 第十五屆松山湖中國IC創新高峰論壇圓滿落幕
第十五屆松山湖中國IC創新高峰論壇圓滿落幕

近日,第十五屆松山湖中國IC創新高峰論壇(以下簡稱“松山湖論壇”) 在東莞市松山湖凱悅酒店順利召開。本屆論壇由中國半導體行業協會集成電路設計分會和芯原股份聯合主辦,以“面向‘具身智慧機器人’的創新IC新品推介”為主題,發布了10款代表中國IC先進設計水平,與具身智慧機器人需求密切結合的本土IC新品。
松山湖論壇致力于打造國內最具影響力的中國IC新品集中發布平臺,推動芯片設計企業與系統廠商和投資機構的對接。本次論壇邀請了130多位來自IC企業、軟件及系統公司、投資機構、政府、協會及研究機構的決策者和專業媒體出席,同時超過18,000人觀看了線上直播。論壇當天的媒體原創報道數超過80篇。
中國半導體行業協會集成電路設計分會副理事長,芯原股份創始人、董事長兼總裁戴偉民博士首先回顧了2024年推介的十款芯片產品的市場表現情況,他表示,松山湖論壇已經連續舉辦15屆,每年推介約10款國產芯片。過去的14年,松山湖論壇共推介了86家本土IC企業的118款國產IC產品,推介產品的總量產率達到了94%。這些企業在參加松山湖論壇之后上市的比率達到19.8%,還有4家正在上市進程中。未來,松山湖論壇將繼續為集成電路產業搭建高效的資源對接平臺,幫助優秀的國產IC發展壯大。
中國半導體行業協會集成電路設計分會理事長魏少軍,東莞市人民政府顧問、東莞市生物技術產業發展有限公司董事長宋濤,松山湖黨工委委員、管委會總工程師馮瑜平分別為本屆論壇開幕致辭,高度肯定了松山湖論壇在促進產業交流與技術創新方面的積極作用,并表達了對論壇的支持與期待。
在產品推介環節,來自芯馳科技、愛芯元智、萬有引力等十家本土IC企業的嘉賓分別進行了精彩宣講,現場推介了十款面向“具身智慧機器人”的創新IC新品。
北京芯馳半導體科技股份有限公司CTO孫鳴樂
D9-Max是一款符合車規標準,面向具身智能應用的高性能、高可靠性SoC。其采用多核異構計算架構,集成了高性能CPU、GPU、NPU、DSP、ISP、視頻處理單元,并內置MCU,具備豐富的通信接口。D9-Max可支持運動控制、路徑規劃、感知、語音交互、傳感器數據處理、數據采集、人機交互等功能,可滿足具身智能在復雜場景下的多樣化需求。
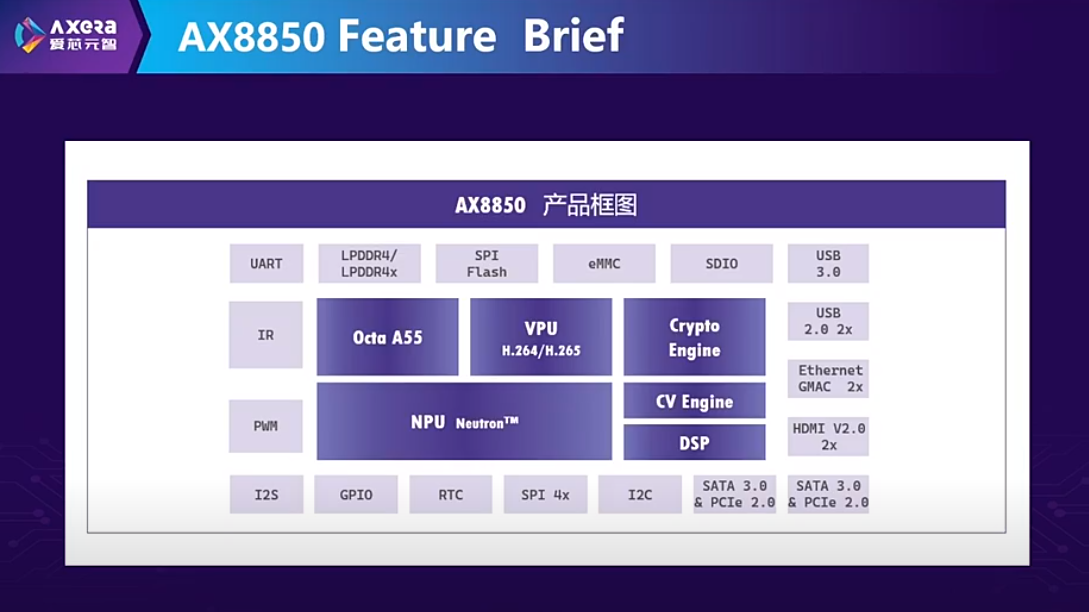
02AX8850:以邊緣算力,讓具身智能觸手可及
愛芯元智半導體股份有限公司聯合創始人、副總裁劉建偉
AX8850是一款具備高算力和高能效比的數字芯片,集成了八核Arm Cortex-A55 CPU,24TOPS@INT8高算力的NPU,支持H.264/265編解碼、64位LPDDR4x、eMMC v5.1/ SPI Flash,提供2路Ethernet、1路USB 3.0、2路USB 2.0及2路HDMI輸出等豐富接口,能夠廣泛應用于消費電子產品的智能化升級,充分釋放邊緣計算的性能潛力。
03EB100:面向機器人/XR應用的低功耗空間渲染和顯示專用芯片
萬有引力 (寧波) 電子科技有限公司市場營銷總監張武龍
EB100是萬有引力自研的12nm低功耗空間渲染和顯示專用芯片,支持3D模型實時重建與驅動、多視角平行渲染、光場顯示圖像處理與增強,以及多圖層空間混疊的核心功能。該芯片能夠在三維空間中以逼真、生動的方式呈現實時互動的面容,可廣泛應用于具身智能、AI助手、陪伴機器人和遠程替身等場景,顯著提升設備的親和力與沉浸感。
04VS859:面向具身智能的高性能“感算控”一體化芯片
上海為旌科技有限公司市場總監黃智
VS859是一款面向高端視覺計算與應用場景的SoC,具備高度集成、多模態接入、高性能計算和低時延等特性,能夠滿足未來邊端側大模型部署的需求,廣泛適用于智慧城市、智能機器人等多種應用場景。
05HPM6E8Y:先楫實時控制芯片驅動的機器人關節“芯”時代
上海先楫半導體科技有限公司嵌入式專家及產品總監費振東
HPM6E8Y系列MCU內置RISC-V雙核處理器,集成2個以太網PHY收發器,支持EtherCAT從控制器和多達3個外部端口的時間敏感網絡千兆以太網交換機。同時,其還擁有32通道高分辨率PWM輸出和∑-?數字濾波器。這款芯片專為機器人關節的高精度運動控制設計,具備高性能、高集成、小封裝及簡便易用等優勢。
06G32R501:面向具身機器人的高性能、高安全實時控制MCU/DSP
珠海極海半導體有限公司實時控制MCU/DSP產品線高級產品經理盧鵬升
G32R501是全球首款基于雙核Arm Cortex-M52的高端實時控制MCU,采用Arm v8.1-M架構,支持Arm HeliumTM矢量擴展,并內置極海自研的紫電數學指令擴展單元,能夠大幅提升算法執行效率,降低CPU訪問時延。該芯片基于40nm eFlash工藝,集成了高性能感知模塊、豐富控制外設和靈活互聯系統,廣泛適用于新能源光伏、工業自動化、商業電源、新能源汽車等中高端應用。
07M7000:機器人關節的高性能實時處理器到控制算法的生態閉環
廣東匠芯創科技有限公司市場總監徐勇
M7000系列是六款專為工業控制、光伏能源與數字電源等行業應用設計的高性能DSP實時處理器,基于國產自主高算力的RISC-V內核,主頻高達552MHz,具備強大的處理性能與高效的運行能力。該系列還提供大容量內存及豐富的外設接口,能夠應對各類實時數據處理與控制需求,適用于多種工業應用場景,廣泛覆蓋泛工業等關鍵領域。
08SC533HGS:賦能高端機器視覺的高性能全局快門圖像傳感器
思特威 (上海) 電子科技股份有限公司高級銷售總監宗翔
SC533HGS基于思特威SmartGS-2 Plus技術平臺,具備高感度、高動態范圍、高幀率等多重性能優勢,其出色的成像效果可滿足多類型智能機器人在避障識別與3D定位感知等場景中的需求,助力實現更精準的環境交互。
09KTM5900:高精度智能磁性傳感器芯片賦能機器人與自動化
泉州昆泰芯微電子科技有限公司CEO武建峰
KTM59系列是一款基于隧道磁阻效應 (TMR) 的高速高精度磁性編碼器芯片,專為工業自動化和精密控制設計,具備高靈敏度和穩定性。其支持單對極磁鐵實現超高分辨率角度測量,具備超高精度、高速響應和自適應校準能力。
10TS-PON Gen2:面向人形機器人的通感控一體全光網芯片
鵬瞰集成電路 (杭州) 有限公司首席市場營銷官江曉峰
TS-PON Gen2是一款面向人形機器人內部網絡的全光網芯片,融合感知、通信與控制于一體,全面滿足高帶寬視覺傳輸、低時延伺服控制以及全網時鐘同步等關鍵需求,有效簡化機器人內部復雜的線速架構,提升系統集成度、可靠性和靈活性。
在壓軸的圓桌論壇環節,戴博士與樂聚(深圳)機器人技術有限公司算法總監何治成,上海昱感微電子科技有限公司CEO蔣宏,演講嘉賓江曉峰、劉建偉,以及烏鎮智庫理事長張曉東圍繞“具身智慧機器人的產業化之路”,共同探討了具身智慧機器人的發展路徑及難點、落地過程中的關鍵障礙與突破方向、機器人關節芯片的設計挑戰,以及人形機器人落地的應用場景等話題。臺下的嘉賓也踴躍參與投票,表達了自己的觀點,與臺上嘉賓進行了實時互動。
以下為圓桌論壇部分嘉賓觀點及
現場投票結果
問題一:“具身+智慧”是機器人公司讓機器人設備變得智能化;“智慧+具身”是AI公司把大模型具身化,例如OpenAI和Google自己做機器人或投資機器人公司的方式。如何看待這兩種方式的產業化路徑?
部分嘉賓觀點:
張曉東:當前存在兩種路徑,一是以“具身+智慧”為導向,如馬斯克所倡導,優先追求通用場景,目標是通過降低使用門檻實現廣泛應用;二是“智慧+具身”,代表傳統工業機器人路線,或是在大語言模型發展驅動下,嘗試將其植入機器人系統。從技術演進經驗來看,專用場景更可能率先落地,但通用方案在大模型推動下展現出長期潛力,值得持續觀察。
劉建偉:從數據的可獲得性和經濟性來看,通用路線更具優勢。人形機器人的物理數據采集成本可分攤,且其所依賴的通用算力與硬件具備規模化效應,與人工智能的發展路徑類似。
投票:下述哪種發展路徑,更容易實現商業化落地?(單選)
65%以上的現場嘉賓認為機器人企業+智慧,面向場景應用更容易實現商業化落地
問題二:當前具身智慧機器人落地過程中的關鍵障礙是“大腦”的能力不足,還是“小腦”的能力不足,還是機器人本體不夠好?應該從哪個環節開始突破,為什么?
部分嘉賓觀點:
何治成:當前業界對“大腦智能”(如大模型、規劃算法) 關注較多,但真正制約具身智能機器人落地的,是“小腦能力”的缺位——也就是復雜運動的實時控制、協調與執行。人形機器人本體結構復雜,動作控制缺乏統一標準,導致算法遷移難、泛化差;與此同時,產業鏈上下游尚未建立穩定協同機制,制約了場景落地與成本優化。
投票:您認為具身智慧機器人產業化最大的難點是?(選三項)
現場嘉賓投票選出的前三項分別為:跨場景/任務泛化遷移難、可泛化高精準操作技能學習難、缺乏真實剛需場景驗證
問題三:目前,新能源車企積極布局機器人產業,并最大程度復用智駕芯片、傳感器、動力系統,以及工廠等資源。從邊緣AI芯片供應商角度來看,智慧汽車和具身智慧機器人對AI芯片有哪些差異化需求?面向具身智慧機器人應用的AI芯片應該主要關注哪些性能指標?
部分嘉賓觀點:
劉建偉:車與機器人在技術上一脈相承,均依賴算力的支撐,但機器人更強調通用算力和數據驅動。差異化需求在于機器人需適應多樣化的應用場景,特別強調算力的性價比、能效比和實時性 (如快速決策與控制能力),同時需要支持多模態融合 (如視覺、觸覺等) 的處理能力。
投票:支持具身智慧機器人的AI芯片應優先優化哪類指標?(選三項)
現場嘉賓投票選出的前三項分別為:實時處理能力 (低延遲)、傳感器接入與邊緣推理能力、模型兼容性與遷移性
問題四:高精度感知是否一定要求高成本傳感器?針對“感知-推理-行為”協同優化的方案,目前成熟度如何?存在哪些發展困境,如何突破?
部分嘉賓觀點:
蔣宏:高精度感知未必依賴高成本傳感器,例如激光雷達已降至幾百元,多傳感器融合已進入發展風口。當前的技術挑戰在于突破“模態墻”(統一語義空間)、“符號墻”(神經網絡轉符號知識) 和“因果墻”(統計轉因果推理)。感知層技術正快速推進 (如多模態融合),但推理與因果理解仍需突破。結合大語言模型與深度學習,將有助于提升物理因果推理能力。
投票:具身智慧機器人的傳感系統優化,應優先考慮哪類方向?(單選)
近七成的現場嘉賓投票選擇多模態融合 (視覺+慣性導航系統+力覺)
問題五:用于機器人關節的芯片有哪些設計挑戰?
部分嘉賓觀點:
費振東:關節的設計需要小型化、輕量化,且對芯片集成度、低功耗和實時控制能力有較高要求。不同廠商的技術路線多樣,通信協議復雜 (如以太網、工業自動化協議),并且需要支持異構網絡與多傳感器融合。同時,產業標準化不足,需產業鏈各方協作優化控制算法與硬件協同設計。
問題六:具身智慧機器人需要底層的基礎設施——網絡的支持,近幾年光纖上車也在驗證和布局中。針對機器人應用的網絡通信系統和芯片有什么痛點和特殊需求?從芯片的角度,應該重點關注哪些指標?
部分嘉賓觀點:
江曉峰:機器人應用的痛點主要集中在數據的高實時性和低延時傳輸 (例如動作控制指令),需要避免信號干擾并減輕線束重量。在此基礎上,特殊需求還包括確定性網絡 (確保關鍵數據優先傳輸)、高可靠性 (特別是在工業場景的應用),以及輕量化 (通過光纖替代銅線)。因此,芯片設計應重點關注低延時、高帶寬、抗干擾能力,并具備支持異構網絡的兼容性。
投票:針對具身智慧機器人的網絡通信系統和芯片,哪些指標更為重要?(選三項)
現場嘉賓投票選出的前三項分別為:實時傳輸能力 (低延遲和確定性)、線束的簡化和統一、高帶寬圖像傳輸能力
問題七:未來3年內,人形機器人最先落地的應用場景是什么?
部分嘉賓觀點:
張曉東:農業采摘 (場景成熟,無安全壓力)、高危環境作業 (如核電廠巡檢)、長者陪護 (老齡化剛需)。
何治成:工業場景搬運 (通用性強,適合替代枯燥勞動)、長者陪護、高危環境作業 (安全需求迫切)。
劉建偉:高危環境作業 (解放人力)、農業采摘 (類制造業場景)、家庭清潔和餐飲加工 (枯燥體力勞動)。
蔣宏:倉儲與物流搬運 (AGV技術成熟)、高危環境作業、長者陪護 (情感與數據監測價值)。
費振東:倉儲與物流搬運、工業流水線協作、安防與巡檢 (商業化落地快,成本可控)。
江曉峰:安防與巡檢 (技術可行)、工業流水線協作 (柔性化需求)、零售服務 (場景適配性強)。
投票:未來3年內,人形機器人最先落地的應用場景是什么?(選三項)
現場嘉賓投票選出的前三項分別為:倉儲與物流搬運、高危環境作業、安防與巡檢
此外,多家企業在論壇現場設置了展臺,展示了他們在具身智慧機器人領域的相關技術成果。
-
集成電路
+關注
關注
5423文章
12033瀏覽量
368204 -
機器人
+關注
關注
213文章
29697瀏覽量
212602 -
IC
+關注
關注
36文章
6117瀏覽量
179174 -
芯原
+關注
關注
0文章
111瀏覽量
11682
原文標題:第十五屆松山湖中國IC創新高峰論壇圓滿落幕
文章出處:【微信號:VeriSilicon,微信公眾號:芯原VeriSilicon】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
國產“HPM芯”賦能機器人關節,先楫半導體亮相松山湖IC創新論壇

三款高性能芯片亮相,面向具身智慧機器人應用
從云端到邊緣:三款國產芯片如何重新定義具身智慧機器人“大腦”
愛芯元智AX8850:以邊緣算力,讓具身智能觸手可及

思特威SC533HGS:賦能高端機器視覺的高性能全局快門圖像傳感器

第十五屆松山湖中國IC創新高峰論壇 “具身智能”國產芯片集體亮相

迅鐳激光亮相第十五屆鋼結構行業發展論壇
洲明科技顯示技術助力第十五屆全運會場館煥新
龍騰半導體第十五屆亞洲電源技術發展論壇精彩回顧
深度參與,共話未來 —— 吹田電氣亮相第十五屆亞洲電源技術發展論壇





 工商網監
工商網監
評論