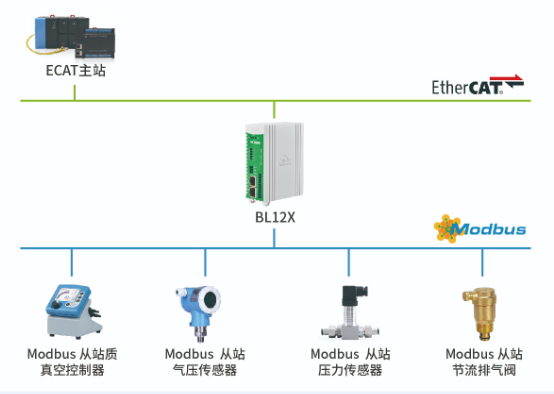
在智能汽車制造領域,設備間的高效協同與數據實時交互是提升生產效率、保障工藝精度的核心。然而,隨著產線設備協議的多樣化——高速EtherCAT設備與傳統Modbus RTU設備并存,通信壁壘已成為制約造車工藝升級的“隱形瓶頸”。如何讓激光焊接機器人、高精度傳感器與老舊工控系統無縫對話?如何實現毫秒級數據同步,確保車身裝配零誤差?JH-ECT005疆鴻智能EtherCAT轉Modbus RTU協議轉換網關,正以“破局者”姿態,為汽車制造企業提供高效、穩定的通信解決方案。
痛點直擊:造車產線的三大通信挑戰
設備孤島,協同低效
激光焊接機器人(EtherCAT)與PLC控制系統(Modbus RTU)因協議差異無法直接通信,需人工干預數據中轉,導致焊接路徑偏差達±0.3mm,返工率增加15%。
傳統儀表、傳感器(Modbus RTU)無法融入EtherCAT實時網絡,數據延遲超10ms,影響沖壓機與涂裝設備的同步控制。
改造成本高昂
定制化協議轉換方案開發周期長,單條產線改造成本超百萬,且兼容性風險高。
運維復雜,數據割裂
質量追溯系統(Modbus RTU)與機器人數據(EtherCAT)無法融合,缺陷分析耗時增加50%
解決方案:JH-ECT005疆鴻智能****EtherCAT轉Modbus RTU網關的核心價值
JH-ECT005疆鴻智能****智能協議網關 ,專為汽車制造場景設計,以三大核心能力打破通信壁壘:
1. 雙向協議轉換,毫秒級實時響應
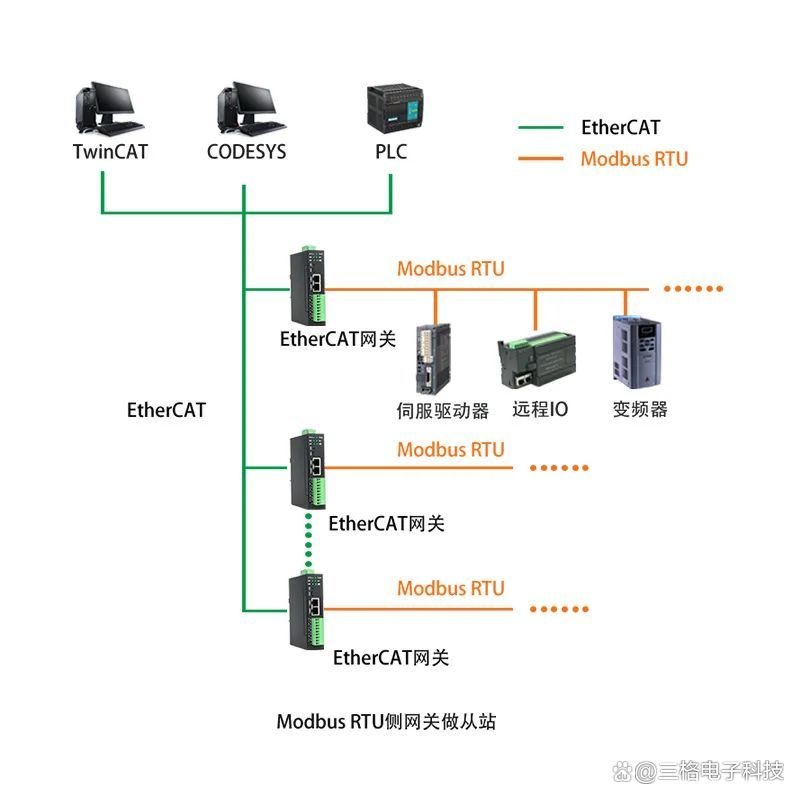
EtherCAT側 :作為從站接入激光焊接機、伺服驅動器等設備,支持μs級數據采集,滿足車身焊接0.05mm精度要求。
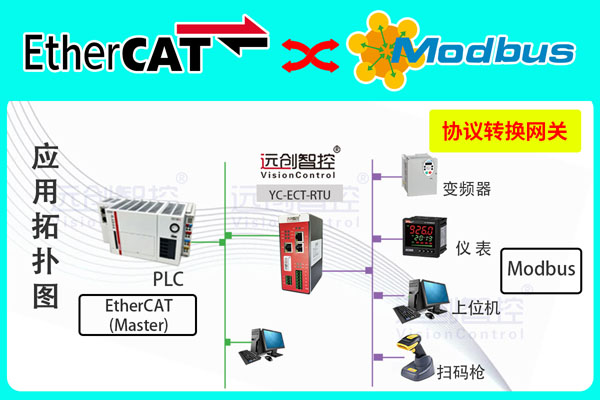
Modbus RTU側 :作為主站連接PLC、變頻器等傳統設備,支持01H-10H功能碼,覆蓋90%工業場景。
雙向映射 :通過動態數據緩沖區,實現EtherCAT與Modbus RTU指令的實時互轉,通信延遲低至1ms,確保沖壓機與機器人協同誤差<±0.1mm。
2. 邊緣計算賦能智能決策
本地數據處理 :內置邊緣計算模塊,可過濾冗余數據并動態優化控制參數。例如,基于實時電流反饋調整焊接功率,減少能耗20%。
故障預警 :通過AI算法分析設備運行狀態,提前72小時預警電機過載風險,降低非計劃停機40%。
3. 即插即用,低成本改造
靈活部署 :支持RS485/RS232接口切換,適配西門子、倍福等主流PLC,無需更換現有設備。
快速配置 :通過GW Modbus Builder軟件,10分鐘完成參數映射,降低90%調試時間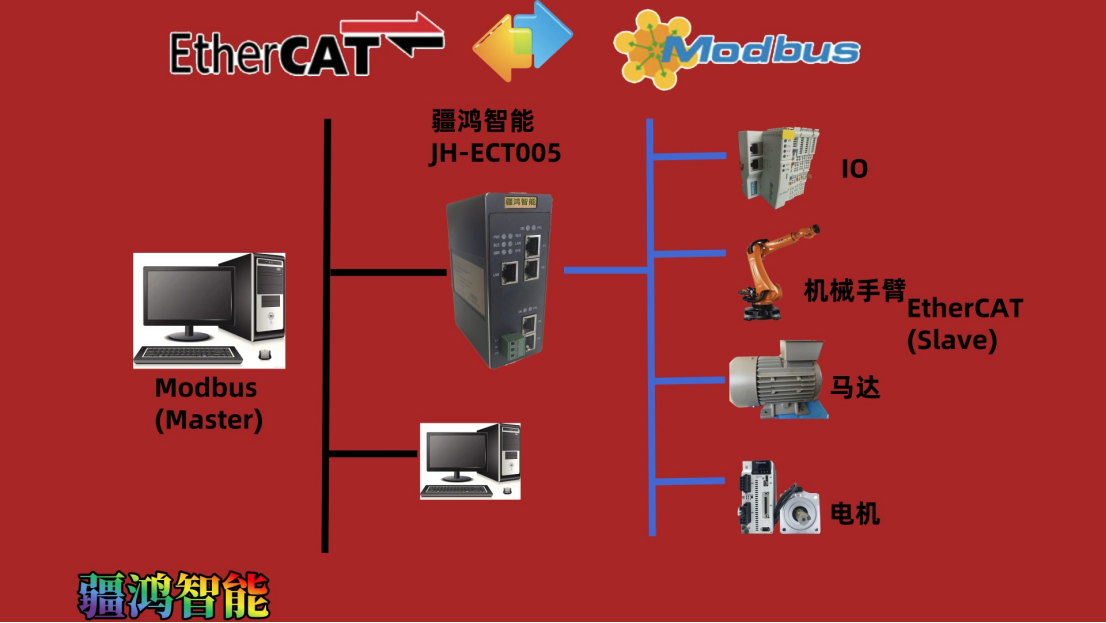
應用場景:從焊裝到總裝的效能躍升
焊裝車間:高精度協同
網關連接EtherCAT焊接機器人與Modbus RTU夾具系統,實時同步定位數據,焊接路徑偏差從±0.3mm降至±0.05mm,單臺機器人焊接效率提升20%。
涂裝線:能耗優化
整合Modbus RTU電表數據至EtherCAT網絡,動態調節烘房溫度,能耗降低18%,年節省電費超50萬元。
總裝車間:遠程運維
通過網關將設備數據上傳至云端,實現手機端實時監控,故障響應時間從4小時縮短至15分鐘
審核編輯 黃宇
-
ethercat
+關注
關注
19文章
1056瀏覽量
39725 -
MODBUS RTU
+關注
關注
0文章
57瀏覽量
3356
發布評論請先 登錄
基于 DeviceNet 轉 MODBUS RTU 協議的施耐德 PLC 與 ABB 電機驅動器倉儲堆垛機的定位控制優化方案?
工業自動化協議轉換利器:EtherCAT與Modbus RTU

Modbus TCP 到 RTU:輕松轉換指南!

EtherCAT轉 4 路Modbus RTU網關-三格電子
EtherCAT轉Modbus RTU總線協議轉換網關
EtherCAT轉Modbus RTU/RS485/232協議轉換網關
EtherCAT主站轉Modbus-RTU總線協議網關

Modbus RTU轉CC-link協議網關(Modbus RTU轉CC-link)

EtherCAT主站轉Modbus RTU網關(EtherCAT轉Modbus RTU)
Modbus RTU轉CC-Link協議網關(CC-Link轉Modbus RTU)

EtherNet/IP轉Modbus-RTU主站網關(EtherNet/IP轉Modbus-RTU)

EtherCAT轉Modbus-RTU協議網關(Modbus-RTU轉EtherCAT)
EtherCAT轉Modbus RTU協議網關(YC-ECT-RTU)

Modbus轉EtherCAT網關快速實現Modbus設備與EtherCAT網絡通信





 工商網監
工商網監
評論