") 基于RISC-V芯片Bianbu Robot機(jī)器人解決方案
基于RISC-V芯片Bianbu Robot機(jī)器人解決方案

AI機(jī)器人作為新質(zhì)生產(chǎn)力的代表,正在蓬勃高速發(fā)展。進(jìn)迭時(shí)空基于RISC-V AI CPU K1芯片推出Bianbu Robot機(jī)器人解決方案,服務(wù)AI機(jī)器人等新質(zhì)生產(chǎn)力的發(fā)展。
K1芯片采用CPU與AI同構(gòu)融合架構(gòu),提供2Tops大模型算力,既能高效運(yùn)行傳統(tǒng)CNN模型,又能支持大模型推理。同時(shí),K1芯片集成了一顆小核協(xié)處理器,該協(xié)處理器可獨(dú)立運(yùn)行 RTOS系統(tǒng),專責(zé)管理芯片上的各路電源開關(guān)。在實(shí)際產(chǎn)品應(yīng)用中,AI CPU與協(xié)處理器各司其職、高效協(xié)同,保障系統(tǒng)實(shí)現(xiàn)高效、低功耗且穩(wěn)定的運(yùn)行。
機(jī)器人核心應(yīng)用場景
隨著大模型的快速發(fā)展,AI機(jī)器人市場也在快速興起。K1芯片從底層計(jì)算架構(gòu)出發(fā),為AI機(jī)器人多樣化功能提供完整解決方案,兼容本地大模型與云端大模型計(jì)算,形成云端一體協(xié)同方案:
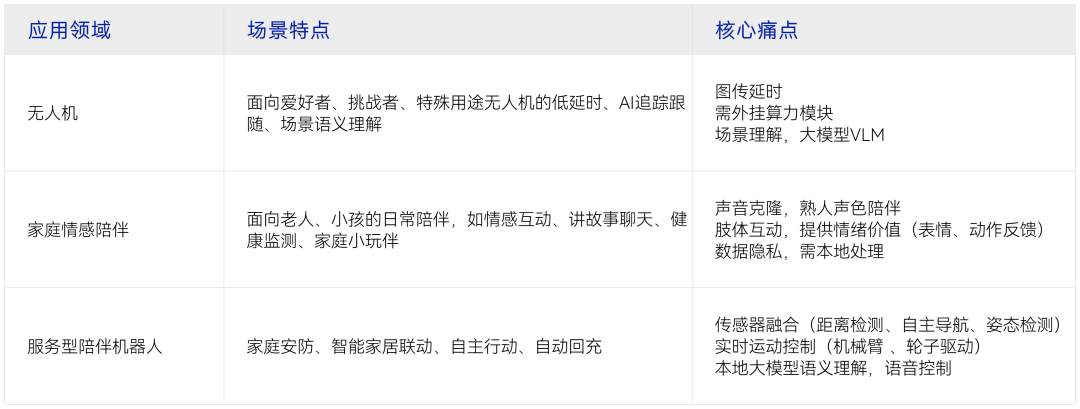
Bianbu Robot機(jī)器人整體解決方案,在夯實(shí)系統(tǒng)底層能力的基礎(chǔ)上,集成了多項(xiàng)功能模塊,全面支撐AI機(jī)器人產(chǎn)品的快速開發(fā)與規(guī)模化應(yīng)用。
方案介紹
Bianbu Robot機(jī)器人解決方案搭載K1芯片,有效支持語音識別、視覺感知等關(guān)鍵任務(wù)處理。方案集成大語言模型能力,實(shí)現(xiàn)自然語言交互與多任務(wù)智能編排,廣泛適配無人機(jī)、清潔機(jī)器人、四足機(jī)器人、機(jī)械臂、AI智能玩具等多類型智能終端的落地應(yīng)用。
技術(shù)方案架構(gòu)
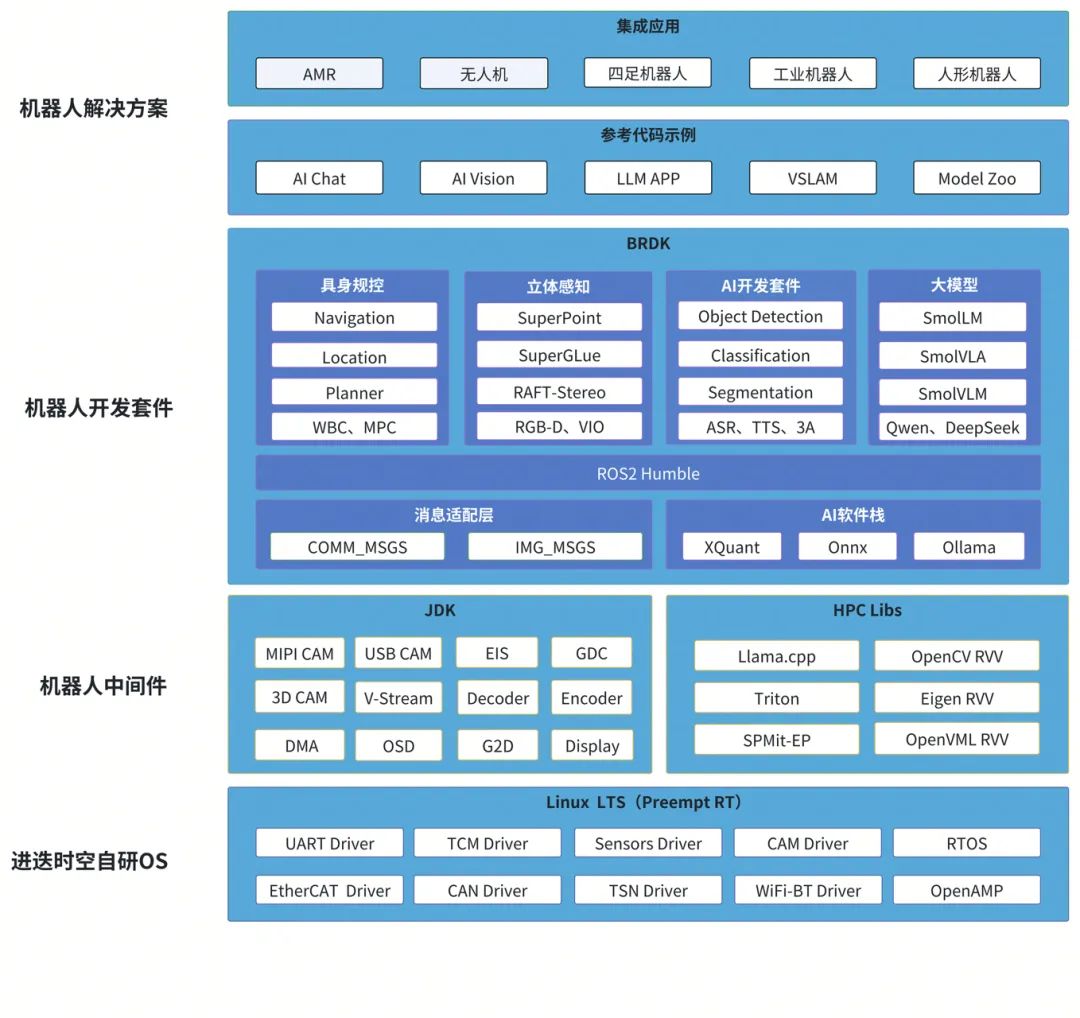
系統(tǒng)方面,Bianbu Robot方案基于Bianbu ROS機(jī)器人操作系統(tǒng),面向AI機(jī)器人領(lǐng)域提供完整系統(tǒng)參考。Bianbu ROS以進(jìn)迭時(shí)空自研操作系統(tǒng)Bianbu OS為內(nèi)核底座,以ROS2為運(yùn)行核心,集成深度優(yōu)化的機(jī)器人中間件和SDK,涵蓋多媒體中間件JDK、高性能計(jì)算庫HPC Libs和開發(fā)套件BRDK。
BRDK(Bianbu ROS Dev Kit)
BRDK基于ROS2系統(tǒng)進(jìn)行深度抽象與模塊化封裝,面向AI機(jī)器人產(chǎn)品開發(fā)高度貼合實(shí)際應(yīng)用的開源參考方案。其核心特性包括:
集成AI開發(fā)工具鏈
內(nèi)置量化工具鏈、基礎(chǔ)預(yù)訓(xùn)練模型庫(Model Zoo)及示例代碼,支持主流模型格式與部署流程,實(shí)現(xiàn)開箱即用的開發(fā)體驗(yàn)。
適配主流開源大模型
原生支持DeepSeek、Qwen、Hugging Face Smol*系列等主流開源大模型,集成大模型編排框架 LocalAI,前端調(diào)用接口完全兼容 OpenAI API,便于快速對接現(xiàn)有應(yīng)用生態(tài)。
完整語音處理解決方案
提供產(chǎn)品級ASR(語音識別)與TTS(語音合成)模型庫,配套多麥克風(fēng)陣列前處理、聲源定位SDK、語音降噪與回聲消除模塊,覆蓋從感知到交互的全鏈路語音處理。
開源ROS2服務(wù)組件
提供豐富的開源ROS2功能包,包括視覺感知、語音交互、傳感器接入、具身機(jī)械控制、定位導(dǎo)航與LLM任務(wù)編排等服務(wù),支持模塊化集成與定制化開發(fā)。
參考應(yīng)用Pipeline全鏈路示例
提供涵蓋數(shù)據(jù)采集、處理、建模與交互的端到端參考流程,助力開發(fā)者快速構(gòu)建完整的機(jī)器人應(yīng)用系統(tǒng)。
JDK(Jobot Dev Kits)
JDK基于基礎(chǔ)操作系統(tǒng),對數(shù)據(jù)通路進(jìn)行了高度封裝,旨在實(shí)現(xiàn)功能模塊化與代碼高效復(fù)用,使開發(fā)者專注于構(gòu)建高層Pipeline,而無需關(guān)心底層數(shù)據(jù)調(diào)度與系統(tǒng)細(xì)節(jié)。其主要特性包括:
IO HUB數(shù)據(jù)樞紐
兼容多種協(xié)議的相機(jī)設(shè)備,支持?jǐn)?shù)據(jù)零拷貝傳輸,極致壓縮系統(tǒng)帶寬,顯著降低功耗開銷。
軟硬結(jié)合的Pipeline加速
Pipeline流程充分調(diào)度芯片內(nèi)置硬件加速單元,支持圖像縮放、旋轉(zhuǎn)、裁剪、混合(blending)等高性能圖像處理操作。
功能模塊化編程模型
全流程支持模塊化“搭積木式”編程,涵蓋數(shù)據(jù)采集、編碼壓縮、模型推理、圖像打水印、視頻顯示與多路重推流等功能模塊,便于靈活組合與快速開發(fā)。
低延遲直顯機(jī)制
提供靈活的視頻直顯策略,優(yōu)化幀緩沖路徑,顯著壓縮視頻通路延遲,滿足高實(shí)時(shí)性應(yīng)用需求。
OpenCL加速庫支持
集成豐富的圖像增強(qiáng)與穩(wěn)定算法庫,包含畸變矯正、電子防抖(EIS)等功能,通過AI CPU加速實(shí)現(xiàn)高效圖像處理。
HPC Libs(High Performance Libraries)
高性能計(jì)算能力在機(jī)器人感知與控制任務(wù)中至關(guān)重要。Bianbu Robot提供優(yōu)化深度的高性能計(jì)算引擎,最大化發(fā)揮K1芯片硬件潛力,助力智能系統(tǒng)實(shí)現(xiàn)低延遲、高吞吐的推理與計(jì)算性能。主要特性包括:
基礎(chǔ)計(jì)算庫
集成多種主流基礎(chǔ)計(jì)算庫,包括機(jī)器視覺庫OpenCV,基礎(chǔ)數(shù)學(xué)庫OpenVML,線性計(jì)算庫Eigen/OpenBLAS等,基于RISC-V平臺做了向量化優(yōu)化和深度調(diào)優(yōu),充分發(fā)揮256-bit RISC-V Vector Extension(RVV)性能。
AI算子庫
基于遵循IME(Intelligent Matrix Engine)標(biāo)準(zhǔn)的自定義AI指令,構(gòu)建元算子級別的AI算子庫。通過調(diào)用標(biāo)準(zhǔn)算子API,即可獲得澎湃的AI算力。
AI推理加速后端
深度適配RISC-V平臺,進(jìn)行了算子融合,多線程調(diào)度,內(nèi)存優(yōu)化,SARM動態(tài)切分等深度優(yōu)化,無縫接入ONNXRuntime,Llama.cpp等主流推理生態(tài)。
高性能計(jì)算語言
基于OpenAI Triton深度適配RISC-V后端,可使用Python編寫出接近硬件峰值性能的高效算子。支持將主流CUDA推理任務(wù)快速遷移至RISC-V平臺,顯著降低適配成本,加速落地應(yīng)用。
方案特點(diǎn)
Bianbu Robot機(jī)器人解決方案專注于語音算法、AI視覺與大模型應(yīng)用,提供開箱即用的模塊化服務(wù),緊密結(jié)合芯片性能,助力客戶加速方案落地。SDK源碼開放,支持開發(fā)者自由創(chuàng)新。
支持豐富的 Model Zoo
涵蓋大模型應(yīng)用、語音處理及傳統(tǒng)視覺AI模型。
大模型應(yīng)用
兼容Qwen2系列、DeepSeek-1.5b、SomlLM2、SomlVLM、SomlVLA系列,支持大模型語音對話,端到端語音對話延時(shí)低于 1.5 秒。
語音處理
涵蓋VAD、ASR、TTS、DOA、NS及多麥克風(fēng)聲源定位。
傳統(tǒng) AI 視覺
提供目標(biāo)檢測、分類、追蹤等深度優(yōu)化基礎(chǔ)模型,滿足1000+應(yīng)用場景需求。
定位與建圖
支持激光導(dǎo)航、單目視覺VSLAM、雙目里程計(jì)方案。
支持 Linux PreemptRT
兼容工業(yè)控制協(xié)議EtherCAT、CAN、RS485/232,滿足實(shí)時(shí)控制需求。
低延時(shí)視頻通路
支持最高1080P@120FPS編碼,滿足無人機(jī)低延時(shí)視頻需求。
完善配套工具鏈
包括優(yōu)化的GCC/Clang編譯器、量化工具及大模型微調(diào)工具。
方案優(yōu)勢
當(dāng)前AI機(jī)器人多依賴聯(lián)網(wǎng),隱私保護(hù)成為關(guān)鍵挑戰(zhàn)。進(jìn)迭時(shí)空的云端協(xié)同方案有效解決了大模型落地的核心難題:
開發(fā)靈活性
Linux SDK系統(tǒng)源碼全面開放,配備豐富調(diào)試工具,便于客戶擴(kuò)展應(yīng)用與自定義算法開發(fā)。
成本優(yōu)勢
K1端側(cè)承擔(dān)基礎(chǔ)AI推理任務(wù),降低對云端算力服務(wù)器的依賴,減少系統(tǒng)整體運(yùn)營成本。
性能平衡
結(jié)合端側(cè)輕量推理與云端高算力計(jì)算,既保障本地大模型智能升級,又避免純云端方案帶來的高延遲,實(shí)現(xiàn)產(chǎn)品隨時(shí)在線智能響應(yīng)。
隱私增強(qiáng)
通過本地算力就地處理隱私敏感任務(wù)(如語音轉(zhuǎn)文字ASR),符合多國隱私保護(hù)法規(guī)要求,解決大模型應(yīng)用的合規(guī)難題。
-
芯片
+關(guān)注
關(guān)注
459文章
52465瀏覽量
440326 -
機(jī)器人
+關(guān)注
關(guān)注
213文章
29709瀏覽量
212713 -
RISC-V
+關(guān)注
關(guān)注
46文章
2549瀏覽量
48737 -
進(jìn)迭時(shí)空
+關(guān)注
關(guān)注
0文章
31瀏覽量
129
發(fā)布評論請先 登錄
畢超博士:基于RISC-V的機(jī)器人電機(jī)控制芯片

risc-v多核芯片在AI方面的應(yīng)用
國產(chǎn)RISC-V芯片性能穩(wěn)定嗎?
RISC-V在AI領(lǐng)域的發(fā)展前景怎么樣?
risc-v芯片在電機(jī)領(lǐng)域的應(yīng)用展望
香蕉派 BPI-CM6 工業(yè)級核心板采用進(jìn)迭時(shí)空K1 8核 RISC-V 芯片開發(fā)
大象機(jī)器人攜手進(jìn)迭時(shí)空推出 RISC-V 全棧開源六軸機(jī)械臂產(chǎn)品
智能掃地機(jī)器人解決方案
為什么選擇RISC-V?
家用機(jī)器人Q3數(shù)據(jù)弱,但是機(jī)器人黑馬融資猛進(jìn)
基于RISC-V開放架構(gòu)的存算一體化芯片解決方案

基于RISC-V內(nèi)核的嵌入式系統(tǒng)在機(jī)器人關(guān)節(jié)控制中的應(yīng)用研究
大象機(jī)器人×進(jìn)迭時(shí)空聯(lián)合發(fā)布全球首款RISC-V全棧開源小六軸機(jī)械臂

大象機(jī)器人攜手進(jìn)迭時(shí)空推出 RISC-V 全棧開源六軸機(jī)械臂產(chǎn)品






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論