 RV1126系列Viztra-LE044圖像處理板 無人機反制專用AI模塊
RV1126系列Viztra-LE044圖像處理板 無人機反制專用AI模塊

無人機應用范圍的不斷增加,讓其帶來的安全隱患也不斷增多。軍事方面,俄烏沖突就是一個很好的例子,你的無人機能打別人,別人也能打你。而民用方面,類似天津無人機黑飛這樣的事件不得不防,給航空安全、國防安全造成威脅。
因此,無人機反制措施必不可少,如激光反無、電子干擾、物理沖擊等。但這些方式,也都是打擊模式的區別,在如何發現無人機上都大差不差。
不同的打擊模式,受成本、環境等影響各有優劣。這之中,無人機物理沖擊作為一種比較傳統的方式,兼具經濟實惠、打擊距離遠、自動化等優點,使得其在無人機反制領域有著一席之地。
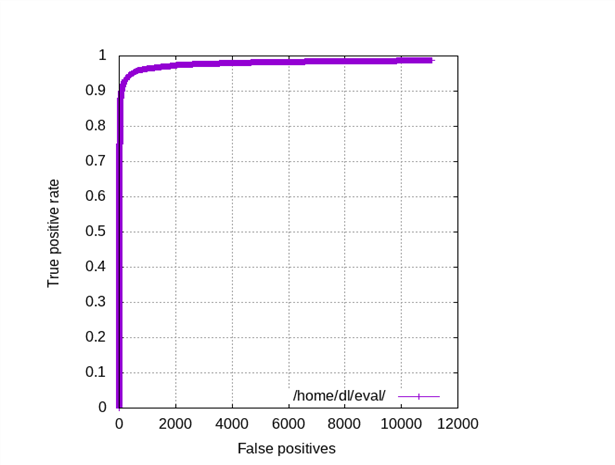
由于無人機飛得高,肉眼可見甚至為一個小點,一般的算法就很難派上用場。慧視光電的算法工程師針對這一難題,通過增加小目標的訓練樣本數量,放大圖像或特征使小目標變為大目標,增加小目標的正樣本數量。推出了針對小型飛行物的質心小目標識別算法,經過不斷的測試驗證,算法已經在RV1126、RK3588等系列圖像處理板上有著穩定的表現。
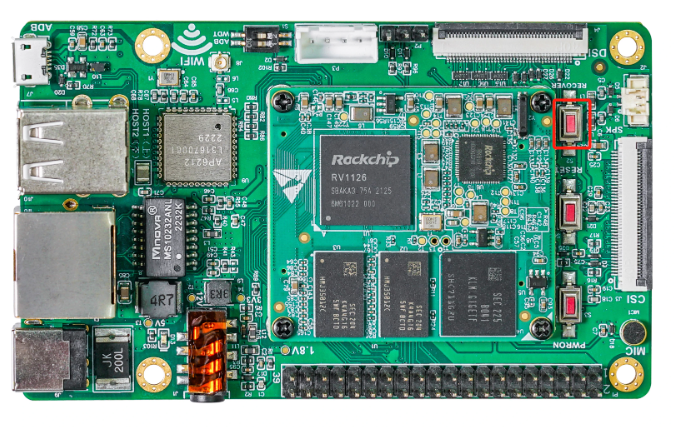
具備識別能力后,就需要派出本方無人機對敵對無人機進行鎖定打擊。在無人機上加裝慧視RV1126系列的Viztra-LE044圖像處理板,通過算法加持實現對敵方無人機的識別鎖定,然后無人機自動起飛,沖擊目標無人機,實現反制。
這樣的方法雖然簡單,但卻很實用,并且RV1126圖像處理板的造價和FPV的造價都能得到有效控制,這樣的反制措施既經濟又高效。
Viztra-LE044圖像處理板參數

性能指標 | |
跟蹤幀率 | 30 Hz(隨相機輸入幀率,最高可支持到50Hz) |
最小跟蹤目標 | 4×4 像素(質心跟蹤);10×10 像素(相關跟蹤) |
跟蹤精度 | ≤ 1 像素 |
跟蹤速度 | ≥ 32 像素/幀 |
最小目標對比度(質心目標) | ≥ 5% |
最大跟蹤目標數量(多目標跟蹤) | ≤ 32 |
識別幀率 | 25 Hz |
最小識別目標 | 20×20 像素 |
功能參數 | |
支持的跟蹤算法 | 質心跟蹤、相關跟蹤、多目標跟蹤 |
支持的檢測算法 | AI識別、質心搜索 |
圖像壓縮編碼格式 | H.264、H.265 |
視頻流輸出格式 | RTSP、UDP、RTMP、HLS等 |
視頻流可配置參數 | 碼率、I幀間隔、QP值 |
控制交互方式 | |
環境適應性 | |
工作溫度 | -40℃ ~ +65℃ |
存儲溫度 | -55℃ ~ +75℃ |
-
AI
+關注
關注
88文章
35008瀏覽量
278757 -
無人機
+關注
關注
231文章
10824瀏覽量
186563 -
處理板
+關注
關注
0文章
19瀏覽量
5868
發布評論請先 登錄
基于RV1126開發板實現人臉檢測方案

基于RV1126開發板實現人臉檢測方案
基于RV1126開發板實現人臉檢測方案
基于RV1126開發板的resnet50訓練部署教程

RV1126核心特性概述
國產化圖像處理板 RV1126和RK3588該怎么選?

【客戶實例】慧視定制化RV1126圖像處理板跟蹤效果對比
無人機吊艙新選擇 慧視Viztra-LE026圖像跟蹤板 小巧輕便還省電!





 工商網監
工商網監
評論