") 康謀加入ASAM組織,自動駕駛仿真平臺aiSim引領(lǐng)安全新標(biāo)桿
康謀加入ASAM組織,自動駕駛仿真平臺aiSim引領(lǐng)安全新標(biāo)桿

康謀新聞
康謀科技正式加入全球汽車標(biāo)準(zhǔn)化組織 ASAM(Association for Standardization of Automation and Measuring Systems),成為其正式會員單位!
ASAM作為國際汽車行業(yè)標(biāo)準(zhǔn)化領(lǐng)域的權(quán)威機構(gòu),致力于推動仿真、測試及數(shù)據(jù)交互的標(biāo)準(zhǔn)化進程。此次加入,標(biāo)志著康謀在自動駕駛仿真技術(shù)領(lǐng)域的創(chuàng)新實力與行業(yè)影響力獲得國際認(rèn)可,未來將深度參與全球標(biāo)準(zhǔn)制定,助力行業(yè)技術(shù)升級!
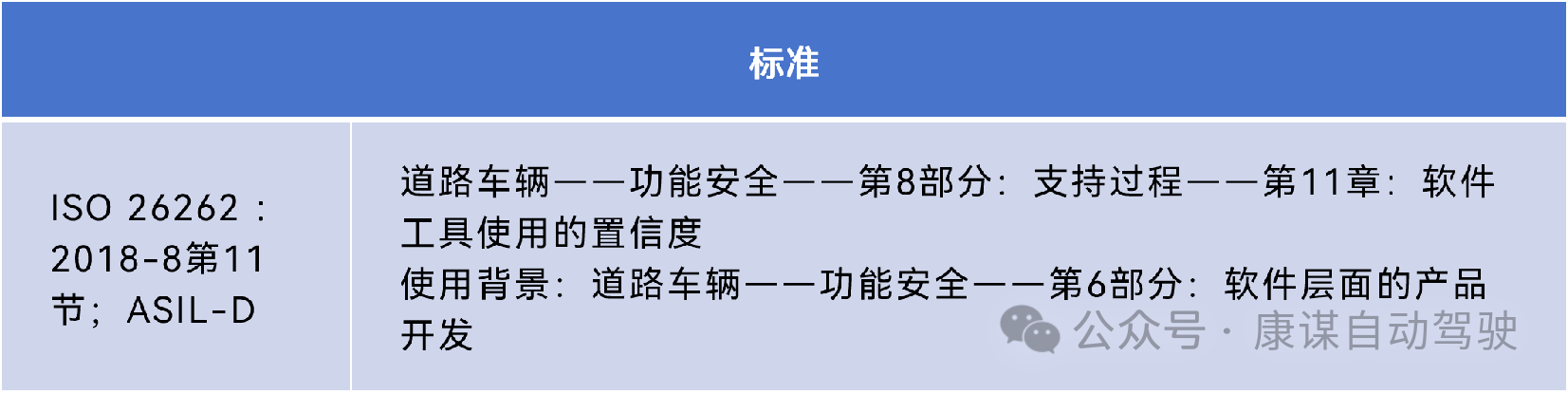
康謀獨家的aiSim自動駕駛仿真平臺,憑借卓越的安全性與可靠性,是全球首個通過ISO 26262 ASIL-D認(rèn)證的自動駕駛仿真軟件!
ASIL-D認(rèn)證的意義
ISO 26262 標(biāo)準(zhǔn)是汽車功能安全領(lǐng)域的國際權(quán)威標(biāo)準(zhǔn),其定義的ASIL(Automotive Safety Integrity Level)汽車安全完整性等級從 A 到 D,D 級代表著最高的安全要求。獲得 ASIL - D 認(rèn)證,意味著產(chǎn)品在安全機制設(shè)計、故障檢測與處理、系統(tǒng)架構(gòu)等多個方面都達到了極致的嚴(yán)謹(jǐn)與可靠。
aiSim最初于2020年獲得ASIL-D認(rèn)證,是全球首個獲得該認(rèn)證的自動駕駛仿真軟件,意味著其從設(shè)計、開發(fā)到驗證的全流程均符合國際最高安全標(biāo)準(zhǔn),為自動駕駛算法的研發(fā)與測試提供了零妥協(xié)的安全保障,引領(lǐng)著行業(yè)安全新標(biāo)桿。
aiSim的卓越安全特性
對于主機廠和自動駕駛技術(shù)開發(fā)商而言,aiSim能在虛擬環(huán)境中開展全方位高可靠測試,模擬復(fù)雜交通、極端天氣與故障工況,提前排查安全隱患,優(yōu)化算法與控制策略,降低實車測試風(fēng)險和成本,加速產(chǎn)品研發(fā)。
經(jīng)其高可靠仿真測試,自動駕駛系統(tǒng)在上市前得以充分驗證優(yōu)化,無論是城市復(fù)雜路況還是高速行駛場景,都能確保運行安全穩(wěn)定,為用戶提供可靠保障。
誠邀主機廠測試
面對日益復(fù)雜的自動駕駛測試需求,測試場景置信度驗證至關(guān)重要。康謀aiSim作為全球首個通過ASIL-D認(rèn)證的自動駕駛仿真軟件,可為主機廠提供可信賴的測試與驗證。
康謀誠摯邀請各大主機廠使用aiSim軟件進行測試場景置信度驗證。借助aiSim的強大功能,您將能夠:
精準(zhǔn)構(gòu)建高置信度測試場景
利用aiSim豐富的場景庫和靈活的場景編輯工具,結(jié)合真實世界數(shù)據(jù)和先進的 AI 算法,構(gòu)建高度逼真的測試場景,確保測試結(jié)果能夠真實反映自動駕駛系統(tǒng)在實際道路中的性能表現(xiàn)。
深度驗證場景覆蓋度
通過aiSim的智能分析功能,對測試場景的覆蓋度進行全面評估,查找潛在的場景漏洞,確保自動駕駛系統(tǒng)在各種可能的情況下都能得到充分測試,提升系統(tǒng)的安全性和可靠性。
高效優(yōu)化測試流程
aiSim的自動化測試功能和快速迭代特性,能夠幫助主機廠大幅提高測試效率,縮短測試周期,降低測試成本。同時,通過與現(xiàn)有開發(fā)工具鏈的無縫集成,實現(xiàn)測試流程的數(shù)字化和智能化管理。
審核編輯 黃宇
-
仿真
+關(guān)注
關(guān)注
52文章
4268瀏覽量
135704 -
自動駕駛
+關(guān)注
關(guān)注
788文章
14302瀏覽量
170470
發(fā)布評論請先 登錄
康謀分享 | 物理級傳感器仿真:破解自動駕駛長尾場景驗證難題

康謀分享 | 基于多傳感器數(shù)據(jù)的自動駕駛仿真確定性驗證

康謀分享 | 自動駕駛仿真進入“標(biāo)準(zhǔn)時代”:aiSim全面對接ASAM OpenX

新能源車軟件單元測試深度解析:自動駕駛系統(tǒng)視角
技術(shù)分享 |多模態(tài)自動駕駛混合渲染HRMAD:將NeRF和3DGS進行感知驗證和端到端AD測試

康謀分享 | 3DGS:革新自動駕駛仿真場景重建的關(guān)鍵技術(shù)

康謀方案 | 基于AI自適應(yīng)迭代的邊緣場景探索方案
一文聊聊自動駕駛測試技術(shù)的挑戰(zhàn)與創(chuàng)新

自動駕駛汽車安全嗎?

康謀技術(shù) | 毫米波雷達技術(shù)解析

康謀分享 | 直面AD/ADAS快速開發(fā)挑戰(zhàn):IVEX自動駕駛場景管理及分析平臺!

康謀分享 | 汽車仿真與AI的結(jié)合應(yīng)用

FPGA在自動駕駛領(lǐng)域有哪些優(yōu)勢?
FPGA在自動駕駛領(lǐng)域有哪些應(yīng)用?
康謀分享 | 自動駕駛聯(lián)合仿真——功能模型接口FMI(四)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論