") 電磁智能車原理
電磁智能車原理
電磁智能車原理
我們可以看到很多的一些案例,比如電子競賽中已經(jīng)出現(xiàn)電磁智能車的設(shè)計案例,那么電磁智能車原理的是什么?
電磁智能車原理
電磁智能車是基于電磁導(dǎo)引的自主尋跡智能小車系統(tǒng),電磁智能車包括環(huán)境感知、規(guī)劃決策和運動控制三大部分,涵蓋了自動控制、模式識別、傳感技術(shù)、電子、計算機、機械、能源等多個學(xué)科知識。
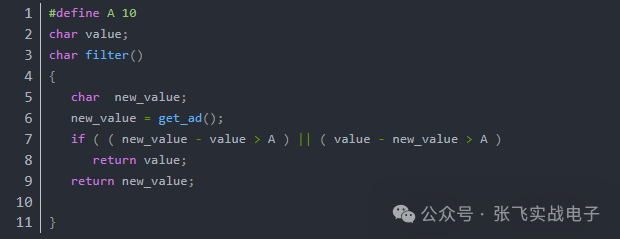
電磁智能車想要正常行駛在賽道上,必定是需要實時根據(jù)賽道的狀態(tài)來調(diào)整車身姿態(tài)的,那么電磁智能車是怎么樣獲取到賽道信息的?在賽道正中間會有一條磁感線,用來產(chǎn)生交變電磁信號。電磁智能車通過電感即可獲得到賽道信息。
導(dǎo)體切割磁感線會產(chǎn)生感應(yīng)電動勢,工字電感內(nèi)部的導(dǎo)線切割信號線產(chǎn)生的磁場,在電感引腳就會有感應(yīng)電動勢。電感距離磁場越近,產(chǎn)生的感應(yīng)電動勢越大,距離越遠,產(chǎn)生的感應(yīng)電動勢越小。當然在實際中會有各種不同的算法來應(yīng)對。
電磁智能車通過感應(yīng)賽道中心導(dǎo)線產(chǎn)生的交變磁場進行路徑檢測,要電磁智能車能夠通過傳感器信號自動識別當前所處位置以及距離賽道中心的位置。通過傳感器采集信號傳給單片機,通過編程實現(xiàn)電磁智能車位置的叛別以及控制小車采取相應(yīng)的動作,前進或者后退或者轉(zhuǎn)彎。
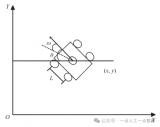
電感排布方案是制約電磁智能車競賽成績的關(guān)鍵因素之一,比如在全國大學(xué)生飛思卡爾杯智能汽車競賽中,有選手用到的電磁智能車方案是這樣的,根據(jù)畢奧 薩法爾定律和法拉第電磁感應(yīng)定律,在車模前上方水平排布的線圈,其檢測的感應(yīng)電動勢經(jīng)放大和檢波后,可得到一個直流信號E與水平距離x的關(guān)系,據(jù)此可解算出小車當前的位置偏差。然而采用單水平電感檢測只能反映位置偏差絕對值的大小,無法分辨偏離方向。為了彌補單電感無法分辨左右的問題,可采用雙水平線圈檢測方案,即在車模前上方高度為h的水平方向?qū)ΨQ排布兩個相距L的水平線圈;并對兩線圈的感應(yīng)電動勢作差值(簡稱差值法),據(jù)此可判斷小車的偏離方向和位置偏差。
此外AI賦能也已經(jīng)落地實現(xiàn),電磁智能車部署實施AI算法被更多提及和驗證。
而且在機器人智能化、裝備智能化、智能無人系統(tǒng)技術(shù)的升級普及下,電磁智能車正在被更多人關(guān)注。在《國家自然科學(xué)基金“十四五”發(fā)展規(guī)劃》中,就提出圍繞復(fù)雜結(jié)構(gòu)與介質(zhì)對電磁場和聲場的調(diào)控這一科學(xué)前沿與重大需求,重點研究具有特定時空序構(gòu)的電磁/聲超構(gòu)材料及超構(gòu)表面,電磁/聲人工體系中的單向操控,拓撲電磁/聲學(xué)體系,設(shè)計多功能、可重構(gòu)/調(diào)諧的新型電磁/聲人工器件,為發(fā)現(xiàn)電磁場、聲場調(diào)控新機理,實現(xiàn)新型光、聲器件的研制和應(yīng)用打下物理基礎(chǔ)。(綜合整理)
-
磁場
+關(guān)注
關(guān)注
3文章
901瀏覽量
24702 -
電感
+關(guān)注
關(guān)注
54文章
6194瀏覽量
103877 -
電磁
+關(guān)注
關(guān)注
15文章
1157瀏覽量
52553 -
智能小車
+關(guān)注
關(guān)注
87文章
554瀏覽量
82305 -
感應(yīng)電動勢
+關(guān)注
關(guān)注
0文章
139瀏覽量
5885
發(fā)布評論請先 登錄
智能座艙車規(guī)MCU主流之選 芯馳科技亮相香港車博會
華為乾崑智能車云服務(wù)通過CCRC IT產(chǎn)品信息安全認證
智能車淺談——手把手讓車跑起來(電磁篇)

華為與博泰車聯(lián)網(wǎng)達成合作意向
華為與7家伙伴達成智能車控模組合作意向
芯馳科技升級智能座艙與智能車控芯片產(chǎn)品線
呱呱三人談 | 快 or 準?競賽車手激辯智能車黑科技!
面向教學(xué)科研的智能車設(shè)計及實踐實驗室

智能車路協(xié)同試驗車開發(fā)服務(wù)

復(fù)雜環(huán)境下多無人智能車輛協(xié)同調(diào)控
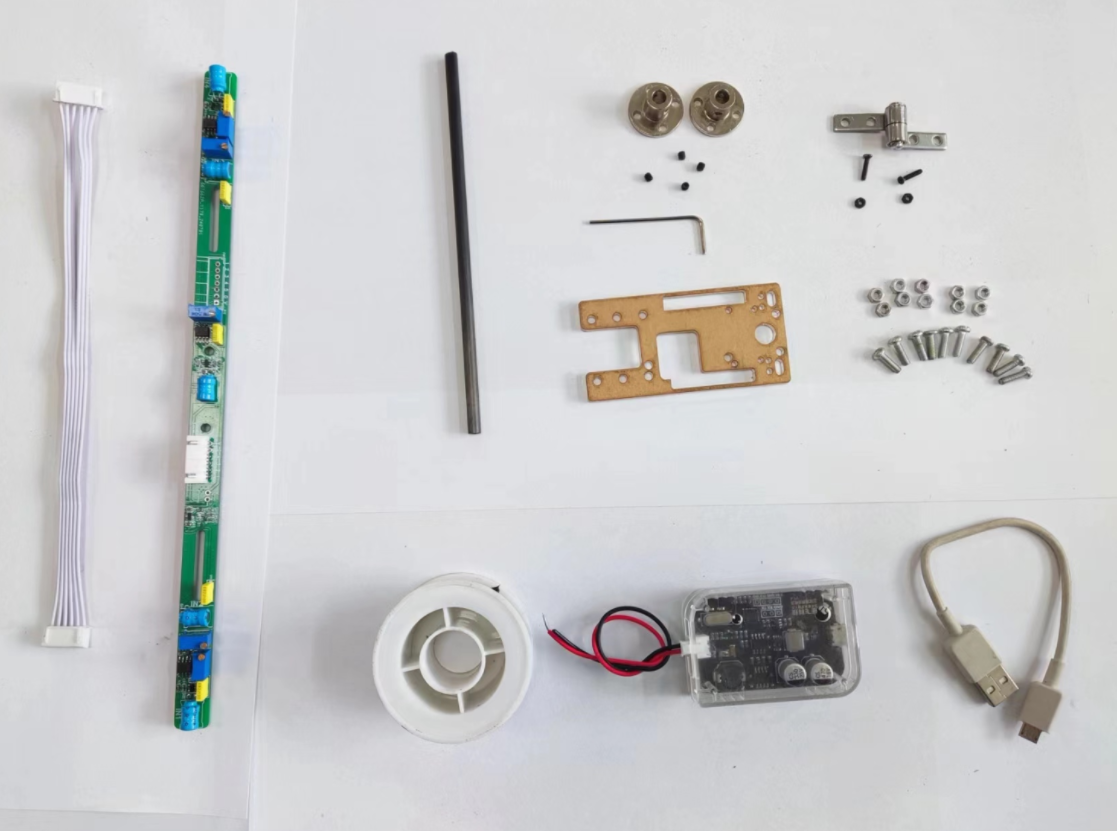
20.0-電磁桿的組裝和實物介紹“這個是就是你想要的“-智能車電磁組 電磁循跡小車
20.3-使用兩個通道進行電磁循跡 智能車競賽 電磁桿原理圖 電磁循跡小車 STM32電磁小車 電磁循跡算法

20.2-電磁桿在磁軌道的測試 零基礎(chǔ)入門智能車競賽 STM32電磁小車






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論