") 康謀方案 | 基于AI自適應迭代的邊緣場景探索方案
康謀方案 | 基于AI自適應迭代的邊緣場景探索方案

構建巨量的駕駛場景時,測試ADAS和AD系統(tǒng)面臨著巨大挑戰(zhàn),如傳統(tǒng)的實驗設計(Design of Experiments, DoE)方法難以有效覆蓋識別駕駛邊緣場景案例,但這些邊緣案例恰恰是進一步提升自動駕駛系統(tǒng)性能的關鍵。
本文分享aiFab解決方案,該方案現(xiàn)已具備了更為先進的自適應測試方法,顯著提升了尋找極端邊緣案例并進行分析的能力。
一、傳統(tǒng)解決方案:靜態(tài)DoE
標準的DoE方案旨在系統(tǒng)性地探索場景的參數(shù)空間,從而確保能夠實現(xiàn)完全的測試覆蓋范圍。但在邊緣案例,比如暴露在潛在安全風險的場景或是ADAS系統(tǒng)性能極限場景時,DoE方案通常會失效,讓我們看一些常見的DoE方案:
1、網(wǎng)格搜索法(Grid)
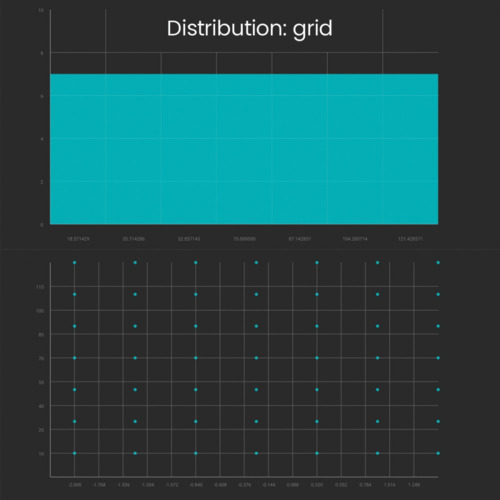
實現(xiàn)原理:將場景空間按照網(wǎng)格進行劃分,并測試所有的參數(shù)組合。
優(yōu)勢:確保覆蓋所有的范圍。
缺點:在大參數(shù)空間下計算耗時將會難以估計。
2、隨機抽樣(Random Sampling)
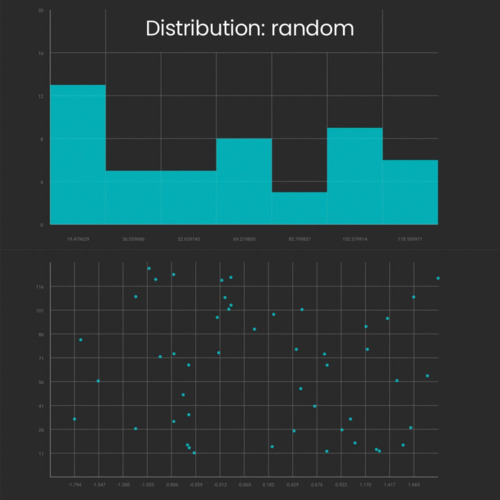
實現(xiàn)原理:在定義的參數(shù)空間內進行隨機選擇測試樣例。
優(yōu)勢:易于實現(xiàn),而且擴展性能好。
缺點:可能會錯過重要的樣例從而導致測試效果大打折扣。
3、拉丁超立方體抽樣(LHS)
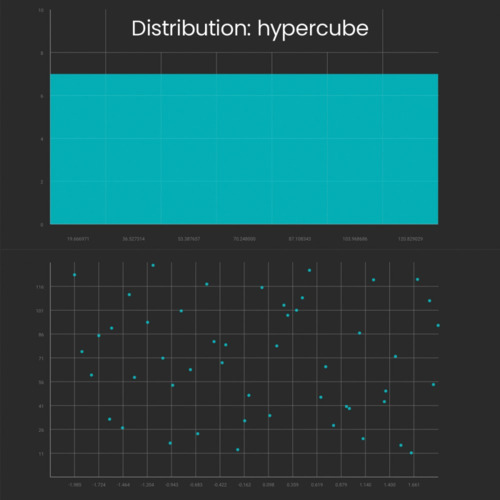
實現(xiàn)原理:確保每個參數(shù)在相應區(qū)間內進行均勻采樣,從而改善數(shù)據(jù)結果的分布。
優(yōu)勢:比隨機抽樣效率更高,覆蓋范圍更加合理,樣本分布也更均衡。
缺點:過于均衡從而無法有效考慮到邊緣案例的情況。
這些傳統(tǒng)方法在一定程度上覆蓋了ADAS和AD系統(tǒng)場景測試范圍,但是其結果或多或少都存在一定的缺陷,如針對于邊緣場景,傳統(tǒng)方法沒有考慮高風險因素以及自適應學習過往測試結果的過程,針對這一點我們分享一個新的自適應DoE解決方案:aiFab解決方案。
二、aiFab解決方案
在傳統(tǒng)的DoE方案中,將所有的場景視作同等重要,然而事實上,在ADAS/AD系統(tǒng)的測試過程中,邊緣場景則影響著關鍵性能的提升。在康謀aiFab解決方案中,基于AI的自適應DoE解決方案將會根據(jù)先前的測試結果,動態(tài)選擇測試用例,在未通過的案例中學習并調整泛化注意力。
1、貝葉斯優(yōu)化(BO):通過學習優(yōu)化的智能測試
貝葉斯優(yōu)化將全量搜索場景的方法轉換成由數(shù)據(jù)驅動的智能方案,與隨機取樣等方案不同:
(1)BO方案將會預測最有可能暴露失敗風險的新測試用例。
(2)BO方案采用替代模型Surrogate model,比如采用高斯過程Gaussian Processes,然后通過已有的數(shù)據(jù)來逼近測試場景參數(shù)與關鍵性指標的映射目標函數(shù)。
(3)然后結合采集函數(shù)Acquisition Function,比如通過下置信屆LCB或者期望改進EI等方法,有效平衡“探索”和“利用”之間的取舍,在有限次數(shù)測試下,有效找到目標函數(shù)的最優(yōu)解。
2、映射目標函數(shù)之關鍵性指標
貝葉斯優(yōu)化依靠關鍵性指標(KPI)決定了是否為目標場景,aiFab中常見的KPI包括:
(1)碰撞時間TTC:決定車輛距離碰撞有多近
(2)入侵后時間PET:交通沖突后剩余時間間隔
(3)速度變化Delta-v:車輛碰撞過程中的速度變化
通過不同的KPI更新模型,我們的泛化方案能夠將計算資源集中在最需要的地方,從而更高效的發(fā)現(xiàn)關鍵邊緣場景,而不是在常規(guī)場景上耗費時間。
3、仿真記錄演示
為說明aiFab自適應泛化場景,以下通過一系列仿真記錄來演示自車在不同臨界指標下左轉的場景,每次迭代將會始終關注更為嚴苛的邊緣案例,以確保能夠發(fā)現(xiàn)潛在風險。
原始記錄:
速度變化(Delta-v):當Ego車輛與 Exo1車輛進行正面高速碰撞時,通過最大化它們的速度,可以使碰撞時的 Delta-v達到最大,從而增加碰撞的嚴重性。
入侵后時間(PET):用于評估潛在碰撞或接近碰撞的風險,即那些可能由于交通流或信號變化而產生的高風險情形。
入侵時間(ET):評估車輛在交通沖突區(qū)域(如交叉口或其他關鍵區(qū)域)停留時間的指標,特別是當車輛的速度較低時。它反映了“Ego”車輛在這些區(qū)域內暴露于潛在風險的時間長度。
潛在碰撞時間(PTTC):是通過車道基礎的度量來實現(xiàn)的,主要聚焦于識別和預防發(fā)生追尾碰撞的可能性。
三、結語
憑借最新的自適應DoE功能,aiFab給ADAS/AD驗證帶來了諸多益處:
(1)更快的發(fā)現(xiàn)邊緣案例:找到高風險場景而無需全量的網(wǎng)格測試
(2)更低的資源耗費:專注于特定方向的案例場景
(3)更好的風險覆蓋范圍:提升檢測稀少邊緣關鍵場景的能力
通過將自適應測試集成到aiFab中,aiFab解決方案提高了效率,同時增強了ADAS和自主系統(tǒng)的安全性、性能和信心。
-
測試
+關注
關注
8文章
5708瀏覽量
128929 -
仿真
+關注
關注
52文章
4290瀏覽量
135917 -
AI
+關注
關注
88文章
35194瀏覽量
280308 -
自動駕駛
+關注
關注
790文章
14326瀏覽量
170750 -
汽車
+關注
關注
15文章
3861瀏覽量
39578
發(fā)布評論請先 登錄
基于DSP的自適應濾波器的設計方案

借助自適應模塊化系統(tǒng) (SOM)加速邊緣創(chuàng)新

自適應逆變電源的設計與實現(xiàn)
基于react-app配置移動端自適應—淘寶彈性布局方案
EdgeBoard FZ5 邊緣AI計算盒及計算卡
我愛方案網(wǎng)上線RK3399 Pro AI主板方案 非常適合AIoT機器視覺和邊緣計算應用
瑞芯微和英偉達的邊緣計算盒子方案,你會選哪一家的?
顯控和AI計算機方案趨勢
索尼投資樹莓派,共同開發(fā)邊緣 AI 解決方案
逆變電源的自適應重復控制方案
迭代自適應可逆圖像水印算法
一種自適應迭代學習的控制方法及設計方案

賽靈思推出自適應SOM為AI賦能邊緣應用提供更高效解決方案
康謀分享 | 汽車仿真與AI的結合應用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論