 智能投遞分揀機器人采用激光SLAM導航技術
智能投遞分揀機器人采用激光SLAM導航技術
在電商爆發式增長與即時配送需求激增的當下,物流分揀中心正面臨一場效率與成本的極限博弈。傳統人工分揀效率低、錯誤率高,而自動化設備又常受限于靈活性不足。面對這一痛點,智能投遞分揀機器人以顛覆性表現給出了答案——每小時的工作效率快不快?其單機分揀效率可達3000件/小時,集群作業時峰值突破10萬件/小時,錯誤率低于0.01%,徹底改寫了物流分揀的效能邊界。
一、速度革命:從“機械分揀”到“動態超車”
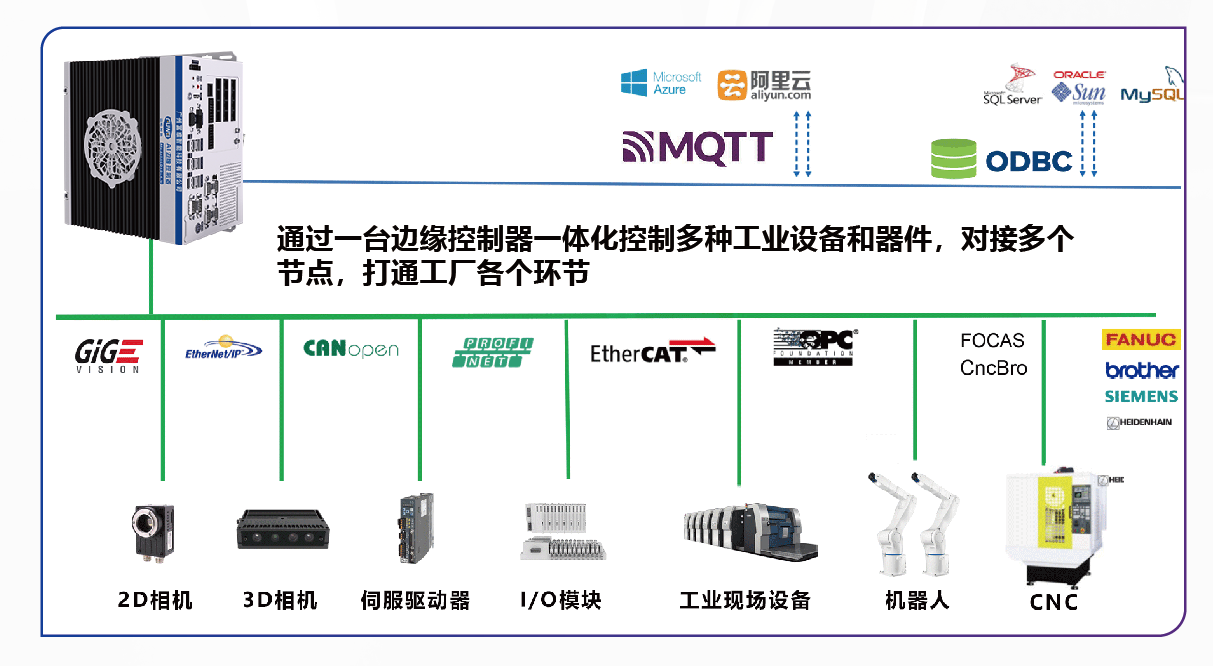
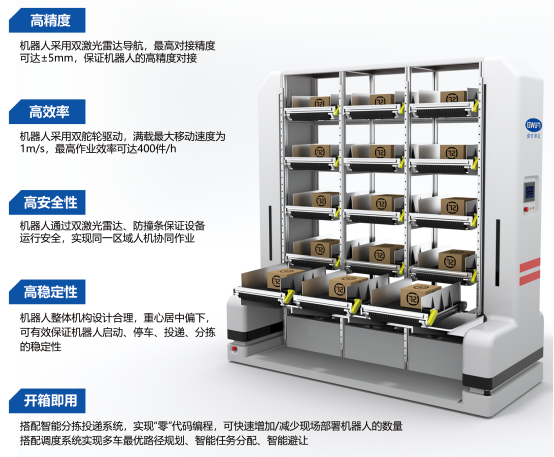
傳統分揀設備依賴固定軌道與剛性流程,效率提升往往以犧牲靈活性為代價。而富唯智能的智能投遞分揀機器人采用激光SLAM導航技術,通過動態路徑規劃算法,實現“零碰撞超車”與“毫秒級避障”。在雙十一高峰期的實測中,機器人集群在8000㎡倉庫內穿梭,平均響應速度達0.2秒,單小時處理包裹量較傳統交叉帶分揀機提升120%。這種“柔性加速”能力,讓每小時的工作效率快不快不再受限于硬件架構,而是由智能算法持續賦能。
二、精準協同:效率與容錯的“雙螺旋”進化
效率的提升絕非簡單的速度疊加,更需要精準協同與容錯機制的支撐。富唯智能的AI-ICDP(智能協同決策平臺)通過邊緣計算與云端聯動,實時調度300臺機器人協同作業,將設備空載率從行業平均15%降至3%以下。其獨創的“蜂群分揀模式”中,機器人通過UWB超寬帶通信技術共享位置信息,動態調整任務優先級,確保每個包裹從掃碼到落格的全程耗時壓縮至8秒內。某國際快遞企業引入后,分揀中心日均處理量從80萬件躍升至220萬件,人工干預率下降90%,驗證了智能投遞分揀機器人每小時的工作效率快不快的核心價值。
三、耐久性突破:7×24小時的“永動機”邏輯
效率的可持續性往往被忽視,而富唯智能通過技術創新解決了這一隱性痛點。其機器人采用模塊化快拆設計,關鍵部件(如電池、導航模塊)支持熱插拔更換,設備綜合稼動率高達99.5%。搭配自研的智能充放電系統,機器人可在作業間隙自動返回充電樁“閃充”,5分鐘補能續航2小時,真正實現全天候無間斷運行。
四、場景穿透力:從標準倉到復雜環境的效率躍遷
效率的真實性需經多元場景驗證。富唯智能的智能投遞分揀機器人通過多模態自適應技術,突破傳統設備的地形限制:
1.混合場景導航:在玻璃幕墻、金屬貨架等強干擾環境中,定位精度仍保持±5mm。 這種“全地形適應力”讓機器人在異形包裹、狹窄通道等復雜場景中,依然保持每小時的工作效率快不快的高標準輸出。
審核編輯 黃宇
-
機器人
+關注
關注
213文章
29567瀏覽量
211940 -
激光
+關注
關注
20文章
3441瀏覽量
65934 -
SLAM
+關注
關注
24文章
437瀏覽量
32376
發布評論請先 登錄
詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
智能投遞機器人為什么采用鋁型材質?揭秘輕量化時代的效率革命
【「# ROS 2智能機器人開發實踐」閱讀體驗】+ROS2應用案例
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
復合機器人是通過什么導航方式?

托盤“智”運,SLAM導航 地牛式AGV機器人,“7*24小時”工作!






 工商網監
工商網監
評論