") 機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在背靠背點(diǎn)膠焊錫機(jī)上的應(yīng)用
機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在背靠背點(diǎn)膠焊錫機(jī)上的應(yīng)用

市場(chǎng)應(yīng)用背景
點(diǎn)膠與焊錫作為制造業(yè)自動(dòng)化關(guān)鍵環(huán)節(jié),專注服務(wù)電子、半導(dǎo)體、汽車及醫(yī)療等領(lǐng)域的高精密工藝需求。精密高速點(diǎn)膠焊錫解決方案通過(guò)實(shí)現(xiàn)高精高效的流體控制與焊接操作,助力企業(yè)實(shí)現(xiàn)生產(chǎn)效率與產(chǎn)品品質(zhì)的雙重提升。

▲ 待加工的PCB板 ▲
點(diǎn)膠焊錫設(shè)備介紹:
點(diǎn)膠機(jī)通過(guò)程序化控制點(diǎn)膠軌跡,實(shí)現(xiàn)對(duì)流體的精確控制,在加速作業(yè)的同時(shí)優(yōu)化工作環(huán)境并減少人工干預(yù)。
自動(dòng)焊錫機(jī)通過(guò)控制系統(tǒng)精準(zhǔn)調(diào)控加熱系統(tǒng),對(duì)烙鐵頭實(shí)施加熱,同時(shí)驅(qū)動(dòng)運(yùn)動(dòng)軸將產(chǎn)品精確定位至目標(biāo)位置。通過(guò)將固態(tài)的錫絲進(jìn)行融化從而使得其變成熔化狀態(tài),涂敷在待連接的零部件焊盤上。
點(diǎn)膠焊錫一體機(jī)是集成點(diǎn)膠與焊錫功能的自動(dòng)化設(shè)備,專為電子制造業(yè)設(shè)計(jì),能有效提升生產(chǎn)效率和焊接品質(zhì)。
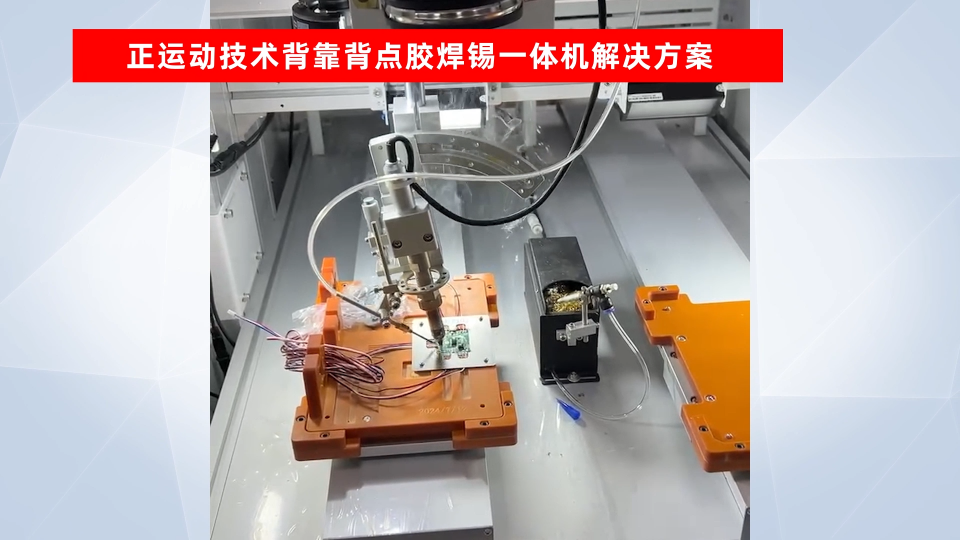
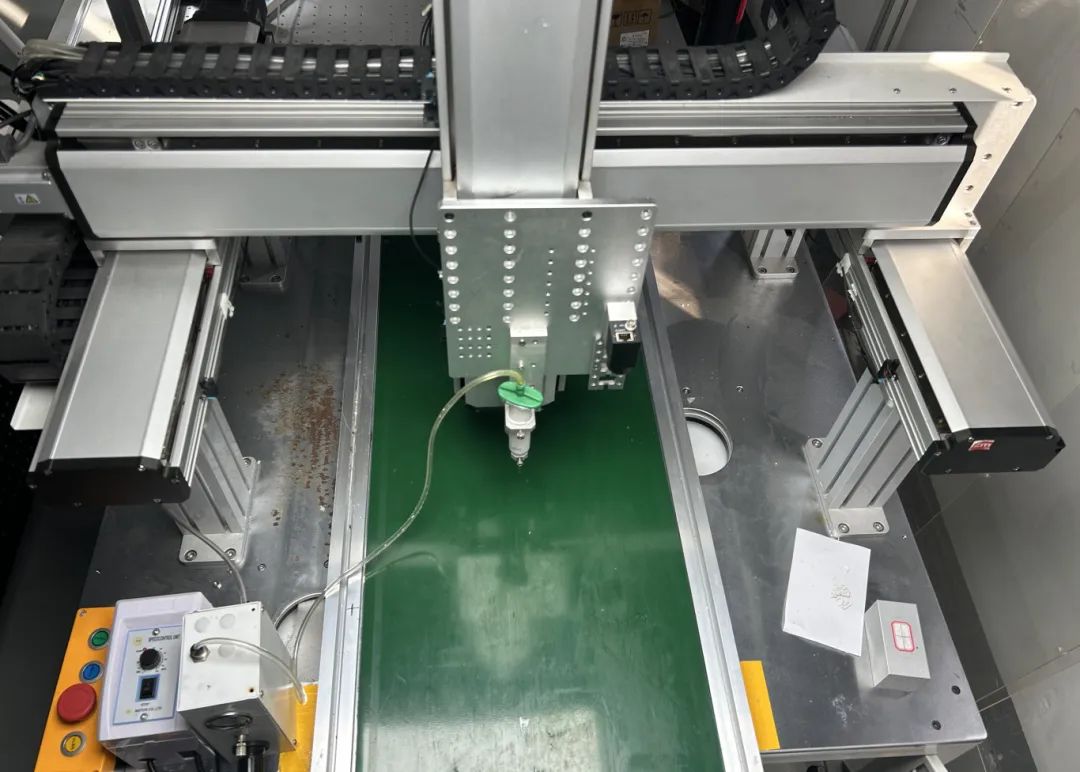
正運(yùn)動(dòng)技術(shù)背靠背點(diǎn)膠焊錫機(jī)方案:
正運(yùn)動(dòng)技術(shù)推出的背靠背點(diǎn)膠焊錫機(jī)方案,在市面上常見的傳統(tǒng)方案上新增了許多新功能,大大提高了設(shè)備的生產(chǎn)效率和產(chǎn)品的適應(yīng)能力;增強(qiáng)設(shè)備的容錯(cuò)能力,設(shè)置檢測(cè)功能,可預(yù)防和識(shí)別錯(cuò)焊、漏焊等問(wèn)題。

01 機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在背靠背點(diǎn)膠焊錫機(jī)上的應(yīng)用
背靠背點(diǎn)膠焊錫機(jī)運(yùn)行視頻可點(diǎn)擊→“機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在背靠背點(diǎn)膠焊錫機(jī)上的應(yīng)用_嗶哩嗶哩_bilibili”查看。
正運(yùn)動(dòng)背靠背點(diǎn)膠焊錫機(jī)解決方案設(shè)計(jì)
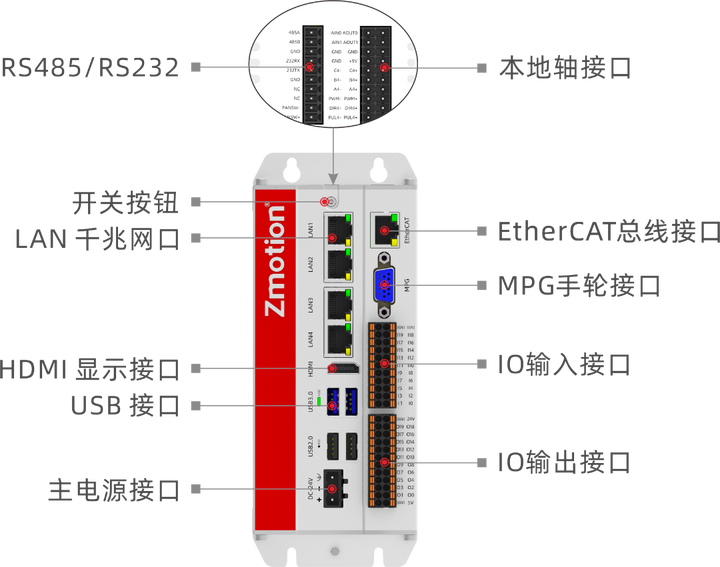
20DI:接原點(diǎn)、限位等傳感器,以及開關(guān)信號(hào)等;
20DO:高速輸出口接工業(yè)相機(jī)的硬觸發(fā)輸入、焊槍頭、夾緊氣缸控制;
4路本地單端脈沖輸出:接脈沖驅(qū)動(dòng)器,控制軸運(yùn)動(dòng);
EtherNET接口:千兆網(wǎng)口,接支持Gige協(xié)議的面陣相機(jī),實(shí)現(xiàn)視覺(jué)定位的應(yīng)用;
EtherCAT接口:接EtherCAT總線伺服驅(qū)動(dòng)器,控制軸運(yùn)動(dòng)。
機(jī)器視覺(jué)與運(yùn)動(dòng)控制工藝實(shí)現(xiàn)
| 機(jī)械視覺(jué)
主要使用了模板匹配功能,視覺(jué)對(duì)加工產(chǎn)品進(jìn)行識(shí)別,通過(guò)預(yù)先設(shè)定好的特征,如形狀、尺寸、Mark點(diǎn),最后獲取待加工產(chǎn)品的位置坐標(biāo),便于產(chǎn)品到達(dá)加工區(qū)域后,點(diǎn)膠頭進(jìn)行逐個(gè)產(chǎn)品的加工作業(yè)。
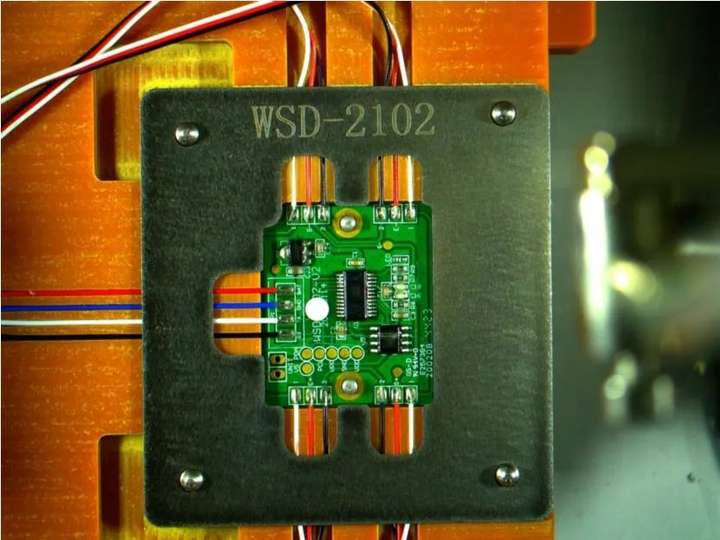
▲ 加工產(chǎn)品 ▲
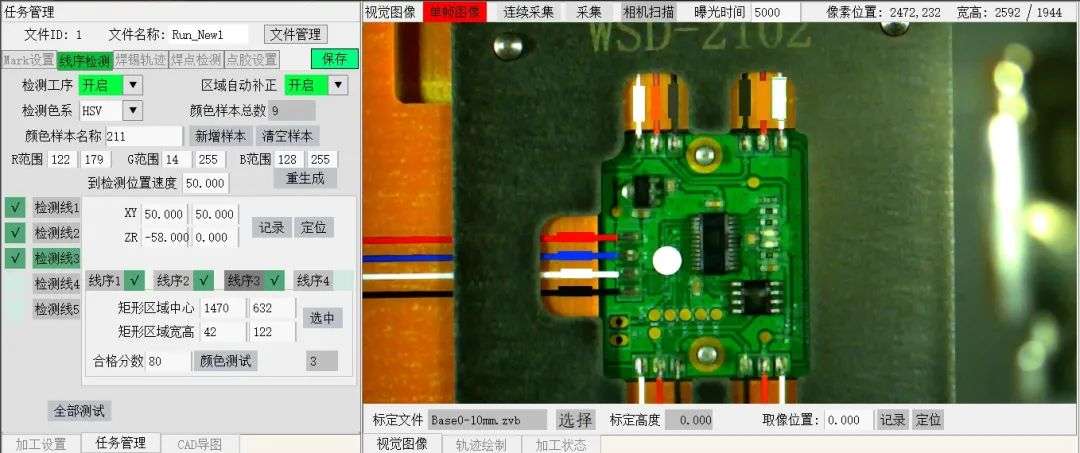
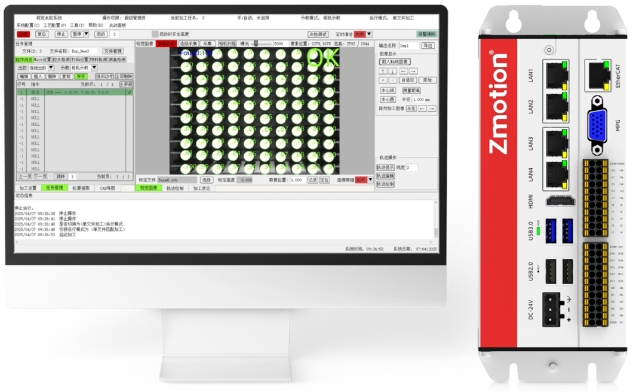
▲ 機(jī)器視覺(jué)處理界面 ▲
| 運(yùn)動(dòng)控制
在PCB板點(diǎn)膠及焊錫設(shè)備中,運(yùn)動(dòng)控制配置是實(shí)現(xiàn)精確加工的核心模塊。典型界面和功能包括:
● 視覺(jué)定位 通過(guò)工業(yè)相機(jī)采集PCB板產(chǎn)品圖像,結(jié)合CCD視覺(jué)定位與同軸光源進(jìn)行圖像處理與特征提取,確保點(diǎn)膠/焊槍頭精準(zhǔn)定位目標(biāo)位置,提升定位可靠性和重復(fù)精度。
● 焊錫加工 精確控制焊錫頭的運(yùn)動(dòng)軌跡,可設(shè)定起止坐標(biāo)、焊接速度、預(yù)加熱以及后加熱時(shí)間等參數(shù)。支持拖焊模式,沿預(yù)設(shè)路徑焊接。
● 點(diǎn)膠加工 提供圖形化編程界面設(shè)置點(diǎn)膠路徑、速度及出膠量參數(shù),支持連續(xù)/斷續(xù)等點(diǎn)膠模式。可自定義點(diǎn)膠順序和模式,并且支持調(diào)整點(diǎn)膠工藝參數(shù)。
● 回歸待機(jī)位 任務(wù)完成后機(jī)械手臂返回預(yù)設(shè)待機(jī)位,采用內(nèi)置運(yùn)動(dòng)算法確保平穩(wěn)移動(dòng),避免機(jī)械碰撞。待機(jī)位設(shè)置于安全區(qū)域便于設(shè)備維護(hù)和物料更換。
● 輔助功能配置
集成手動(dòng)調(diào)試、I/O檢測(cè)及工藝參數(shù)設(shè)置功能,支持氣缸測(cè)試、限位調(diào)整、當(dāng)量校準(zhǔn)等設(shè)備調(diào)試需求,滿足多樣化生產(chǎn)場(chǎng)景適配要求。
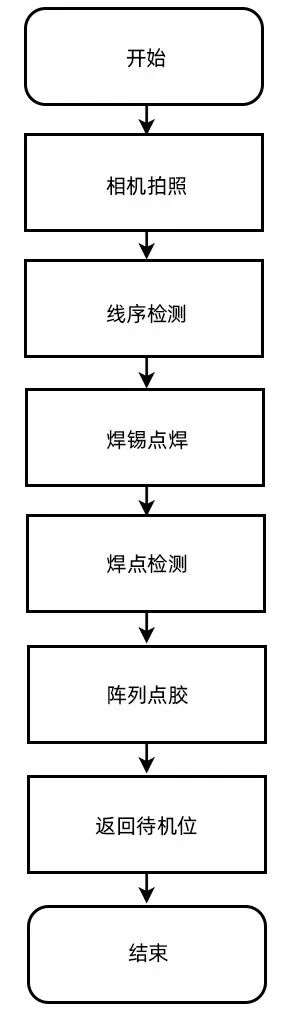
背靠背點(diǎn)膠焊錫機(jī)工藝流程
方案應(yīng)用優(yōu)勢(shì)
視覺(jué)定位系統(tǒng):集成高精度機(jī)器視覺(jué),實(shí)現(xiàn)自動(dòng)坐標(biāo)校正與路徑規(guī)劃,確保點(diǎn)膠/焊接工藝的高精度與作業(yè)效能。
任意位置定位:通過(guò)高精度圖像處理技術(shù),系統(tǒng)可自動(dòng)識(shí)別PCB板上元件的自由排布位置,無(wú)需依賴固定夾具即可完成精準(zhǔn)點(diǎn)膠焊接。這種自適應(yīng)能力顯著提升生產(chǎn)柔性化水平。
線序智能檢測(cè):基于機(jī)器視覺(jué)技術(shù),系統(tǒng)可檢測(cè)焊接過(guò)程的線序,有效防止錯(cuò)焊、漏焊等工藝異常,確保焊接流程的規(guī)范性。
焊點(diǎn)質(zhì)量分析:采用圖像分析算法對(duì)焊點(diǎn)形態(tài)和質(zhì)量進(jìn)行檢測(cè),精準(zhǔn)識(shí)別虛焊、焊料缺失、裂紋等缺陷,為工藝參數(shù)優(yōu)化提供數(shù)據(jù)支持。
焊錫搭配點(diǎn)膠復(fù)合加工:點(diǎn)膠操作與焊錫加工相結(jié)合,這種一體化的加工方式提高了生產(chǎn)效率,減少了人工操作,提升了產(chǎn)品的可靠性和質(zhì)量。
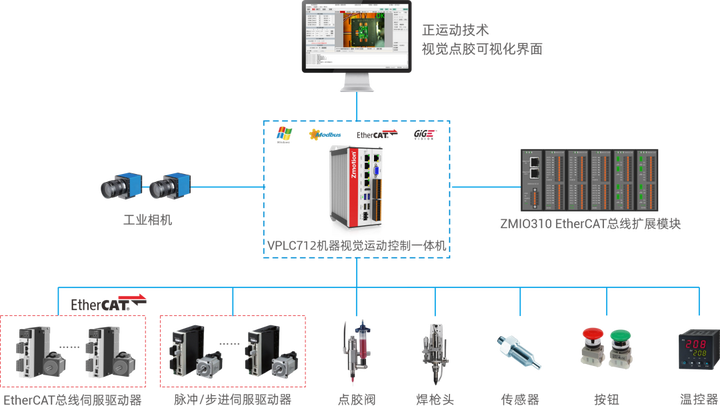
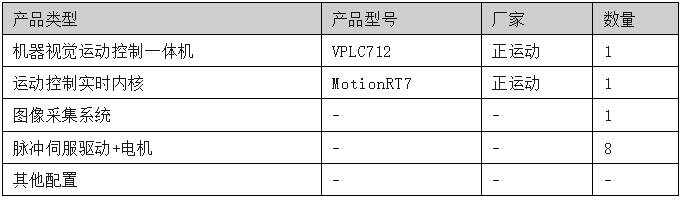
解決方案硬件配置
02 高集成機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)VPLC712

正運(yùn)動(dòng)技術(shù)VPLC712機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)是一款基于x86架構(gòu)的EtherCAT總線視覺(jué)運(yùn)動(dòng)控制器,采用一體化設(shè)計(jì),將實(shí)時(shí)機(jī)器視覺(jué)、運(yùn)動(dòng)控制、IO和監(jiān)控集成于一臺(tái)多核控制器上,實(shí)現(xiàn)多任務(wù)并行實(shí)時(shí)處理自動(dòng)化設(shè)備任務(wù),通過(guò)共享內(nèi)存機(jī)制,將PC部分硬件資源通過(guò)MotionRT7進(jìn)行配置,實(shí)現(xiàn)核內(nèi)高速交互,驅(qū)動(dòng)執(zhí)行器進(jìn)行對(duì)應(yīng)操作,完成設(shè)備整體的控制。
VPLC系列機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)的安裝與拆卸過(guò)程便捷,占地空間小,還能與其它控制單元部件(如伺服驅(qū)動(dòng)器、傳感器、編碼器、控制閥等)無(wú)縫集成,提供一個(gè)完整端到端的視覺(jué)運(yùn)動(dòng)控制解決方案。
VPLC712機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī),本身最多支持64軸,EtherCAT最小通訊周期可達(dá)到250us;板載20數(shù)字輸入,20數(shù)字輸出以及4路高速鎖存輸入;板載2路本地差分脈沖軸、2路AD和2路DA。
03 提供易用的可視化視覺(jué)點(diǎn)膠開發(fā)調(diào)試軟件

正運(yùn)動(dòng)技術(shù)通過(guò)不斷深化擴(kuò)展VPLC系列視覺(jué)運(yùn)動(dòng)控制一體機(jī)在點(diǎn)膠行業(yè)的應(yīng)用,為用戶提供了簡(jiǎn)單易用的視覺(jué)點(diǎn)膠開發(fā)調(diào)試軟件。
軟件結(jié)合豐富的視覺(jué)、運(yùn)動(dòng)控制功能,只需進(jìn)行簡(jiǎn)單的參數(shù)設(shè)置,即可快速搭建視覺(jué)點(diǎn)膠項(xiàng)目程序,可大幅縮短項(xiàng)目開發(fā)周期,降低開發(fā)成本,可滿足不同產(chǎn)品不同點(diǎn)膠工藝需求。
適用于粘接、噴射、密封、灌注、底部填充、滴膠、線/弧/圓點(diǎn)膠等多種點(diǎn)膠應(yīng)用場(chǎng)景。
▌功能齊全
支持點(diǎn)膠軌跡打點(diǎn)、線、圓、弧、連續(xù)線段、陣列、提前開關(guān)膠、手動(dòng)示教、相機(jī)示教、點(diǎn)膠工藝功能。
▌機(jī)器視覺(jué)糾偏
產(chǎn)品任意位置和角度擺放,視覺(jué)自動(dòng)識(shí)別并完成點(diǎn)膠、噴膠等作業(yè)。
▌操作界面友好功能齊全
調(diào)試編程操作簡(jiǎn)單便捷,支持在視覺(jué)圖像上進(jìn)行示教和點(diǎn)動(dòng)運(yùn)動(dòng)。
正運(yùn)動(dòng)技術(shù)專注于運(yùn)動(dòng)控制技術(shù)研究和通用運(yùn)動(dòng)控制軟硬件產(chǎn)品的研發(fā),是國(guó)家級(jí)高新技術(shù)企業(yè)。正運(yùn)動(dòng)技術(shù)匯集了來(lái)自華為、中興等公司的優(yōu)秀人才,在堅(jiān)持自主創(chuàng)新的同時(shí),積極聯(lián)合各大高校協(xié)同運(yùn)動(dòng)控制基礎(chǔ)技術(shù)的研究,是國(guó)內(nèi)工控領(lǐng)域發(fā)展最快的企業(yè)之一,也是國(guó)內(nèi)少有、完整掌握運(yùn)動(dòng)控制核心技術(shù)和實(shí)時(shí)工控軟件平臺(tái)技術(shù)的企業(yè)。主要業(yè)務(wù)有:運(yùn)動(dòng)控制卡_運(yùn)動(dòng)控制器_EtherCAT運(yùn)動(dòng)控制卡_EtherCAT控制器_運(yùn)動(dòng)控制系統(tǒng)_視覺(jué)控制器__運(yùn)動(dòng)控制PLC_運(yùn)動(dòng)控制_機(jī)器人控制器_視覺(jué)定位_XPCIe/XPCI系列運(yùn)動(dòng)控制卡等。
審核編輯 黃宇
-
機(jī)器視覺(jué)
+關(guān)注
關(guān)注
163文章
4517瀏覽量
122356 -
一體機(jī)
+關(guān)注
關(guān)注
0文章
1116瀏覽量
33281 -
運(yùn)動(dòng)控制
+關(guān)注
關(guān)注
4文章
641瀏覽量
33400
發(fā)布評(píng)論請(qǐng)先 登錄
機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在背靠背點(diǎn)膠焊錫機(jī)上的應(yīng)用#正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制器 #運(yùn)動(dòng)控制系統(tǒng)方案 #正運(yùn)動(dòng)
機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在視覺(jué)點(diǎn)膠滴藥機(jī)上的應(yīng)用

機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在視覺(jué)點(diǎn)膠滴藥機(jī)上的應(yīng)用#正運(yùn)動(dòng)技術(shù) #機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī) #運(yùn)動(dòng)控制
機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在龍門跟隨點(diǎn)膠的解決方案
是否可以將兩個(gè)PTN3222GMJ設(shè)備背靠背連接以制作USB2中繼器?
機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在LED燈噴膠解決方案
工業(yè)一體機(jī)在工業(yè)視覺(jué)設(shè)備中的應(yīng)用
高集成機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)VPLC712!

機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在PCB跟隨點(diǎn)膠上的應(yīng)用
兩個(gè)MOS管背靠背串聯(lián)就會(huì)組成雙向開關(guān)?
機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在DELTA并聯(lián)機(jī)械手視覺(jué)上下料應(yīng)用

聚徽-工控一體機(jī)有什么創(chuàng)新
機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)VPLC532E在汽車膠帶纏繞的開放式CNC應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論