") HJ4205步進(jìn)電機(jī)驅(qū)動(dòng)電路詳解
HJ4205步進(jìn)電機(jī)驅(qū)動(dòng)電路詳解
一、 概 述
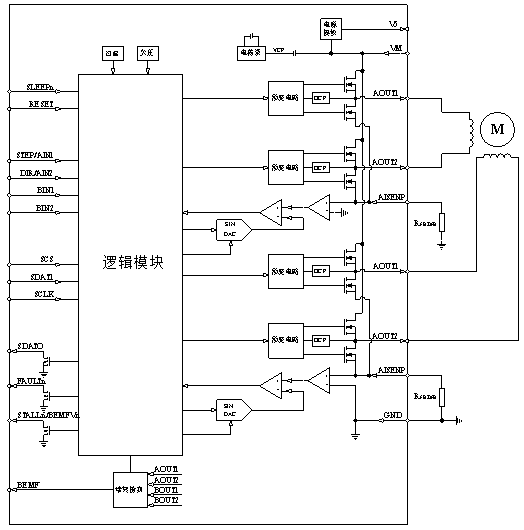
HJ4205是一款步進(jìn)電機(jī)驅(qū)動(dòng)電路。包含一個(gè)步進(jìn)電機(jī)控制器和內(nèi)部N溝道MOSFET,來(lái)驅(qū)動(dòng)一個(gè)雙極步進(jìn)電機(jī)或兩個(gè)刷式直流電機(jī)。HJ4205支持全步進(jìn)到1/256步進(jìn)驅(qū)動(dòng)模式。通過(guò)使用自適應(yīng)消隱時(shí)間和包括自動(dòng)混合衰減模式在內(nèi)的多種不同的電流衰減模式,可實(shí)現(xiàn)非常平滑的運(yùn)動(dòng)過(guò)程。
電機(jī)運(yùn)動(dòng)采用標(biāo)準(zhǔn)的DIR/STEP控制方法。器件運(yùn)行通過(guò)一個(gè)SPI串行接口控制。輸出電流(扭矩)、步進(jìn)模式、衰減模式和堵轉(zhuǎn)檢測(cè)功能都可以通過(guò)SPI串行接口進(jìn)行編程。
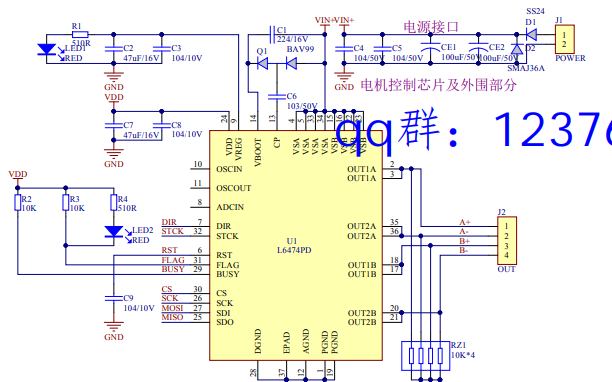
二、電原理圖
三、封裝形式及引出端功能
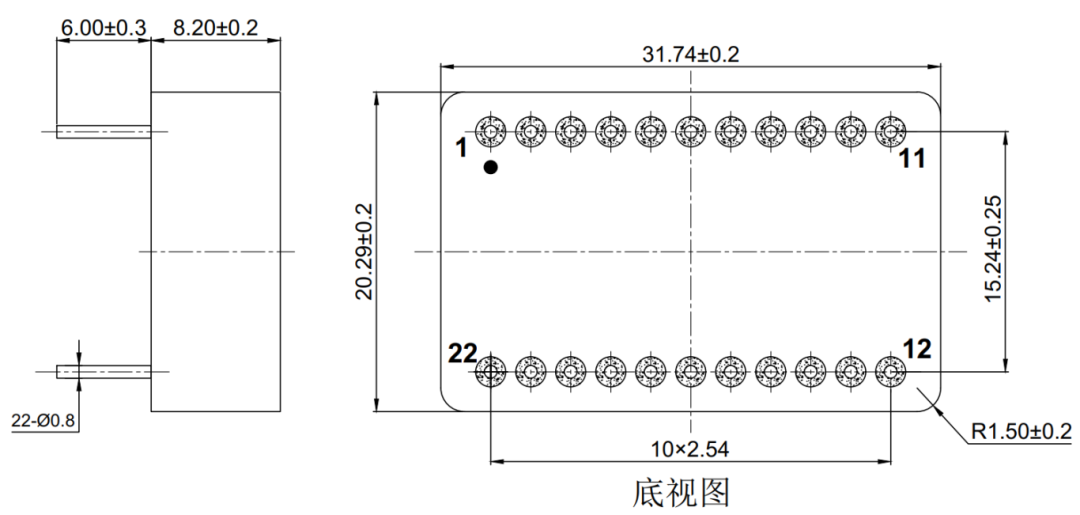
2.1封裝形式
采用BOX3220-22P全密封金屬直插封裝(選型HJ4205),下圖是封裝尺寸圖。
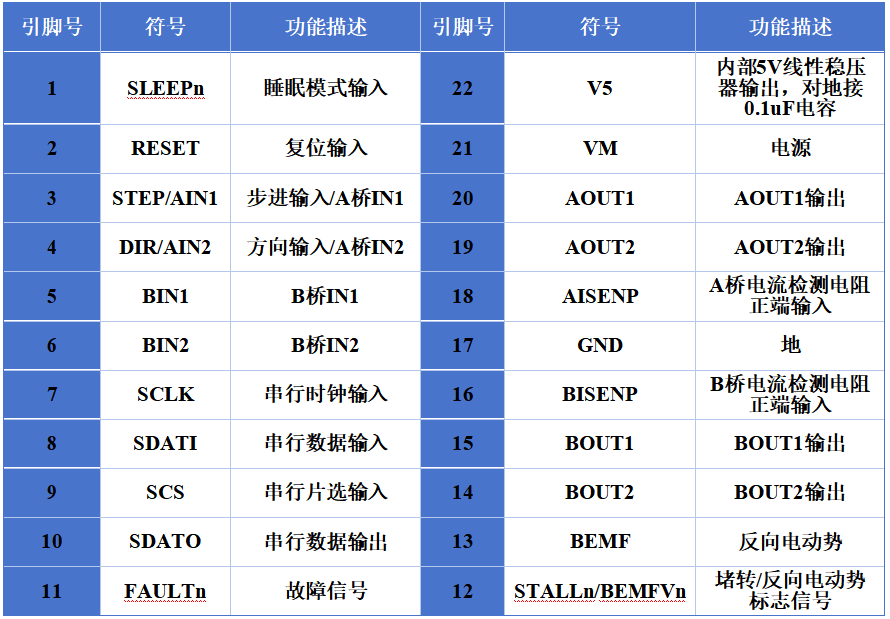
2.2.引出端功能
四、 絕對(duì)最大額定值

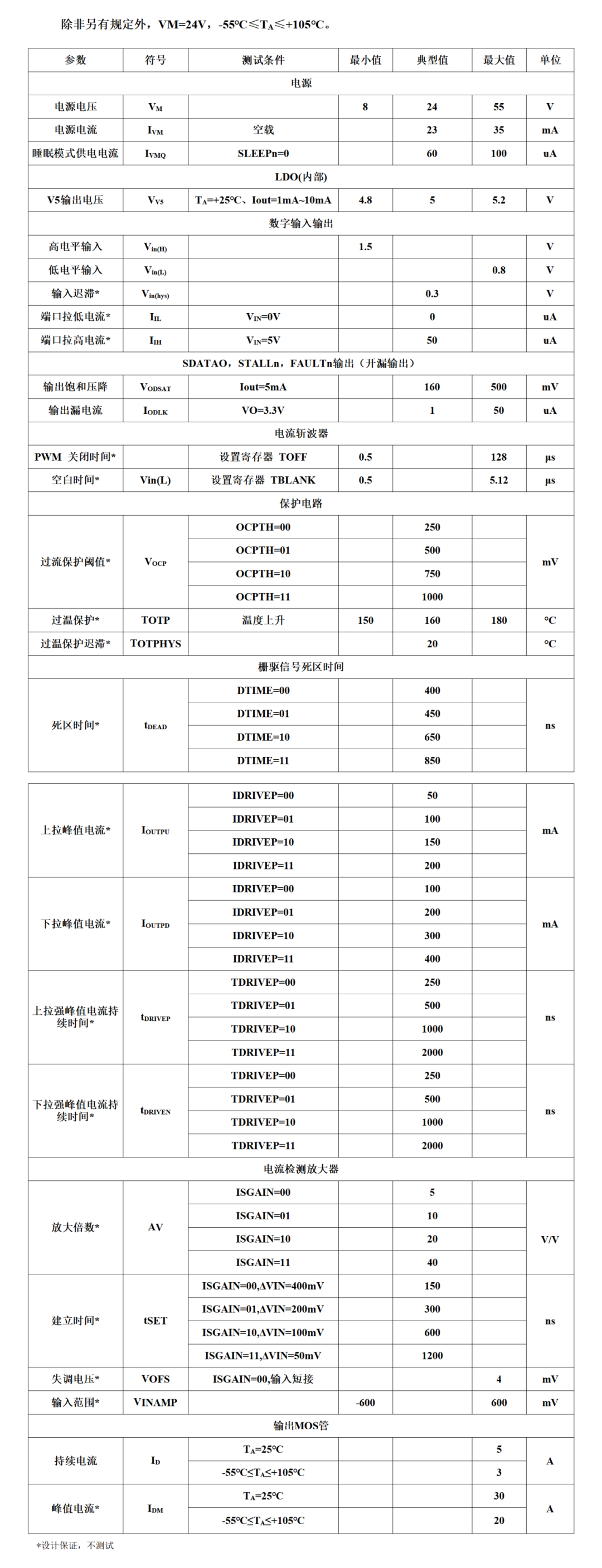
五、電特性
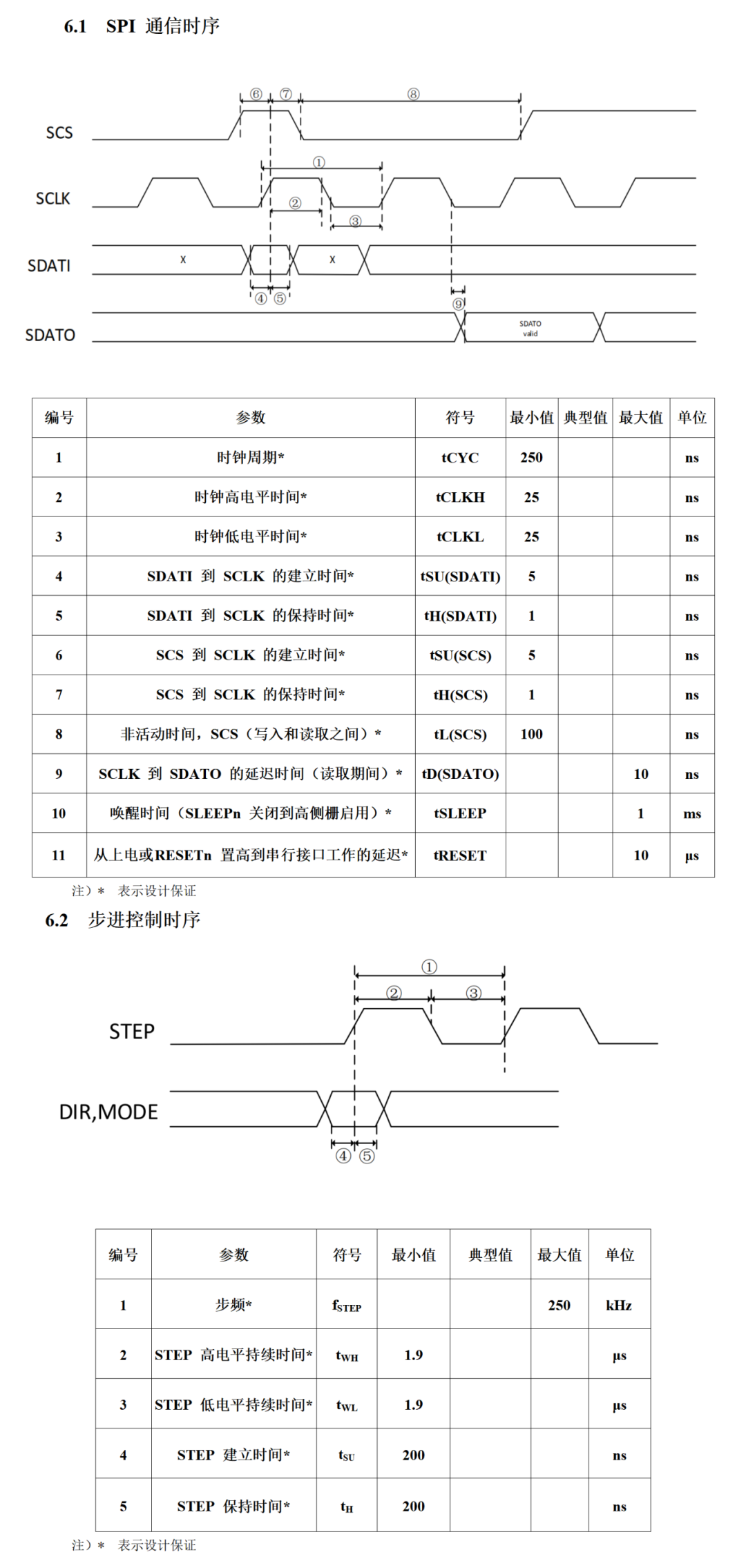
六、 邏輯時(shí)序圖
七、 功能描述
7.1 復(fù)位
芯片內(nèi)部有用于監(jiān)測(cè)VM引腳電壓的上電復(fù)位電路。如果VM 電壓低于UVLO 電壓,則器件復(fù)位。如果RESET 引腳置高電平,所有內(nèi)部邏輯都將被復(fù)位,且功率部分將被禁用,包括步進(jìn)和串行接口的所有輸入都將被忽略。
在退出RESET態(tài)時(shí)(置低電平),需要經(jīng)過(guò)一段時(shí)間(大約1 ms)才能使芯片恢復(fù)工作。
7.2 低功耗模式
將SLEEPn 引腳置低電平,使設(shè)備進(jìn)入低功耗狀態(tài)。在休眠模式下,電機(jī)驅(qū)動(dòng)電路被禁用,柵極驅(qū)動(dòng)調(diào)節(jié)器和電荷泵被禁用,所有模擬電路被置于低功率狀態(tài)。但設(shè)備中的數(shù)字電路仍在工作,因此仍然可以通過(guò)串行接口訪問(wèn)設(shè)備寄存器。
當(dāng)SLEEPn生效時(shí),RESET引腳不起作用。在RESET生效之前,必須退出低功耗模式。當(dāng)退出低功耗模式時(shí),需要經(jīng)過(guò)一段時(shí)間(大約1ms)才能應(yīng)用STEP輸入。
7.3 直接PWM輸入模式
通過(guò)在0x2寄存器中設(shè)置PWMMODE位,開(kāi)啟直接PWM模式,用PWM_MODESEL來(lái)選擇輸入模式邏輯。在直接PWM輸入模式下,AIN1、AIN2、BIN1和BIN2直接控制輸出驅(qū)動(dòng)器的狀態(tài),這樣可以驅(qū)動(dòng)最多兩個(gè)有刷直流電機(jī)。
PWM_MODESEL = 2’b00時(shí),xIN1和xIN2為常見(jiàn)的IN1,IN2控制邏輯,邏輯如下表:
| xIN1 | xIN2 | xOUT1 | xOUT2 |
| 0 | 0 | Z | Z |
| 0 | 1 | L | H |
| 1 | 0 | H | L |
| 1 | 1 | L | L |
PWM_MODESEL = 2’b01時(shí),xIN1為使能控制xEN,xIN2為方向控制xPH,xIN1=0時(shí),輸出高阻態(tài),邏輯如下表:
| xIN1 | xIN2 | xOUT1 | xOUT2 |
| 0 | 0 | Z | Z |
| 0 | 1 | Z | Z |
| 1 | 0 | L | H |
| 1 | 1 | H | L |
PWM_MODESEL = 2’b10時(shí),xIN1為使能控制xEN,xIN2為方向控制xPH,xIN1=0時(shí),輸出剎車態(tài),邏輯如下表:
| xIN1 | xIN2 | xOUT1 | xOUT2 |
| 0 | 0 | L | L |
| 0 | 1 | L | L |
| 1 | 0 | L | H |
| 1 | 1 | H | L |
PWM_MODESEL = 2’b11時(shí),xIN1為使能控制xEN,xIN2為方向控制xPH,邏輯如下表:
| xIN1 | xIN2 | xOUT1 | xOUT2 |
| 0 | 0 | Z | Z |
| 0 | 1 | L | L |
| 1 | 0 | L | H |
| 1 | 1 | H | L |
如果在直接PMW模式下使用混合或自動(dòng)混合衰減模式,它們將應(yīng)用于每個(gè)周期,因?yàn)殡娏髯兓畔⒉豢捎谩?/p>
在直接PWM模式下,電流控制電路(Torque)處于開(kāi)啟狀態(tài),仍可用TORGUE寄存器縮放電流,仍可使用0x1寄存器的ISGAIN位來(lái)設(shè)置ISEN檢測(cè)放大器增益。
通過(guò)電機(jī)繞組的電流由可編程固定關(guān)斷時(shí)間的PWM電流調(diào)節(jié)電路進(jìn)行調(diào)節(jié)。當(dāng)H橋被啟用時(shí),繞組電流以一定速率上升,此速率取決于繞組的直流電壓、電感以及反電動(dòng)勢(shì)的大小,一旦電流達(dá)到電流斬波閾值,電橋會(huì)在固定的時(shí)間段內(nèi)禁用電流,該時(shí)間段可通過(guò)寫(xiě)入關(guān)寄存器中的TOFF位在500ns和128μs之間進(jìn)行編程。關(guān)閉時(shí)間到達(dá)后,電橋重新啟用,開(kāi)始另一個(gè)PWM周期。
斬波電流由比較器設(shè)置,比較器將電流檢測(cè)電阻器的電壓與參考電壓進(jìn)行比較,電流檢測(cè)電阻器連接到xISENx引腳,且其電壓由電流檢測(cè)放大器進(jìn)行放大,電流檢測(cè)放大器可在控制寄存器中編程。在PWM模式下驅(qū)動(dòng)時(shí),斬波電流計(jì)算如下:
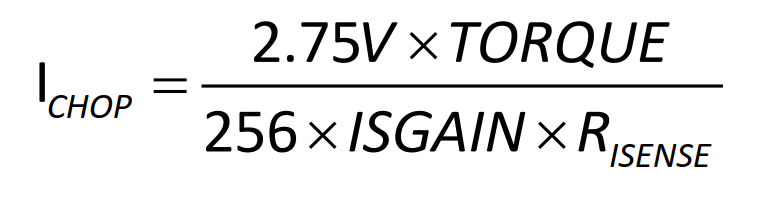
滿標(biāo)度VREF設(shè)置為2.75V。其中TORQUE是轉(zhuǎn)矩位的設(shè)置,ISGAIN是ISENSE放大器(5x、10x、20x或40x)的可編程增益。
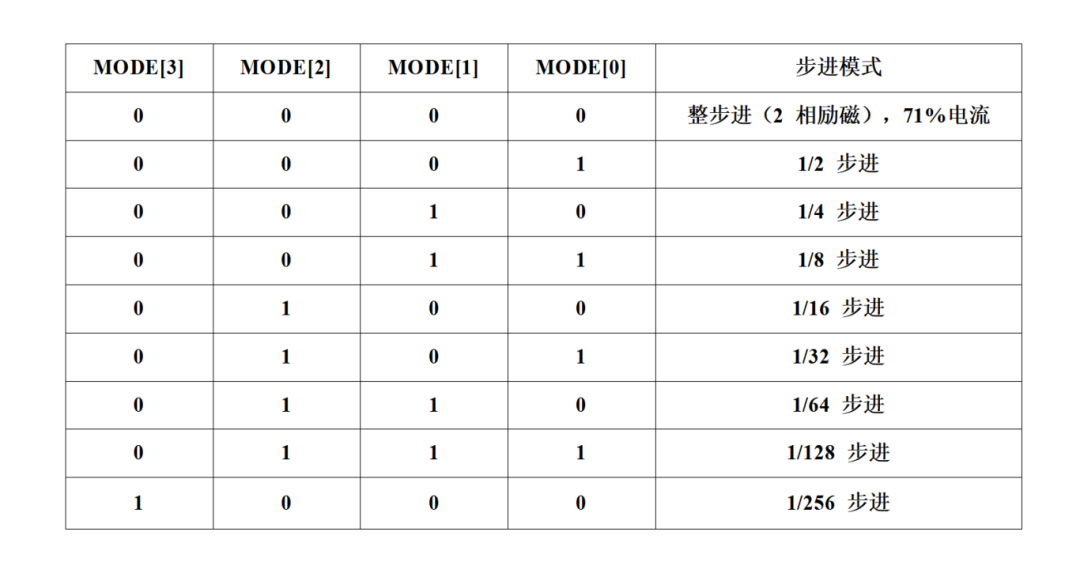
7.4 微步控制STEP/DIR輸入控制模式
HJ4205中的內(nèi)置分度器邏輯允許多種不同的步進(jìn)配置。0x0寄存器中的MODE位用于配置步進(jìn)細(xì)分,邏輯如下:
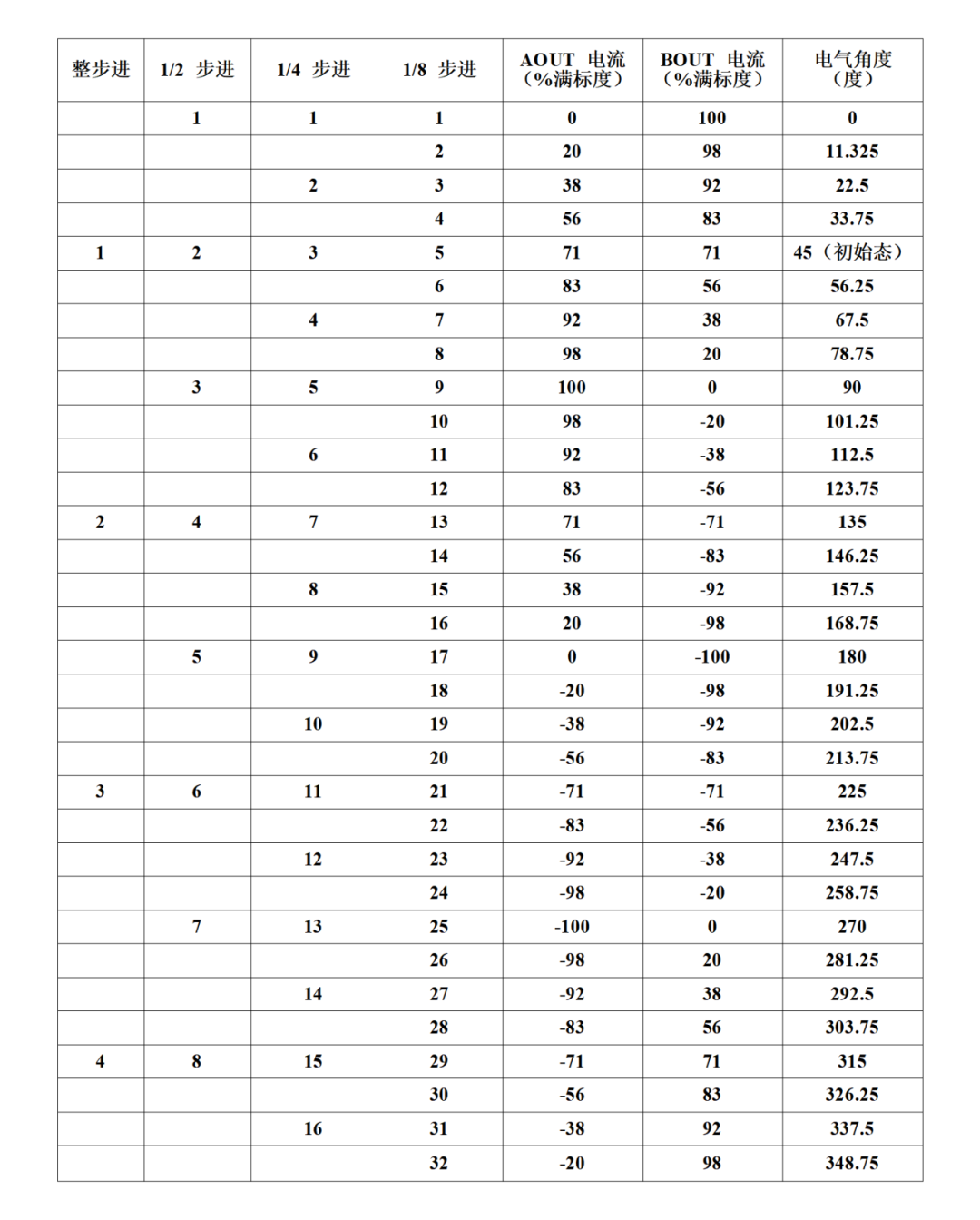
下表顯示了整步進(jìn)到1/8步進(jìn)模式的相對(duì)電流和步進(jìn)方向。更高的微步分辨率遵循相同的模式。
AOUT電流是電氣角度的正弦;BOUT電流是電氣角度的余弦。復(fù)位的狀態(tài)為45°位置,此狀態(tài)在上電或使用RESETn時(shí)進(jìn)入。
在STEP輸入的每個(gè)上升沿,或每次在向0x0寄存器中的RSTEP位寫(xiě)入‘1’后,分度計(jì)將進(jìn)入下一個(gè)狀態(tài)。DIR引腳接高且RDIR(0x0地址)置0,或DIR引腳接低且RDIR置‘1’,為正轉(zhuǎn)。DIR引腳接低且RDIR置0,或DIR引腳接高且RDIR置‘1’,則反轉(zhuǎn)。正電流定義為xOUT1為正,相對(duì)的xOUT2為負(fù)。
如果在步進(jìn)過(guò)程中改變了步進(jìn)細(xì)分,分度計(jì)將在下一個(gè)步進(jìn)的上升沿變?yōu)樾录?xì)分的下一個(gè)有效狀態(tài)。
八、典型應(yīng)用
HJ4205步進(jìn)電機(jī)驅(qū)動(dòng)電路典型應(yīng)用電路。
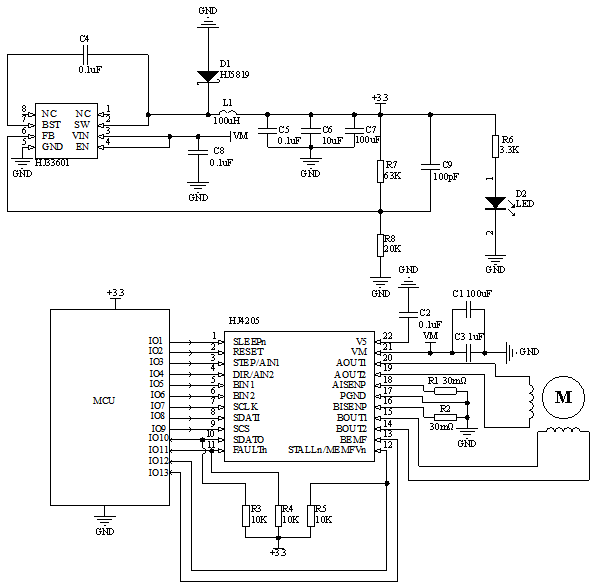
典型應(yīng)用圖
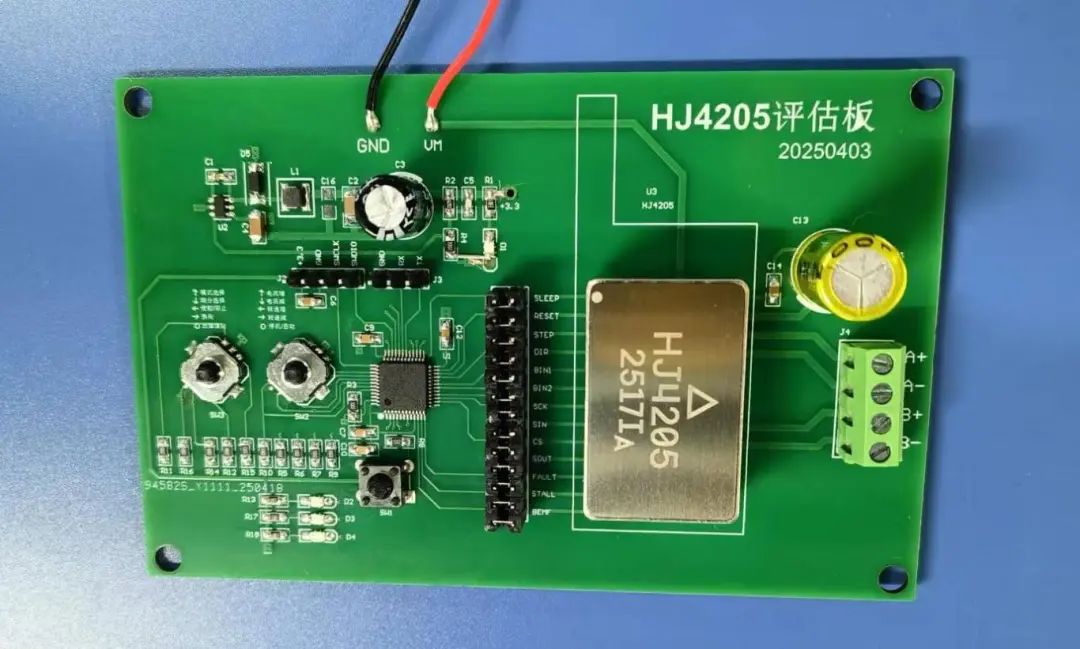
評(píng)估板實(shí)物圖
-
MOSFET
+關(guān)注
關(guān)注
150文章
8392瀏覽量
219177 -
控制器
+關(guān)注
關(guān)注
114文章
17028瀏覽量
183349 -
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
152文章
3162瀏覽量
149323 -
驅(qū)動(dòng)電路
+關(guān)注
關(guān)注
155文章
1581瀏覽量
109730
原文標(biāo)題:HJ4205步進(jìn)電機(jī)驅(qū)動(dòng)電路
文章出處:【微信號(hào):hangjingic,微信公眾號(hào):航晶微電子】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
ULN2003步進(jìn)電機(jī)驅(qū)動(dòng)原理及應(yīng)用程序步進(jìn)電機(jī)驅(qū)動(dòng)原理及應(yīng)用
35步進(jìn)電機(jī)驅(qū)動(dòng)問(wèn)題
使用Arduino和A4988步進(jìn)驅(qū)動(dòng)器模塊控制NEMA 17步進(jìn)電機(jī) 相關(guān)資料分享
tb6600步進(jìn)電機(jī)驅(qū)動(dòng)器說(shuō)明書(shū)
A4988步進(jìn)電機(jī)驅(qū)動(dòng)器是如何工作的?
LT2221步進(jìn)電機(jī)驅(qū)動(dòng)電路
C060214步進(jìn)電機(jī)驅(qū)動(dòng)器
Tb6560步進(jìn)電機(jī)驅(qū)動(dòng)板
IHM01A1步進(jìn)電機(jī)驅(qū)動(dòng)板的電路原理圖免費(fèi)下載
NS8A25步進(jìn)電機(jī)驅(qū)動(dòng)器模塊資料
如何測(cè)試TB6600步進(jìn)電機(jī)驅(qū)動(dòng)器控制器和步進(jìn)電機(jī)

Arduino CNC電機(jī)擴(kuò)展板詳解(A4988驅(qū)動(dòng)42步進(jìn)電機(jī))
STM32驅(qū)動(dòng)28BYJ-48步進(jìn)電機(jī)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論