") 智能車電磁組——基本控制篇
智能車電磁組——基本控制篇

智能車電磁組——基本控制篇
前言
電磁車的控制比較簡單,可以分為信號采集,舵機控制和電機控制三部分,電磁車的控制算法也主要圍繞這三部分進行,剛開始起步可能對這三個模塊的要求不高,但是隨著車速的不斷提高,需要不斷的對這三個模塊進行細化和深究。
濾波
什么是濾波
濾波(Wave filtering)是將信號中特定波段頻率濾除的操作,是抑制和防止干擾的一項重要措施。它可以從含有干擾的接收信號中提取有用信號,很大程度上保證了采集到的信號的真實性和穩(wěn)定性。
正因如此,濾波算法也成了在智能車控制中不可或缺的一種控制算法。
常見的軟件濾波
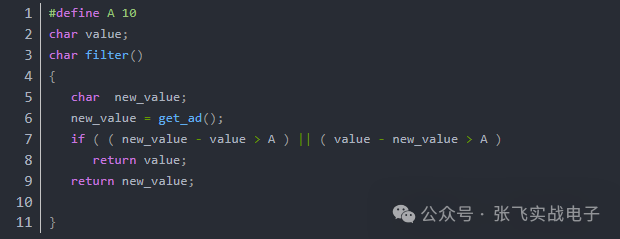
1. 限幅濾波(又稱程序判斷濾波法)
根據(jù)經(jīng)驗判斷,確定兩次采樣允許的最大偏差(設(shè)為A),每次檢測到新值時判斷
如果本次值與上次值之差小于等于A,則本次值無效。
如果本次值與上次值之差大于A,則本次值無效。放棄本次值,用上次值代替本次值。
優(yōu)點:能有效克服因偶然因素引起的脈沖干擾。
缺點:無法抑制那種周期性的干擾、平滑度差。
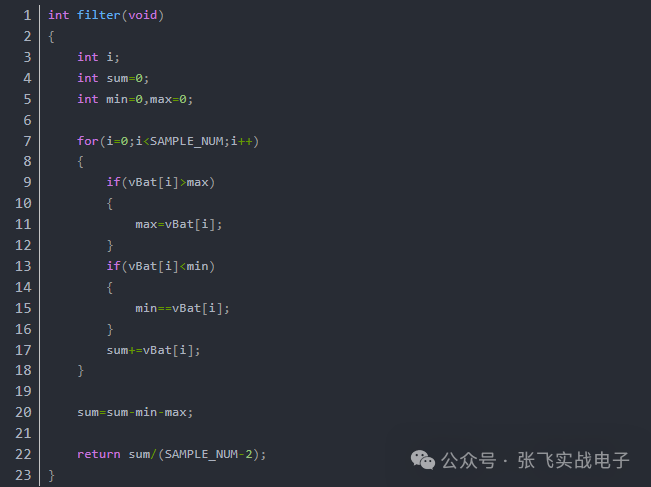
2. 算術(shù)平均濾波法
算術(shù)平均濾波,指的是將每個電感采集到的一組值用冒泡排序按從大到小順序排列,丟棄最大值和最小值,再對剩余的值求平均。
優(yōu)點:適用于對一般具有隨機干擾的信號進行濾波,信號會在某一數(shù)值范圍附近上下波動。
缺點:對于測量速度較慢或要求數(shù)據(jù)計算速度較快的實時控制不適用。
還有很多軟件濾波的方法,可以參考下面鏈接
c語言 算術(shù)平均濾波法_常見的濾波算法(C語言
PID控制
如果我們要想讓一個系統(tǒng)達到預期的值,那應該怎么樣做才能達到這個效果呢,這時候我們就可以引進PID。PID控制應該算是應用非常廣泛的控制算法了。小到控制一個元件的溫度,大到控制無人機的飛行姿態(tài)和飛行速度等等,都可以使用PID控制。
什么是PID控制
比例(P)積分(I)微分(D)控制(PID控制),是應用最廣泛的一種自動控制器。
原理簡單,易于實現(xiàn),適用面廣,參數(shù)獨立,在參數(shù)調(diào)試中也能輕易找到最適合該系統(tǒng)使用的參數(shù)。
PID控制分為兩種,在智能車控制中,最常用的就是增量式PID和位置式PID,舵機使用的是位置式PID,而電機的話,大多數(shù)的智能車隊使用的是增量式,其實電機并不局限于增量式,增量式和位置式在參數(shù)調(diào)好的情況下效果是一樣的,找到最適合自己的方案才是最重要的。
詳細的PID控制知識可以參考智能車淺談——控制規(guī)律篇
舵機控制
舵機的控制中,使用的是位置式PID,當車子處于賽道的不同位置時,偏差會不同。偏差等于左右電感值的偏差,當前偏差就是誤差,把當前誤差代入公式解算,最后輸出的值來控制舵機進行打角。

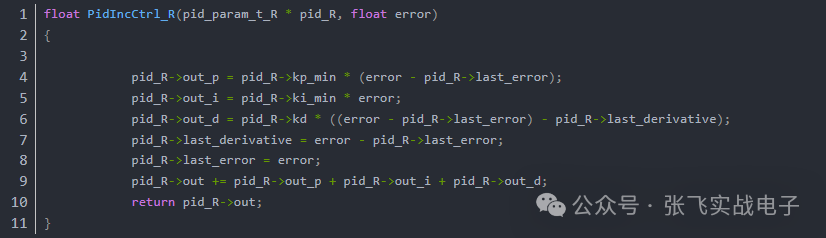
電機控制
電機的控制中,我使用的是增量式
根據(jù)編碼器采集回來的數(shù)據(jù)求出當前速度值,然后與設(shè)定速度比較,得出的差值作為誤差代入公式計算,得到最終需要輸出的電機占空比,從而控制電機轉(zhuǎn)速。
電機的閉環(huán)參數(shù)能很大程度上影響著智能車的上限,具體的調(diào)參步驟可以參考:
電機控制進階——PID速度控制
目標速度的設(shè)置
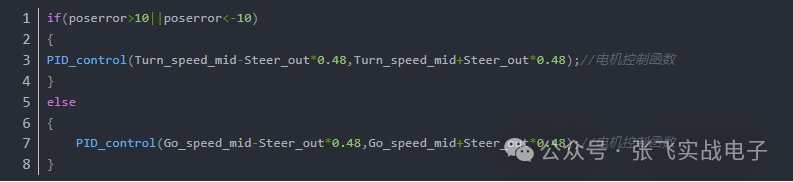
目標速度的設(shè)定在智能車系統(tǒng)中尤其重要,比如在賽車比賽中,由于在賽車自身機械性能的限制,不同賽道元素中速度上限也就不同。所以為了使賽車能夠更快的跑完全程,需要根據(jù)賽道元素的不同設(shè)置更合適當前路段的目標速度。
而對于電磁車來說,只能通過電磁傳感器去感知賽道,所以只能將左右電感的差值去關(guān)聯(lián)目標速度。差值小說明當前處于直道可以設(shè)定一個比較大的目標速度,通過PID算法將電機轉(zhuǎn)速保持在目標速度相近的速度,去讓智能車跑得更快,差值大的話,說明處于彎道處,這時候目標速度可以設(shè)定小一點,保證能順暢過彎。
對于有兩個電機的車模而言,轉(zhuǎn)向不僅僅可以通過舵機,還可以通過左右電機的差速輔助轉(zhuǎn)彎,這樣它的速度上限也能更高。
原文鏈接:https://blog.csdn.net/zxy19872029175/article/details/126766942
-
電機控制
+關(guān)注
關(guān)注
3572文章
1958瀏覽量
271882 -
電磁
+關(guān)注
關(guān)注
15文章
1158瀏覽量
52647 -
智能車
+關(guān)注
關(guān)注
21文章
409瀏覽量
77534 -
電磁組
+關(guān)注
關(guān)注
0文章
12瀏覽量
7933
發(fā)布評論請先 登錄
20.2-電磁桿在磁軌道的測試 零基礎(chǔ)入門智能車競賽 STM32電磁小車






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論