 【電機】了解無刷直流電機BLDC
【電機】了解無刷直流電機BLDC
1 介紹
無刷直流電機(Brushless Direct Current Motor,簡稱BLDCM)由電動機主體和驅動器組成,是一種典型的機電一體化產品。無刷電機是指無電刷和換向器(或集電環)的電機,又稱無換向器電機。這是模型中除了有刷電機以外用的最多的一種電機,無刷直流電機不使用機械的電刷裝置,采用方波自控式永磁同步電機,與有刷電機相比,它將轉子和定子交換,即無刷電機中使用電樞繞組作為定子,使用釹鐵硼的永磁材料作為轉子,以霍爾傳感器取代碳刷換向器,性能上相較一般的傳統直流電機有很大優勢。具有高效率、低能耗、低噪音、超長壽命、高可靠性、可伺服控制、無級變頻調速等優點,而缺點則是比有刷的貴、不好維護,廣泛應用于航模、高速車模和船模。
不過,單個的無刷電機不是一套完整的動力系統,無刷電機基本必須通過無刷控制器才能實現連續不斷的運轉。普通的碳刷電機旋轉的是繞組,而無刷電機不論是外轉子結構還是內轉子結構旋轉的都是磁鐵。
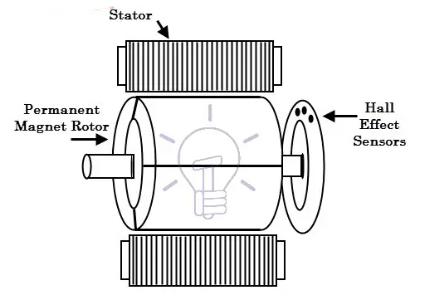
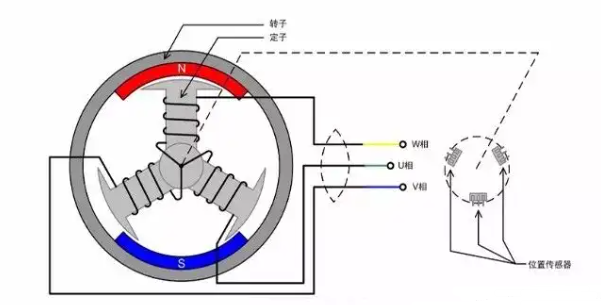
無刷電機的定子是產生旋轉磁場的部分,能夠支撐轉子進行旋轉,主要由硅鋼片、漆包線、軸承、支撐件構成;而轉子則是黏貼了釹鐵硼磁鐵、在定子旋轉磁場的作用進行旋轉的部件,主要由轉軸、磁鐵、支持件構成。除此之外,定子與轉子組成的磁極對數還影響著電機的轉速與扭力。
2 重要參數
2.1 額定電壓
無刷電機適合的工作電壓,其實無刷電機適合的工作電壓非常廣,額定電壓是指定了負載條件而得出的情況。例如說,2212-850KV 電機指定了1045 螺旋槳的負載,其額定工作電壓就是11V。如果減小負載,例如帶7040 螺旋槳,那這個電機完全可以工作在22V 電壓下。但是這個工作電壓也不是無限上升的,主要受制于電子控制器支持的最高頻率。所以說,額定工作是由工作環境決定的。
2.2 KV值
有刷直流電機是根據額定工作電壓來標注額定轉速的,無刷電機引入了KV 值的概念,而讓用戶可以直觀的知道無刷電機在具體的工作電壓下的具體轉速。實際轉速=KV 值 × 工作電壓,這就是KV 的物理意義,就是在1V 工作電壓下每分鐘的轉速。無刷直流電機的轉速與電壓呈正比關系,電機的轉速會隨著電壓上升而線性上升。例如,2212-850KV 電機在10V 電壓下的轉速就是:850 × 10=8500RPM(RPM,每分鐘轉速)。KV 值與匝數是呈反比例關系的,例如2212-850KV,匝數是30T(15 圈),那在28T 的情況下的KV 值是:850KV × 30T / 28T=910KV。
2.3 轉矩與轉速
轉矩:(力矩、扭矩)電機中轉子產生的可以用來帶動機械負載的驅動力矩,我們可以理解為電機的力量。
轉速: 電機每分鐘的轉速。
電機的轉矩和轉速在同一個電機內永遠是一個此消彼長的關系,基本可以認為轉矩和轉速的乘積是一個定數,即同一個電機的轉速越高,必定其轉矩越低,相反也依然。不可能要求個電機的轉速也更高,轉矩也更高,這個規律通用于所有電機。例如:2212-850KV 電機,在11V 的情況下可以帶動1045 槳,如果將電壓上升一倍,其轉速也提高一倍,如果此時負載仍然是1045 槳,那該電機將很快因為電流和溫度的急劇上升而燒毀。
2.4 最大電流和最大功率
最大電流: 電機能夠承受并安全工作的最大電流。
每個電機都有自己的力量上限,最大功率就是這個上限,如果工作情況超過了這個最大功率,就會導致電機高溫燒毀。
2.5 槽極結構(N:槽數,P:極數)
鐵芯極數(槽數)∶ 定子硅鋼片的槽數量。
磁鋼極數(極數)∶ 轉子上磁鋼的數量。
模型常見的內轉子無刷電機結構有: 3N2P(有感電機常用)、12N4P(大部分內轉子電機)模型常見的外轉子無刷電機結構有:9N6P、9N12P、12N8P、12N10P、12N14P、18N16P、24N20P。
模型用內轉子無刷電機極數不高的原因: 目前內轉子電機多用于減速使用,所以要求的轉速都比較高。電子轉速= 實際轉速 × 電機極對數,電子控制器支持的最高電子轉速往往都是一個定數,所以如果電機極對數太高的話,支持的最高電機轉速就會下降,所以目前的內轉子電機極數都是4 以內。
2.6 其他設計驅動需要的參數
定子電感:電動機靜止時的定子繞組兩端的電感。
定子電阻:在20℃ 下電動機每相繞組的直流電阻。
反電動勢系數:在規定條件下,電動機繞組開路時,單位轉速在電樞繞組中所產生的線感應電動勢值。
在學習工作原理前我們先來學習一下安培定則,安培定則,也叫右手螺旋定則,是表示電流和電流激發磁場的磁感線方向間關系的定則。通電直導線中的安培定則(安培定則一):用右手握住通電直導線,讓大拇指指向電流的方向,那么四指指向就是磁感線的環繞方向;通電螺線管中的安培定則(安培定則二):用右手握住通電螺線管,讓四指指向電流的方向,那么大拇指所指的那一端是通電螺線管的N 極,如下圖1所示。
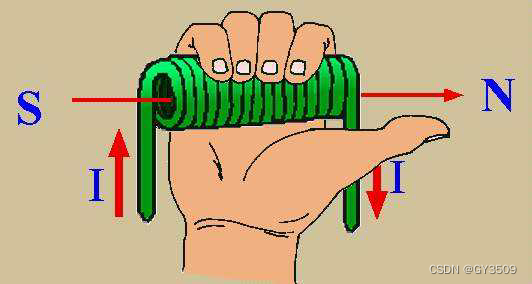
圖1
我們知道在磁極中同名相吸,異名相斥,及N 極與S 極相互吸引,N 極與N 極和S 極與S 極相互排斥,下面我們來看看一個直流模型,如下圖2所示。
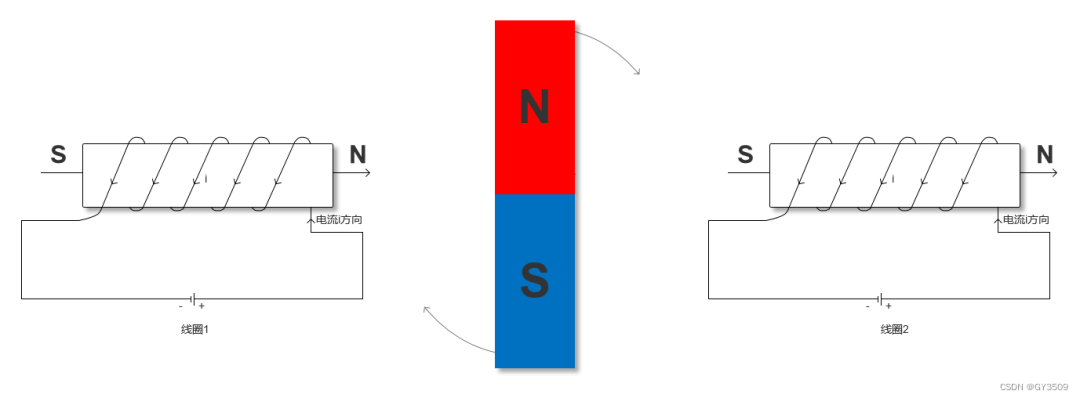
圖2
當兩邊的線圈通上電后,由右手螺旋定則可知兩個線圈中將會產生方向向右的磁場,而中間的轉子會盡量使自己內部的磁感線方向與外磁感線方向保持一致,以形成一個最短閉合磁力線回路,N 極與S 極相互吸引,這樣內轉子就會按順時針方向旋轉了。當轉子旋轉到如圖3所示的水平位置時轉子將不會受到作用力。
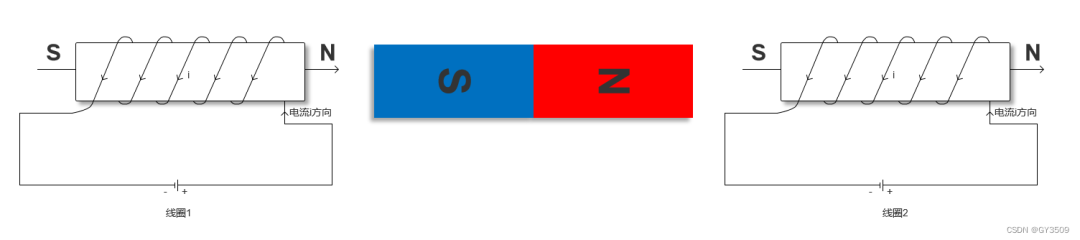
圖3
但是由于慣性的作用轉子將會繼續旋轉,當轉子旋轉至水平位置時,交換兩個線圈中的電流方向,這時轉子就會繼續向順時針方向轉動了。當轉子再次旋轉至水平位置時,再次交換兩個線圈中的電流方向,這樣轉子就可以一直旋轉了。
有了上面的基礎,我們再來看下面的“三相星形聯結的二二導通方式”。
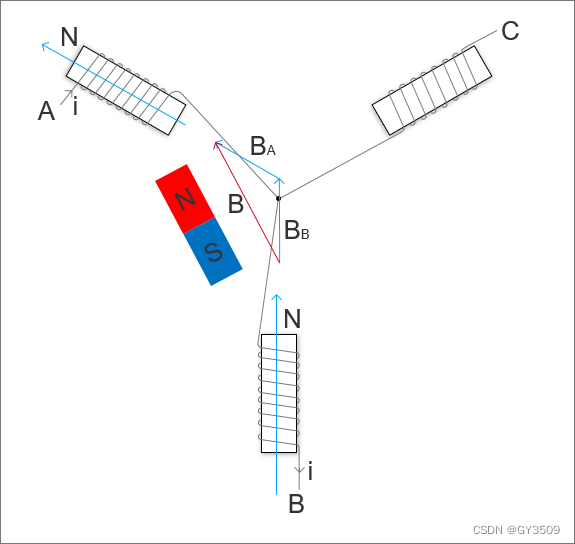
圖4
在A 端上電源正極,在B 端接電源負極,那么可以在線圈A 和B 中可以產生如圖所示的磁場,因為磁場強度是矢量,所以由磁場BB 和BA 可以得到合成磁場B。此時轉子就會保持在圖中方向。
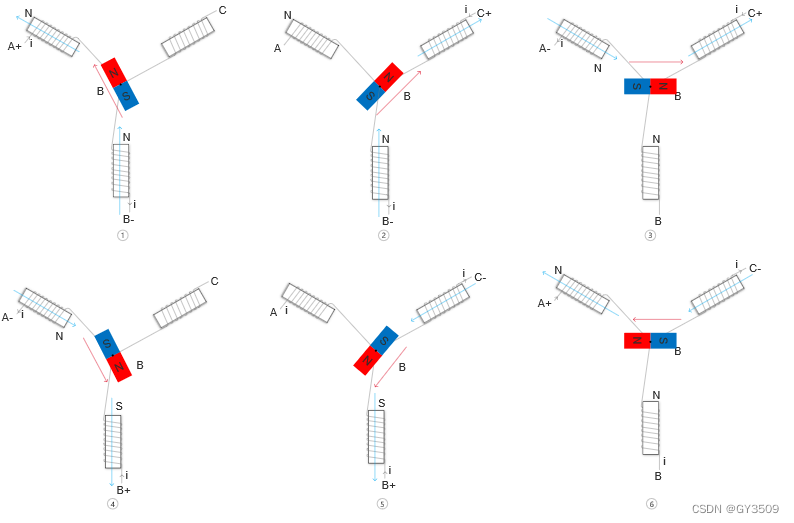
圖5
想要轉子轉動就需要接入不同的電壓,我們來分析一下圖中的6 個過程。
1. 在A 端接入正電壓,B 端接入負電壓,C 端懸空,轉子將會旋轉至圖中1 的位置。
2. 在1 的基礎上,C 端接入正電壓,B 端接入負電壓,A 端懸空,轉子將會從1 的位置旋轉至圖中2 的位置。
3. 在2 的基礎上,C 端接入正電壓,A 端接入負電壓,B 端懸空,轉子將會從2 的位置旋轉至圖中3 的位置。
4. 在3 的基礎上,B 端接入正電壓,A 端接入負電壓,C 端懸空,轉子將會從3 的位置旋轉至圖中4 的位置。
5. 在4 的基礎上,B 端接入正電壓,C 端接入負電壓,A 端懸空,轉子將會從4 的位置旋轉至圖中5 的位置。
6. 在5 的基礎上,A 端接入正電壓,C 端接入負電壓,B 端懸空,轉子將會從5 的位置旋轉至圖中6 的位置。
當轉子旋轉到位置6 時,在重復1 的供電狀態,轉子將會從6 的位置旋轉到1 的位置。在經過上面的6 個過程后轉子正好轉了一圈,我們將這種驅動方法稱為6 拍工作方式,每次電壓的變化稱為換相。想要電機持續的旋轉我們只要按上面轉子相應的位置接入相應的電壓即可。
-
電壓
+關注
關注
45文章
5698瀏覽量
117301 -
BLDC
+關注
關注
213文章
826瀏覽量
98000 -
無刷直流電機
+關注
關注
61文章
699瀏覽量
47235
發布評論請先 登錄

bldc無刷電機換相原理 bldc無刷直流電機和變頻電機的區別
什么是無刷直流電機(BLDC)?無刷直流電機的優勢有哪些?





 工商網監
工商網監
評論