 RISC-V JTAG:開啟MCU 芯片調試之旅
RISC-V JTAG:開啟MCU 芯片調試之旅
在當今電子科技飛速發展的時代, MCU 芯片成為眾多企業追求技術突破與創新的關鍵領域。而芯片的調試過程則是確保其性能與可靠性的重要環節。本文以國科安芯自研 AS32A601為例,旨在詳細記錄基于 RISC-V 架構的 MCU 芯片JTAG 調試過程及操作,為后續類似調試工作提供詳實參考的依據,助力研發團隊高效推進芯片研發進程。
RISC-V 架構以其開源、模塊化等優勢在 MCU 芯片領域嶄露頭角。JTAG(Joint Test Action Group)調試技術作為芯片調試的主流手段之一,為我們深入芯片內部、精準定位問題提供了有力支持。
我們將深入記錄 MCU 芯片AS32A601在 JTAG 調試過程中的具體操作步驟。從硬件連接的細節,包括如何正確設置 JTAG 接口與仿真器的連接,確保信號傳輸的穩定與準確;到軟件調試工具的配置與使用技巧,如調試環境的搭建、調試指令的編寫與執行等,都將一一呈現。同時,針對調試過程中可能遇到的常見問題,如通信故障、數據讀取錯誤等,也會詳細分析原因并提供相應的解決方法。
通過這份詳盡的記錄,我們期望為后續的芯片研發與調試工作積累寶貴經驗,幫助研發團隊更加高效、精準地完成自研 MCU 芯片的開發與優化任務。這不僅有助于提升芯片產品的質量和性能,也對推動整個團隊在 RISC-V 架構領域的技術進步具有重要意義,為未來在復雜芯片設計與調試領域的深入探索奠定堅實基礎。
JTAG簡介
接口
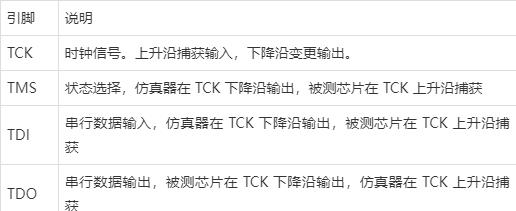
TCK 應接下拉電阻,按照 IEEE 1149.1 的要求,被測芯片在 TCK 保持低電平的情況下將保持原有的狀態,所以 TCK 應該拉低,確保在沒有接仿真器時 TCK 是低電平狀態。
TMS 應接上拉電阻,根據 TAP 狀態機,任意狀態下,只要 TMS 保持高電平 5 個時鐘,那么就會進入復位狀態,所以 TMS 拉高是安全的。
TAP狀態機
所有JTAG操作的源頭都是由一個具有16個狀態的同步狀態機控制。該控制器使用TCK作為時鐘,使用TMS作為輸入。如果需要復位時使用TRSTN。狀態的跳轉是由TMS輸入1或0決定。 JTAG的TAP狀態機
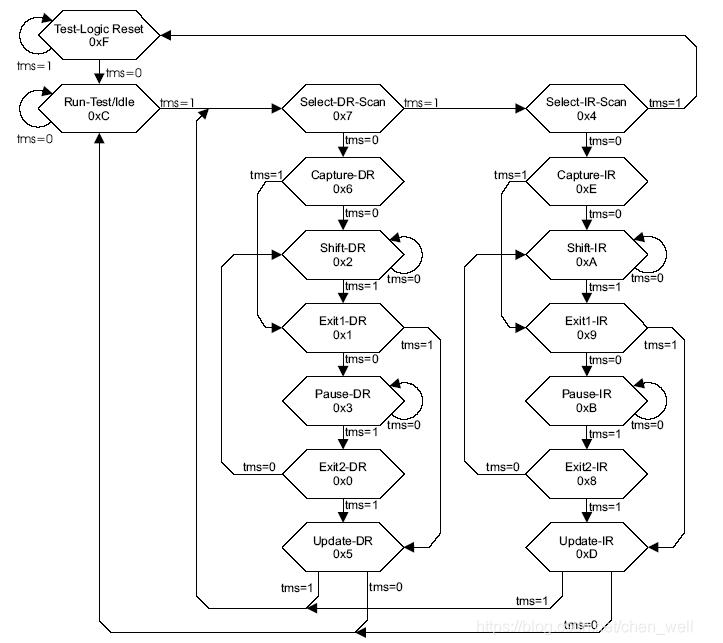
狀態機介紹: 寄存器可以分為兩大類,數據寄存器和指令寄存器。 標識有DR的這些狀態是用來訪問數據寄存器的,標識有IR的這些狀態是用來訪問指令寄存器的。
常用的狀態說明如下所示:
- Test-Logic-Select(TLS):系統上電后,TAP Controller 自動進入該狀態。在該狀態下,測試部分的邏輯電路全部被禁用,以保證芯片核心邏輯電路的正常工作。通過 TRST 信號也可以對測試邏輯電路進行復位,使得 TAP Controller 進入 Test-Logic Reset 狀態。TRST 是可選的一個信號接口,這是因為在 TMS 上連續加 5 個 TCK 脈沖寬度的“1”信號也可以對測試邏輯電路進行復位,使得 TAP Controller 進入 Test-Logic Reset 狀態。所以,在不提供 TRST信號的情況下,也不會產生影響。在該狀態下,如果 TMS 一直保持為“1”,TAP Controller將保持在 Test-Logic Reset 狀態下;如果 TMS 由“1”變為“0”(在 TCK 的上升沿觸發), 將使 TAP Controller 進入 Run-Test/Idle 狀態。
- Run-Test/Idle:這個是 TAP Controller 在不同操作間的一個中間狀態。這個狀態下的動作取決于當前指令寄存器中的指令。有些指令會在該狀態下執行一定的操作,而有些指令在該狀態下不需要執行任何操作。在該狀態下,如果 TMS 一直保持為“0”,TAP Controller 將一直保持在 Run-Test/Idle 狀態下;如果 TMS 由“0”變為“1”(在 TCK 的上升沿觸發),將使 TAPController 進入 Select-DR-Scan 狀態。
- Select-DR-Scan:這是一個臨時的中間狀態。如果 TMS 為“0” (在 TCK 的上升沿觸發),TAP Controller進入 Capture-DR 狀態,后續的系列動作都將以數據寄存器作為操作對象;如果 TMS 為“1” (在 TCK 的上升沿觸發),TAP Controller 進入 Select-IR-Scan 狀態。
- Capture-DR:當 TAP Controller 在這個狀態中,且當前指令是SAMPLE/PRELOAD指令,那么邊界掃描寄存器BSR在TCK信號的上升沿捕 獲輸入管腳的數據。如果此時不是SAMPLE/PRELOAD指令,那么BSR保持它們先前的值,另外BSR的值被放入連接在TDI和TDO管腳之間的移 位寄存器中。如果 TMS 為“0” (在 TCK 的上升沿觸發),TAP Controller 進入 Shift-DR 狀態;如果 TMS 為“1” (在 TCK 的上升沿觸發),TAPController 進入 Exit1-DR 狀態。
- Shift-DR:在這個狀態中,由 TCK 驅動,每一個時鐘周期,被連接在 TDI 和 TDO 之間的數據寄存器將從 TDI 接收一位數據,同時通過 TDO 輸出一位數據。如果 TMS 為“0” (在 TCK的上升沿觸發),TAP Controller 保持在 Shift-DR 狀態; 如果 TMS 為“1” (在 TCK 的上升沿觸發),TAP Controller 進入到 Exit1-DR 狀態。假設當前的數據寄存器的長度為 4。如果 TMS 保持為 0,那在 4 個 TCK 時鐘周期后,該數據寄存器中原來的 4 位數據(一般是在 Capture-DR 狀態中捕獲的數據)將從 TDO 輸出來;同時該數據寄存器中的每個寄存器單元中將分別獲得從 TDI 輸入的 4 位新數據。
- Exit1-DR:Exit1-DR是TAP控制器的一個臨時狀態,如果TMS信號在下一個TCK上升沿處于高電平,TAP進入Update-DR狀態;如果TMS信號在下一個TCK上升沿處于低電平,則TAP進入Pause-DR狀態。處于Exit1-DR狀態時,指令不會被改變。
- Pause-DR: Pause-DR狀態允許TAP控制器暫時停止TDI-移位寄存器-TDO串行通道的移位操作。處于Pause-DR狀態時,指令不會被改變。如果TMS信號在下一個TCK上升沿處于高電平,TAP進入Exit2-DR狀態;如果TMS信號處于低電平,則TAP一直保持暫停狀態。
- Exit2-DR:Exit2-DR也是TAP控制器的臨時狀態,如果TMS信號在下一個TCK上升沿處于高電平,TAP進入Update-DR狀態,結束掃描操作;如果TMS信號在下一個TCK上升沿處于低電平,則TAP重新進入Shift-DR狀態。處于Exit2-D狀態時,指令不會被改變。
- Update-DR:在 Update-DR 狀態下,由 TCK 上升沿驅動,數據寄存器當中的數據將被加載到相應的芯片管腳上去,用以驅動芯片。在該狀態下,如果 TMS 為“0”,TAP Controller 將回到Run-Test/Idle 狀態;如果 TMS 為“1”,TAP Controller 將進入 Select-DR-Scan 狀態。
- Select-IR-Scan:這是一個臨時的中間狀態。如果 TMS 為“0” (在 TCK 的上升沿觸發),TAP Controller進入 Capture-IR 狀態,后續的系列動作都將以指令寄存器作為操作對象;如果 TMS 為“1” (在 TCK 的上升沿觸發),TAP Controller 進入 Test-Logic Reset 狀態。
- Capture-IR:當 TAP Controller 在這個狀態中,在 TCK 的上升沿,一個特定的邏輯序列將被裝載到指令寄存器中去。如果 TMS 為“0” (在 TCK 的上升沿觸發),TAP Controller 進入 Shift-IR狀態;如果 TMS 為“1” (在 TCK 的上升沿觸發),TAP Controller 進入 Exit1-IR 狀態。
- Shift-IR:在這個狀態中,由 TCK 驅動,每一個時鐘周期,被連接在 TDI 和 TDO 之間的指令寄存器將從 TDI 接收一位數據,同時通過 TDO 輸出一位數據。如果 TMS 為“0” (在 TCK的上升沿觸發),TAP Controller 保持在 Shift-IR 狀態; 如果 TMS 為“1” (在 TCK 的上升沿觸發),TAP Controller 進入到 Exit1-IR 狀態。假設指令寄存器的長度為 4。如果TMS 保持為 0,那在 4 個 TCK 時鐘周期后,指令寄存器中原來的 4bit 長的特定邏輯序列(在 Capture-IR 狀態中捕獲的特定邏輯序列)將從 TDO 輸出來,該特定的邏輯序列可以用來判斷操作是否正確;同時指令寄存器將獲得從 TDI 輸入的一個 4bit 長的新指令。
- Exit1-IR:Exit1-IR是TAP控制器的一個臨時狀態,如果TMS信號在下一個TCK上升沿處于高電平,TAP進入Update-IR狀態;如果TMS信號在下一個TCK上升沿處于低電平,則TAP進入Pause-IR狀態。處于Exit1-IR狀態時,指令不會被改變。
- Pause-IR:Pause-IR狀態允許TAP控制器暫時停止TDI-移位寄存器-TDO串行通道的移位操作。處于Pause-IR狀態時,指令不會被改變。如果TMS信號在下一個TCK上升沿處于高電平,TAP進入Exit2-IR狀態;如果TMS信號處于低電平,則TAP一直處于暫停狀態。
- Exit2-IR:Exit2-IR也是TAP控制器的臨時狀態,如果TMS信號在下一個TCK上升沿處于高電平,TAP進入Update-IR狀態,結束掃描操作;如果TMS信號在下一個TCK上升沿處于低電平,則TAP重新進入Shift-IR狀態。處于Exit2-D狀態時,指令不會被改變。
- Update-IR:在這個狀態中,在 Shift-IR 狀態下輸入的新指令將被用來更新指令寄存器。
JTAG訪問的一般過程:
- 系統上電,TAP Controller 進入 Test-Logic Reset 狀態,然后依次進入:Run-Test/Idle → Select-DR-Scan → Select-IR-Scan →Capture-IR →Shift-IR →Exit1-IR→Update-IR,最后回到 Run-Test/Idle 狀態。在 Capture-IR 狀態中,一個特定的邏輯序列被加載到指令寄存器當中;然后進入到 Shift-IR 狀態。在 Shift-IR 狀態下,通過 TCK 的驅動,可以將一條特定的指令送到指令寄存器當中去。每條指令都將確定一條相關的數據寄存器。然后從 Shift-IR →Exit1-IR → Update-IR。在 Update-IR 狀態,剛才輸入到指令寄存器中的指令將用來更新指令寄存器。最后,進入到 Run-Test/Idle 狀態,指令生效,完成對指令寄存器的訪問。
- 當前可以訪問的數據寄存器由指令寄存器中的當前指令決定。要訪問由剛才的指令選定的數據寄存器,需要以 Run-Test/Idle 為起點,依次進入 Select-DR-Scan →Capture-DR →Shift-DR →Exit1-DR →Update-DR,最后回到 Run-Test/Idle 狀態。在這個過程當中,被當前指令選定的數據寄存器會被連接在 TDI 和 TDO 之間。通過TDI 和 TDO,就可以將新的數據加載到數據寄存器當中去,同時,也可以捕獲數據寄存器中的數據。具體過程如下。在 Capture-DR 狀態中,由 TCK 的驅動,芯片管腳上的輸出信號會被“捕獲”到相應的邊界掃描寄存器單元中去。這樣,當前的數據寄存器當中就記錄了芯片相應管腳上的輸出信號。接下來從 Capture-DR 進入到Shift-DR 狀態中去。在 Shift-DR 狀態中,由 TCK 驅動,在每一個時鐘周期內,一位新的數據可以通過 TDI 串行輸入到數據寄存器當中去,同時,數據寄存器可以通過TDO 串行輸出一位先前捕獲的數據。在經過與數據寄存器長度相同的時鐘周期后,就可以完成新信號的輸入和捕獲數據的輸出。接下來通過 Exit1-DR 狀態進入到Update-DR 狀態。在 Update-DR 狀態中,數據寄存器中的新數據被加載到與數據寄存器的每個寄存器單元相連的芯片管腳上去。最后,回到 Run-Test/Idle 狀態,完成對數據寄存器的訪問。
debug寄存器
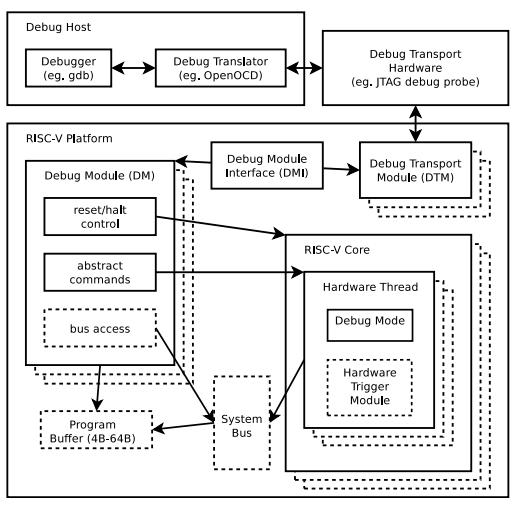
目前RISC-V的官方調試上位機是openocd,調試工具可以是JLink或者CMSIS-DAP,RISCV調試框架如圖所示。 RISC-V調試系統框架
DTM模塊
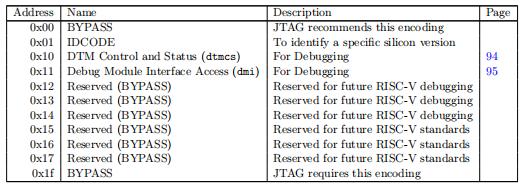
作為DTM使用的JTAG tap必須具有至少5位的IR。當TAP時,IR必須默認為00001,選擇IDCODE指令。DTM模塊的寄存器定義如圖所示。 DTM寄存器
IDCODE寄存器(0x01)
當TAP狀態機復位時,IR寄存器的值默認為0x01,即選擇的是IDCODE寄存器。IDCODE寄存器的每一位含義如圖5所示。IDCODE是只讀寄存器。 IDCODE寄存器
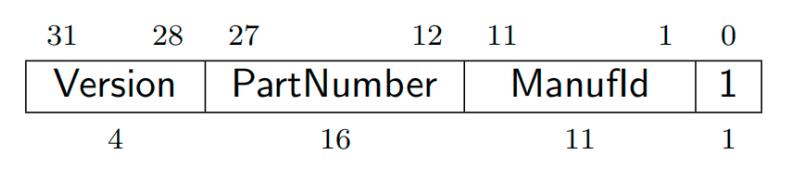
Version:只讀,版本號,可為任意值。 PartNumber:只讀,可為任意值。 Manufld:只讀,廠商號,遵循JEP106標準分配,實際中可為任意值,只要不與已分配的廠商號沖突即可。
DTM控制和狀態寄存器(dtmcs,0x10)
dtmcs寄存器

dmihardreset:DTM模塊硬復位,寫1有效。 dmireset:清除出錯,寫1有效。 idle:只讀,JTAG 主機在Run-Test-Idle狀態停留的時鐘周期數,0表示不需要進入Run-Test-Idle狀態,1表示進入 Run-Test-Idle狀態后可以馬上進入下一個狀態,以此類推。 dmistat:只讀,上一次操作的狀態。0表示無出錯,1或者2表示操作出錯,3表示操作還未完成。 abits:只讀,dmi寄存器中address域的大小(位數)。 version:只讀,實現所對應的spec版本,0表示0.11版本,1表示0.13版本。
DM模塊接口訪問寄存器(dmi,0x11)
dmi寄存器

address:可讀可寫,DM寄存器的長度(位數)。 data:可讀可寫,往DM寄存器讀、寫的數據,固定為32位。 op:可讀可寫,讀或者寫這個域時有不同的含義。當寫這個域時,寫0表示忽略address和data的值,相當于nop操作;寫1表示從address指定的寄存器讀數據;寫2表示把data的數據寫到address指定的寄存器。寫3為保留值。當讀這個域時,0表示上一個操作正確完成;1為保留值;2表示上一個操作失敗,這個狀態是會被記住的,因此需要往dtmcs寄存器的dmireset域寫1才能清除這個狀態。3表示上一個操作還未完成。
在Update-DR狀態時,DTM開始執行op指定的操作。在Capture-DR狀態時,DTM更新data域。
BYPASS寄存器(0x1f)
只讀,長度為1,值固定為0。
DM模塊
DM模塊的寄存器都為32位,定義如圖所示(只描述主要寄存器)。
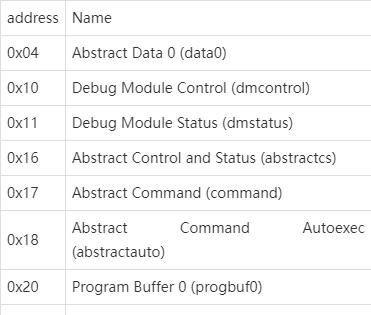
data0寄存器(0x04)
此寄存器是用于abstract command的數據寄存器,長度為32位,可讀可寫。
dmcontrol寄存器(0x10)
dmcontrol寄存器
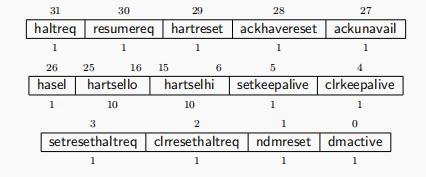
haltreq:只寫,寫1表示halt(暫停)當前hart(hart表示CPU核,存在多核的情況)。 resumereq:只能寫1,寫1表示resume(恢復)當前hart,即go。 hartreset:可讀可寫,寫1表示復位DM模塊,寫0表示撤銷復位,這是一個可選的位。 ackhavereset:只能寫1,寫1表示清除當前hart的havereset狀態。 hasel:可讀可寫,0表示當前只有一個已經被選擇了的hart,1表示當前可能有多個已經被選擇了的hart。 hartsello:可讀可寫,當前選擇的hart的低10位。1位表示一個hart。 hartselhi:可讀可寫,當前選擇的hart的高10位。1位表示一個hart。如果只有一個hart,那么hasel的值為0, hartsello的值為1,hartselhi的值為0。 setresethaltreq:只能寫1,寫1表示當前選擇的hart復位后處于harted狀態。 clrresethaltreq:只能寫1,寫1表示清除setresethaltreq的值。 ndmreset:可讀可寫,寫1表示復位整個系統,寫0表示撤銷復位。 dmactive:可讀可寫,寫0表示復位DM模塊,寫1表示讓DM模塊正常工作。正常調試時,此位必須為1。
dmstatus寄存器(0x11)
dmstatus寄存器
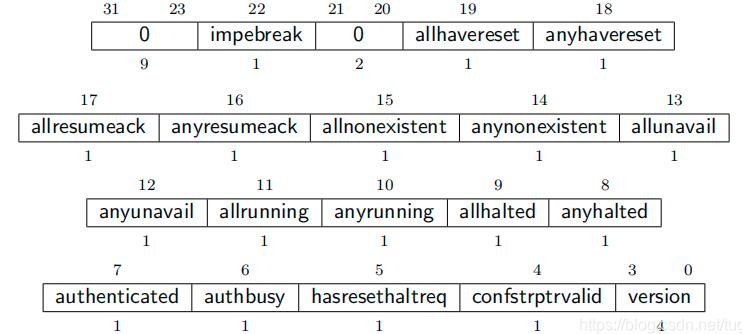
impebreak:1表示執行完progbuf的指令后自動插入一條ebreak指令,這樣就可以節省一個progbuf。當progbufsize的 值為1時,此值必須為1。 allhavereset:1表示當前選擇的hart已經復位。 anyhavereset:1表示當前選擇的hart至少有一個已經復位。 allresumeack:1表示當前選擇的所有hart已經應答上一次的resume請求。 anyresumeack:1表示當前選擇的hart至少有一個已經應答上一次的resume請求。 allnonexistent:1表示當前選擇的hart不存在于當前平臺。 anynonexistent:1表示至少有一個選擇了的hart不存在于當前平臺。 allunavail:1表示當前選擇的hart都不可用。 anyunavail:1表示至少有一個選擇了的hart不可用。 allrunning:1表示當前選擇的hart都處于running狀態。 anyrunning:1表示至少有一個選擇了的hart處于running狀態。 allhalted:1表示當前選擇的hart都處于halted狀態。 anyhalted:1表示至少有一個選擇了的hart處于halted狀態。 authenticated:0表示使用DM模塊之前需要進行認證,1表示已經通過認證。 authbusy:0表示可以進行正常的認證,1表示認證處于忙狀態。 hasresethaltreq:1表示DM模塊支持復位后處于halted狀態,0表示不支持。 confstrptrvalid:1表示confstrptr0~3寄存器保存了配置字符串的地址。 version:0表示DM模塊不存在,1表示DM模塊的版本為0.11,2表示DM模塊的版本為0.13。
abstractcs寄存器(0x16)
abstractcs寄存器

progbufsize:只讀,program buffer的個數,取值范圍為0~16,每一個的大小為32位。 busy:只讀,1表示abstract命令正在執行,當寫command寄存器后該位應該馬上被置位直到命令執行完成。 cmderr:可讀、只能寫1,cmderr的值僅當busy位為0時有效。0表示無錯誤,1表示正在操作command、abstractcs、 data或者progbuf寄存器,2表示不支持當前命令,3表示執行命令時出現異常,4表示由于當前hart不可用,或者不是處 于halted/running狀態而不能被執行,5表示由于總線出錯(對齊、訪問大小、超時)導致的錯誤,7表示其他錯誤。寫1清 零cmderr。 datacount:只讀,所實現的data寄存器的個數。
command寄存器(0x17)
當寫這個寄存器時,相應的操作就會被執行,command寄存器只能寫。 command寄存器
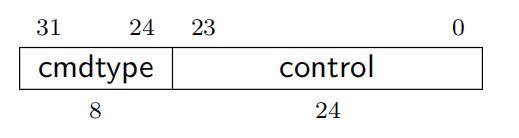
cmdtype:只寫,命令類型,0為表示訪問寄存器,1表示快速訪問,2表示訪問內存。 control:只寫,不同的命令類型有不同的含義,說明如下。
當cmdtype為0時,control定義下圖所示。

cmdtype:值為0。 aarsize:2表示訪問寄存器的最低32位,3表示訪問寄存器的最低64位,4表示訪問寄存器的最低128位。如果大于實際寄存器的大小則此次訪問是失敗的。 aarpostincrement:1表示成功訪問寄存器后自動增加regno的值。 postexec:1表示執行progbuf里的內容(指令)。 transfer:0表示不執行write指定的操作,1表示執行write指定的操作。 write:0表示從指定的寄存器拷貝數據到arg0指定的data寄存器。1表示從arg0指定的data寄存器拷貝數據到指定的寄存器。 regno:要訪問的寄存器。
綜上,可知:
- 當write=0,transfer=1時,從regno指定的寄存器拷貝數據到arg0對應的data寄存器。
- 當write=1,transfer=1時,從arg0對應的data寄存器拷貝數據到regno指定的寄存器。
- 當aarpostincrement=1時,將regno的值加1。
- 當postexec=1時,執行progbuf寄存器里的指令。
當cmdtype為1時,control定義下圖所示。
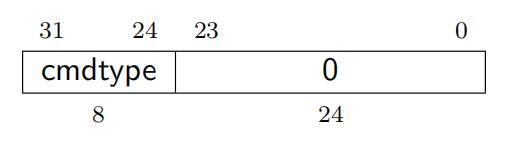
cmdtyte:值為1。
此命令會執行以下操作:
- halt住當前hart。
- 執行progbuf寄存器里的指令。
- resume當前hart。
當cmdtype為2時,control定義下圖所示。
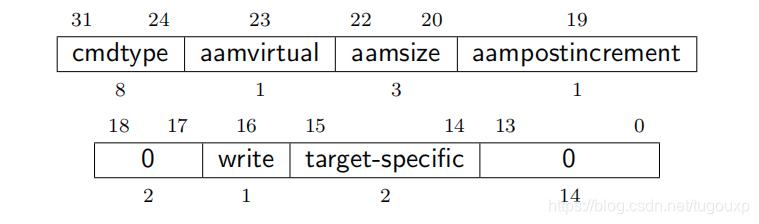
cmdtype:值為2。 aamvirtual:0表示訪問的是物理地址,1表示訪問的是虛擬地址。 aamsize:0表示訪問內存的低8位,1表示訪問內存的低16位,2表示訪問內存的低32位,3表示訪問內存的低64位,4表示訪問內存的低128位。 aampostincrement:1表示訪問成功后,將arg1對應的data寄存器的值加上aamsize對應的字節數。 write:0表示從arg1指定的地址拷貝數據到arg0指定的data寄存器,1表示從arg0指定的data寄存器拷貝數據到arg1指 定的地址。 target-specific:保留。
綜上,可知:
- 當write=0時,從arg1指定的地址拷貝數據到arg0指定的data寄存器。
- 當write=1時,從arg0指定的data寄存器拷貝數據到arg1指定的地址。
- 當aampostincrement=1時,增加arg1對應的data寄存器的值。
abstractauto寄存器(0x18)
abstractauto寄存器
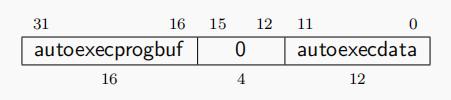
autoexecprogbuf:當該字段中的一個位為1時,對對應進程單詞的讀寫訪問會導致DM在進程訪問完成后將命令中的當前值再次寫入其中。 autoexecdata:當該字段中的一個位為1時,對相應數據字的讀寫訪問會導致DM在數據訪問完成后將命令中的當前值再次寫入那里。
progbuf0寄存器(0x20)
progbuf0寄存器
progbuf寄存器必須提供program buffer的寫訪問權限,debugger可通過這些寄存器對program buffer讀訪問,讀不支持時返回0。 progbufsize 表示從progbuf0開始實現多少progbuf寄存器。 在執行抽象命令時訪問這些寄存器時,如果cmderr為0,則會將其設置為1(busy)。 在busy時嘗試編寫它們不會改變它們的值。
操作流程
debug讀寫內存和寄存器步驟
Reading Memory
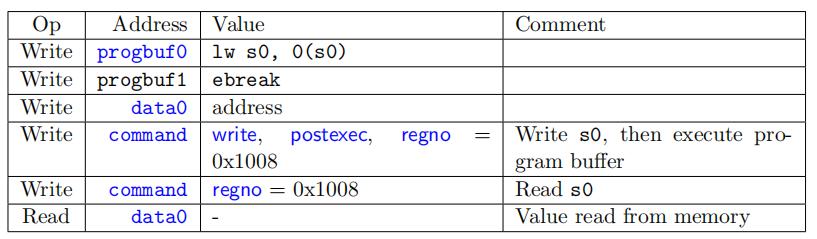
使用 Program Buffer 從內存中讀取數據
program buffer 方式讀取單字
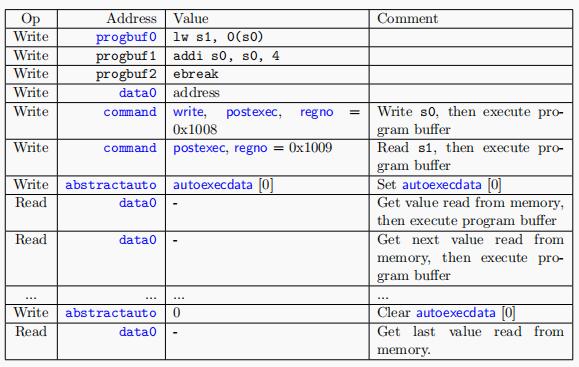
program buffer 方式讀取塊
Writing Memory
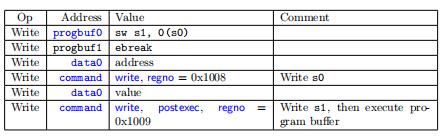
使用 Program Buffer 往內存中寫入數據
program buffer 方式寫單字
program buffer方式寫塊
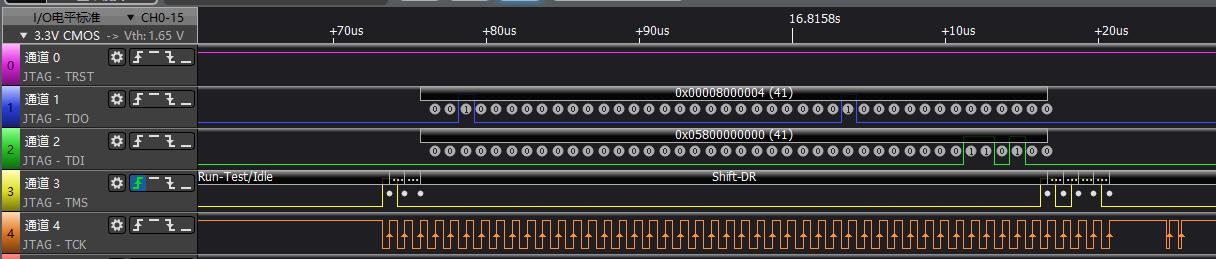
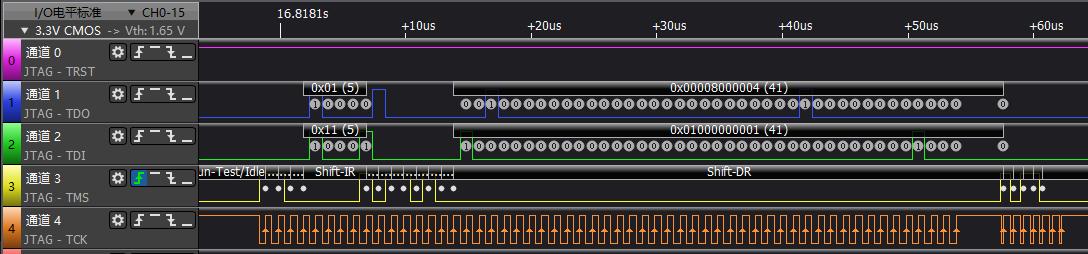
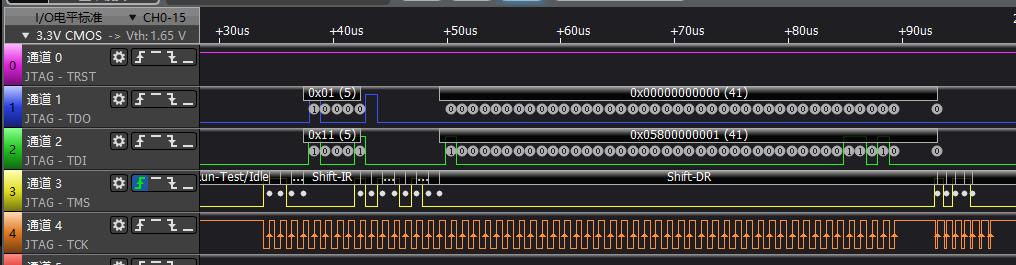
debug實際運行狀態
邏輯分析儀解析JTAG協議配置

注:下圖TDI為仿真器輸入信號,TDO為仿真器輸出信號。
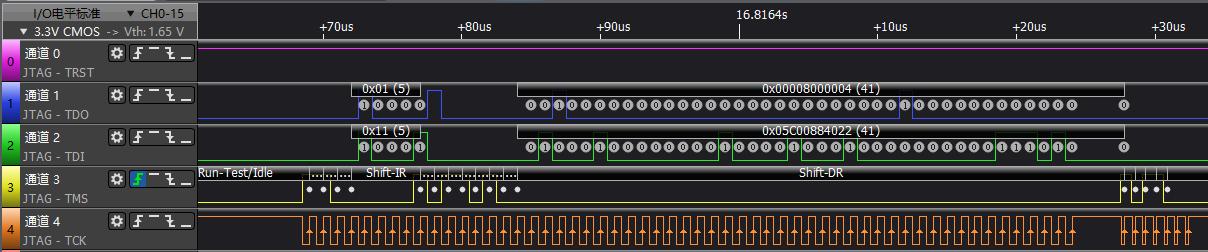
讀取內存步驟
本例:讀取0x20000000地址的數據,以openocd指令操作為例(指令操作為mdw 0x20000000),返回數據為0x100002bc。
- 此波形為操作dmi(0x11)寄存器,向progbuf0寄存器寫入lw s0, 0(s0)指令(以gcc/openocd操作為例)。

2.此波形為nop操作。

3.此波形為操作dmi(0x11)寄存器,向progbuf1寄存器寫入ebreak指令(以gcc/openocd操作為例)。

- 此波形為nop操作。

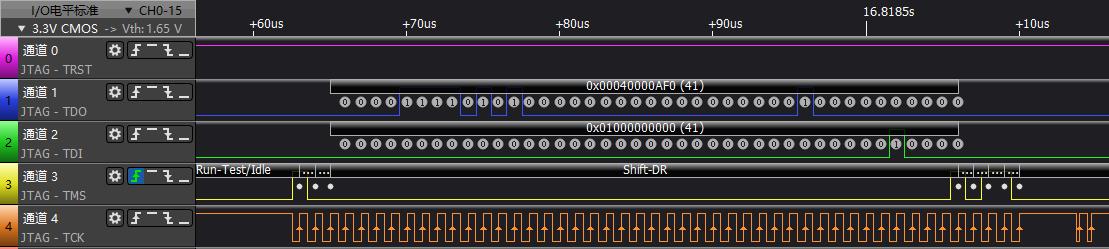
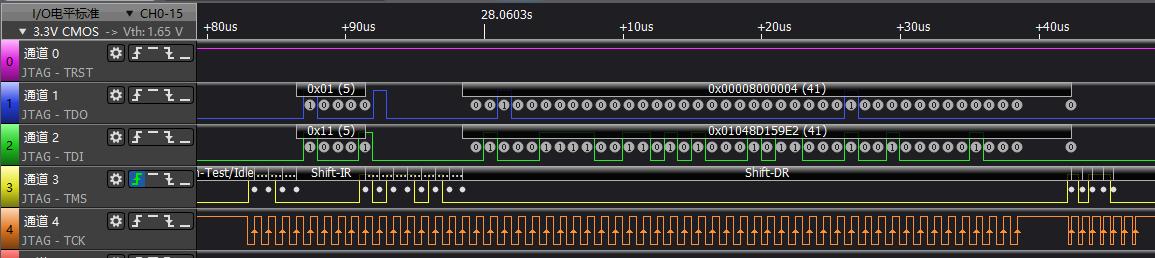
- 此波形為操作dmi(0x11)寄存器,向data0寄存器寫數據0x20000000,表示要寫入要讀取的地址。

- 此波形為nop操作。

- 此波形為操作dmi(0x11)寄存器,從而操作command(0x17)寄存器,從而進行執行progbuf寄存器里的指令、data0數據寫入s0的操作。

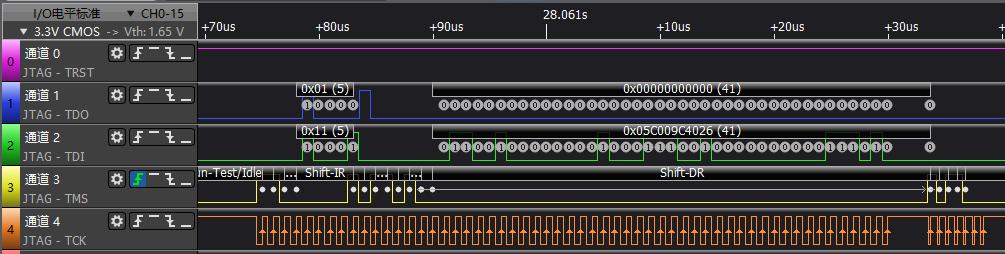
- 此波形為操作dmi(0x11)寄存器,發送讀取abstractcs(0x16)寄存器操作。

- 此波形為nop操作,通過TDO線數據獲取狀態正常。
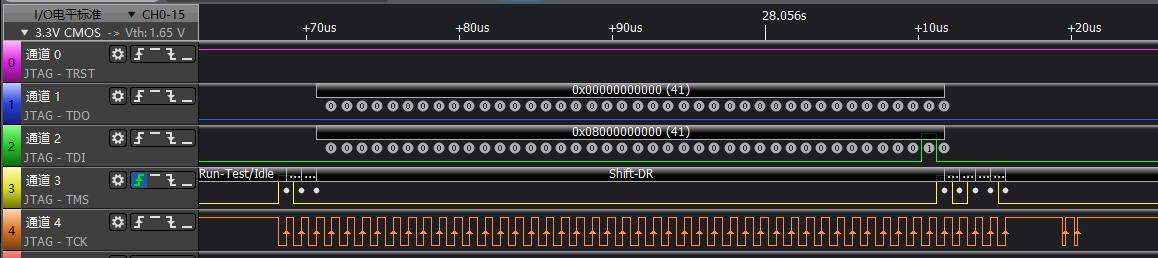
- 此波形為操作dmi(0x11)寄存器,從而操作command(0x17)寄存器,從而進行將s0的數據拷貝到data0的操作。
- 此波形為操作dmi(0x11)寄存器,發送讀取abstractcs(0x16)寄存器操作。

- 此波形為nop操作,通過TDO線數據獲取狀態正常。
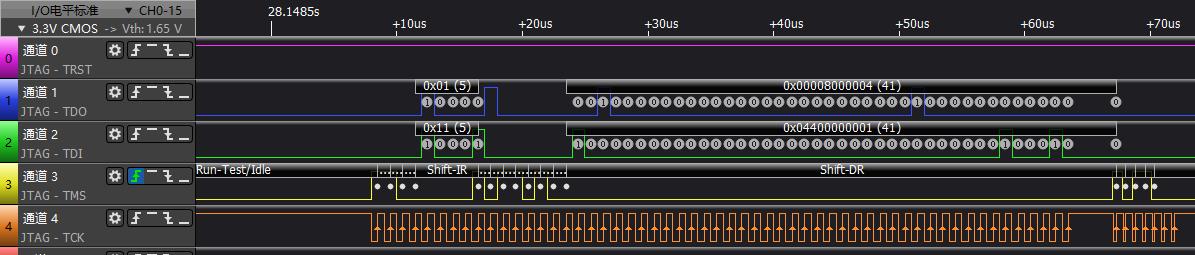
- 此波形為操作dmi(0x11)寄存器,進行讀取data0寄存器的操作。
- 此波形為nop操作,通過TDO線數據獲取要讀取內存地址的數據:0x100002bc。
上述流程描述了通過Program Buffer方式讀內存操作,實際操作中會加入讀取狀態寄存器等操作,確保操作正常。mdw實際操作還會加入保存恢復s0寄存器,執行fence指令等,這里不進行過多描述。
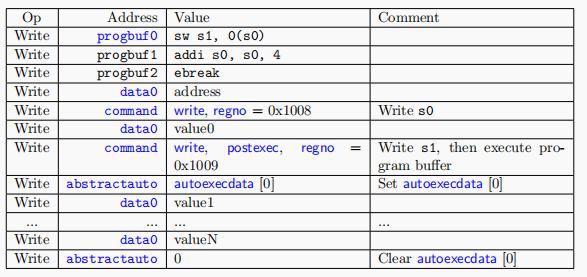
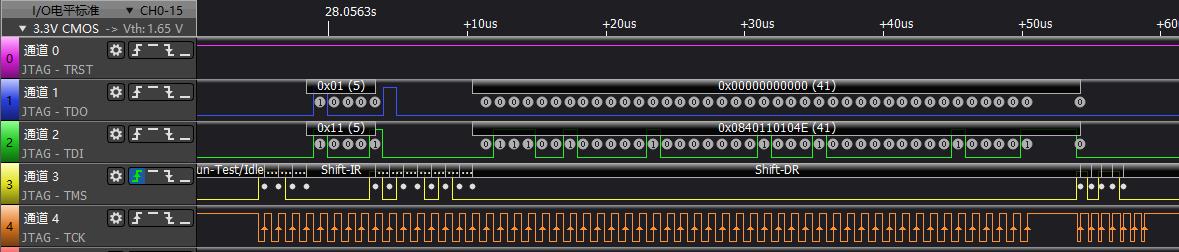
寫內存步驟
本例:向0x20000000地址寫入數據0x12345678,以openocd指令操作為例(指令操作為mww 0x20000000 0x12345678)。
- 此波形為操作dmi(0x11)寄存器,向progbuf0寄存器寫入sw s1,0(s0)指令(以gcc/openocd操作為例)。

- 此波形為nop操作
3.此波形為操作dmi(0x11)寄存器,向progbuf1寄存器寫入addi s0, s0, 4指令(以gcc/openocd操作為例)。
- 此波形為nop操作

- 此波形為操作dmi(0x11)寄存器,向data0寄存器寫數據0x20000000,表示要寫入要操作的地址。

- 此波形為nop操作

- 此波形為操作dmi(0x11)寄存器,從而操作command(0x17)寄存器,從而進行data0數據寫入s0的操作。

- 此波形為操作dmi(0x11)寄存器,發送讀取abstractcs(0x16)寄存器操作。
- 此波形為nop操作,通過TDO線數據獲取狀態正常。

- 此波形為操作dmi(0x11)寄存器,向data0寄存器寫數據0x12345678,表示要寫入0x20000000地址的數據。
- 此波形為nop操作

- 此波形為操作dmi(0x11)寄存器,從而操作command(0x17)寄存器,從而進行執行progbuf寄存器里的指令,data0數據寫入s1的操作。
- 此波形為操作dmi(0x11)寄存器,發送讀取abstractcs(0x16)寄存器操作。

- 此波形為nop操作,通過TDO線數據獲取狀態正常。

上述流程描述了通過Program Buffer方式寫內存操作,實際操作中會加入讀取狀態寄存器等操作,確保操作正常。mww實際操作還會加入保存恢復s0寄存器,執行fence指令等,這里不進行過多描述。
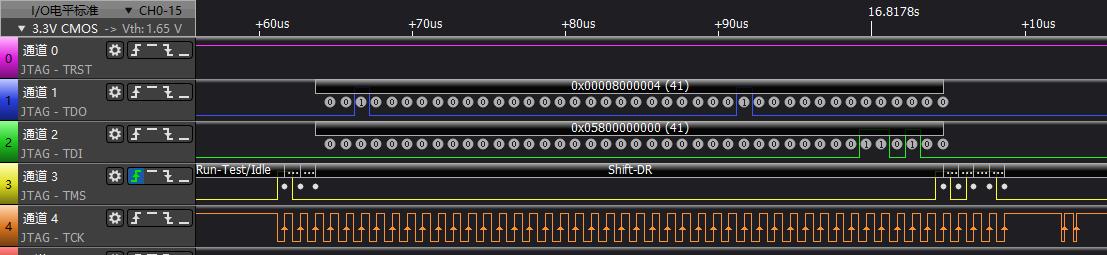
此流程為可以連續操作內存的一個步驟,下面將進行操作的講解:
- sw s1,0(s0)指令為將s1的值寫入到s0地址。
- addi s0, s0, 4指令為執行一次操作后地址增加4字節。
- 此步驟沒有ebreak指令,能正常運行的原因是debug支持執行完progbuf指令自動添加ebreak指令,此設置可以查看dmstatus(0x11)寄存器impebreak位。
- 連續操作步驟為編程abstractauto(0x18)寄存器,可以在寫完data0寄存器后自動執行progbuf的指令。
連接時循環查詢狀態
- 此波形為操作dmi(0x11)寄存器,發送讀取dmstatus(0x11)寄存器操作。

- 此波形為nop操作,通過TDO線數據獲取cpu狀態為halted狀態。
審核編輯 黃宇
-
芯片
+關注
關注
459文章
51965瀏覽量
434041 -
mcu
+關注
關注
146文章
17742瀏覽量
358620 -
RISC-V
+關注
關注
46文章
2463瀏覽量
48081
發布評論請先 登錄
關于RISC-V芯片的應用學習總結
risc-v芯片在電機領域的應用展望
RISC-V架構及MRS開發環境回顧
淺聊深入淺出RISC-V調試
RISC-V Summit China 2024 青稞RISC-V+接口PHY,賦能RISC-V高效落地







 工商網監
工商網監
評論