 基于英飛凌TLD4020-3ET芯片的LIN總線自動尋址技術
基于英飛凌TLD4020-3ET芯片的LIN總線自動尋址技術

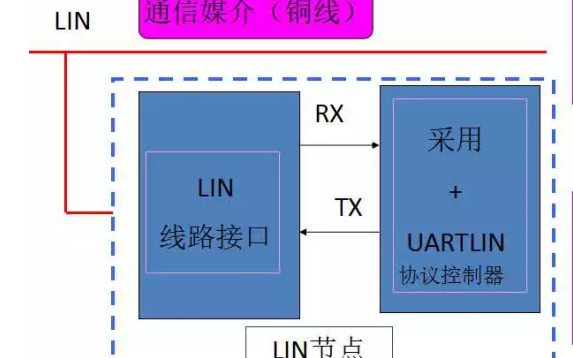
LIN (Local InterconnectNetwork) 總線,是基于 UART/SCI (Universal Asynchronous Receiver-Transmitter/Serial Communication Interface 通用異步收發器/串行通信接口) 的低成本串行通信協議。LIN 自動尋址 (Auto-Addressing) 是 LIN 協議中的一個重要功能,它保障了通信系統的穩定性和可靠性。
本文將介紹基于英飛凌 TLD4020-3ET 芯片的 LIN 總線自動尋址 (Auto-Addressing) 技術,包括其硬件特性、實現流程及關鍵參數配置。
一、英飛凌 TLD4020-3ET 芯片概述
英飛凌 TLD4020-3ET 是一款三通道設備,配備集成且受保護的輸出級。它專為控制 RGB LED 而設計,最大電流可達 51.5mA。以下為 TLD4020-3ET 的關鍵特性:
32 位 Arm Cortex-M23 核心
片上內存
? 32kB 閃存 (包括 1000TP 內存)
? 576 字節 1000TP 內存
? 3kB SRAM
? Boot ROM用于啟動固件和flash例程
片上振蕩器和通過 2 線 SWD 實現的片上調試支持
實現 LIN 自動尋址的設備需要具備以下特性:
分流電壓測量 (Shunt voltage measurement)
上拉和恒流源配置 (Pull-up and current source configuration)
下圖 (圖1) 展示了 TLD4020-3ET 滿足自動尋址的內部特性框圖。根據參考文件 (UM 8.2.4.1 章節),為了滿足自動尋址,LIN 芯片需要具備 ADC 和上拉可控的恒流源,便于測量。
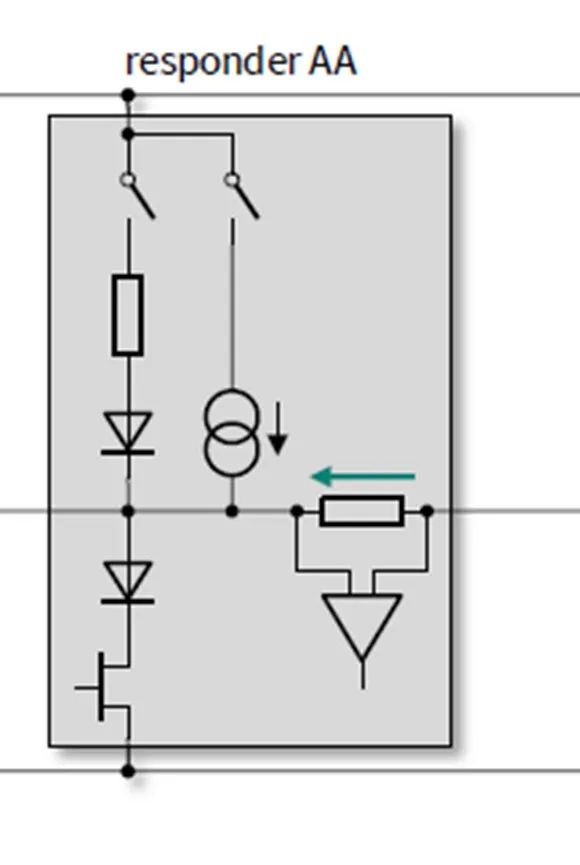
圖1 TLD4020-3ET 滿足自動尋址的內部特性框圖
二、自動尋址流程
下圖 (圖2) 為自動尋址的流程框圖。在收到正式的自動尋址指令后,芯片首先會執行 Deactivate pull-ups 操作,確保所有節點處于初始狀態,接著進行在線芯片的 Slave alredy addressed ? 確認,已有地址的芯片可以不再參與自動尋址 (需在 Master 內設置)。所以一般在自動尋址開始之前會清除所有 AA 芯片的 Address。
確認所有滿足自動尋址條件的芯片未分配地址后,要進行第一次 IDIFF 1 的對比確認 (即圖 2 中的 step1 到 step5)。以下重點介紹此過程。
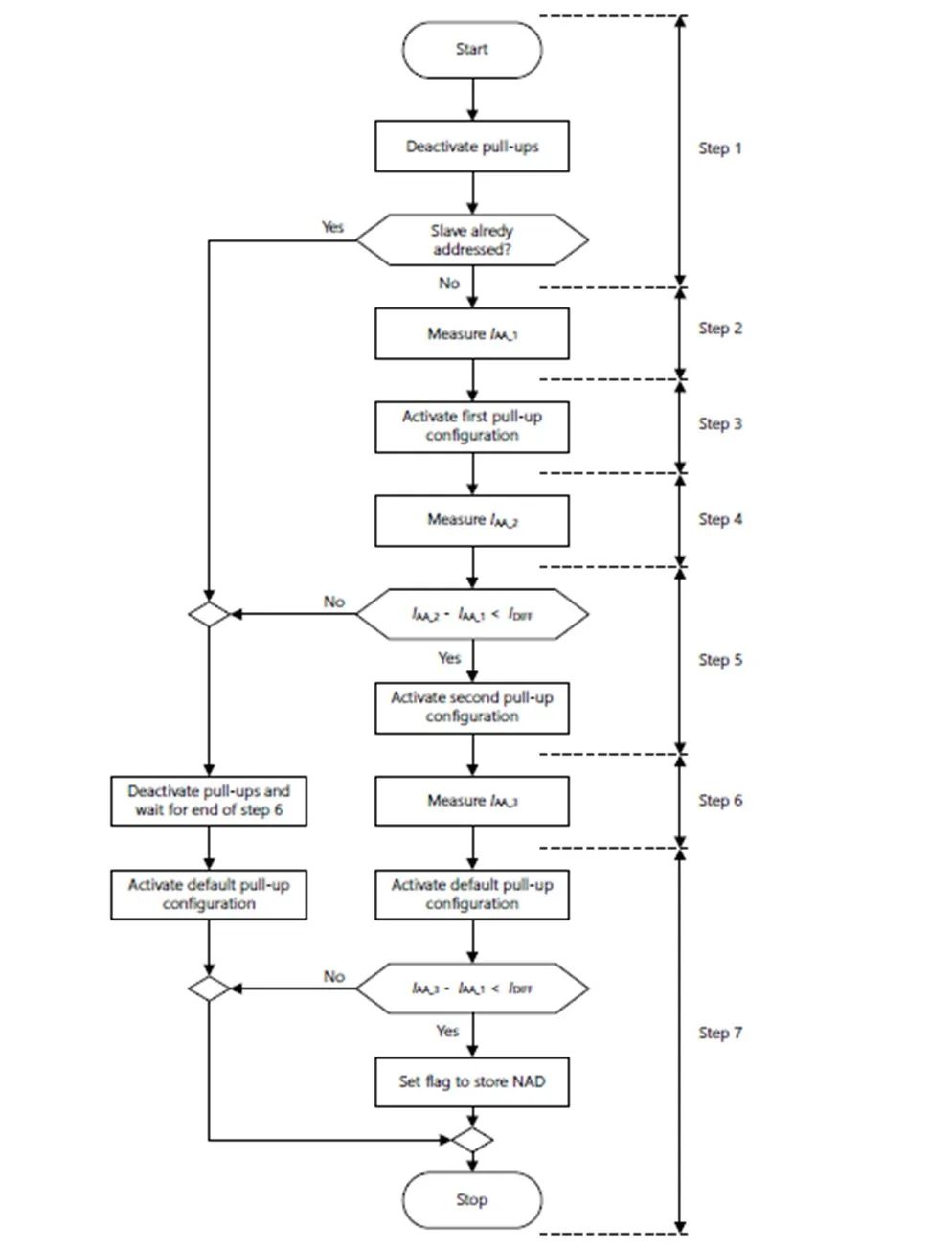
圖2 自動尋址流程框圖
下圖 (圖3) 為一個 Bus Shunt Method (BSM) LIN network 的示意圖,其中 Commander 是 Master,Responder 是不具備自動尋址功能的 slave,Responder AA 是具備自動尋址功能的 slave。在同一個 BSM LIN network 中它們是可以共存的,TLD4020-3ET 即為 Responder AA。
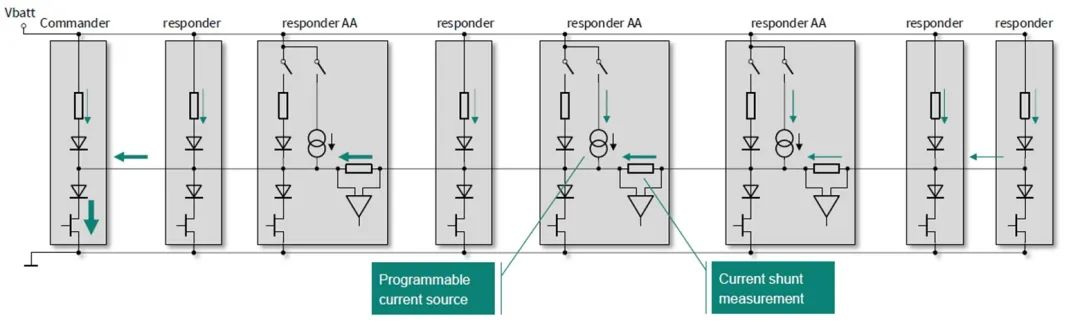
圖3 BSM LIN network 的示意圖
TLD4020-3ET 的 LIN 模塊的內部示意框圖如下圖 (圖4):
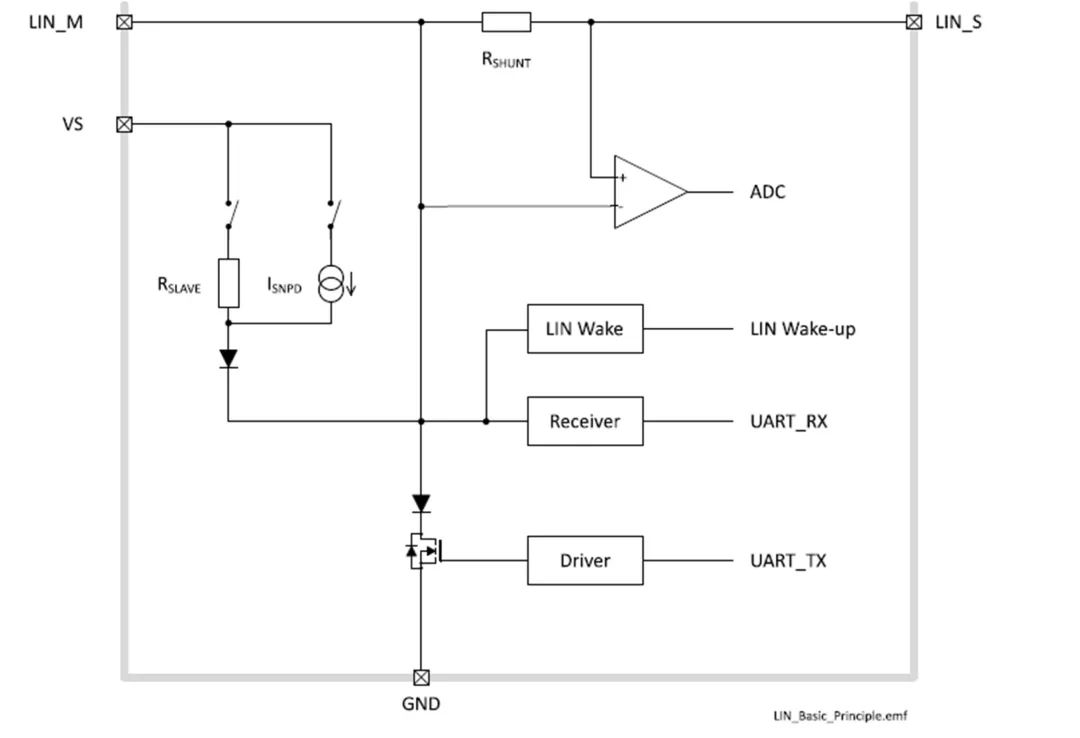
圖4 TLD4020-3ET 的 LIN 模塊的內部示意框圖
在整個自動尋址過程中,AA 芯片需經歷四個階段:OFFSET、PRE-SELECTION、SELECTION 和 ENDING。所有步驟都發生在 BREAK 中。
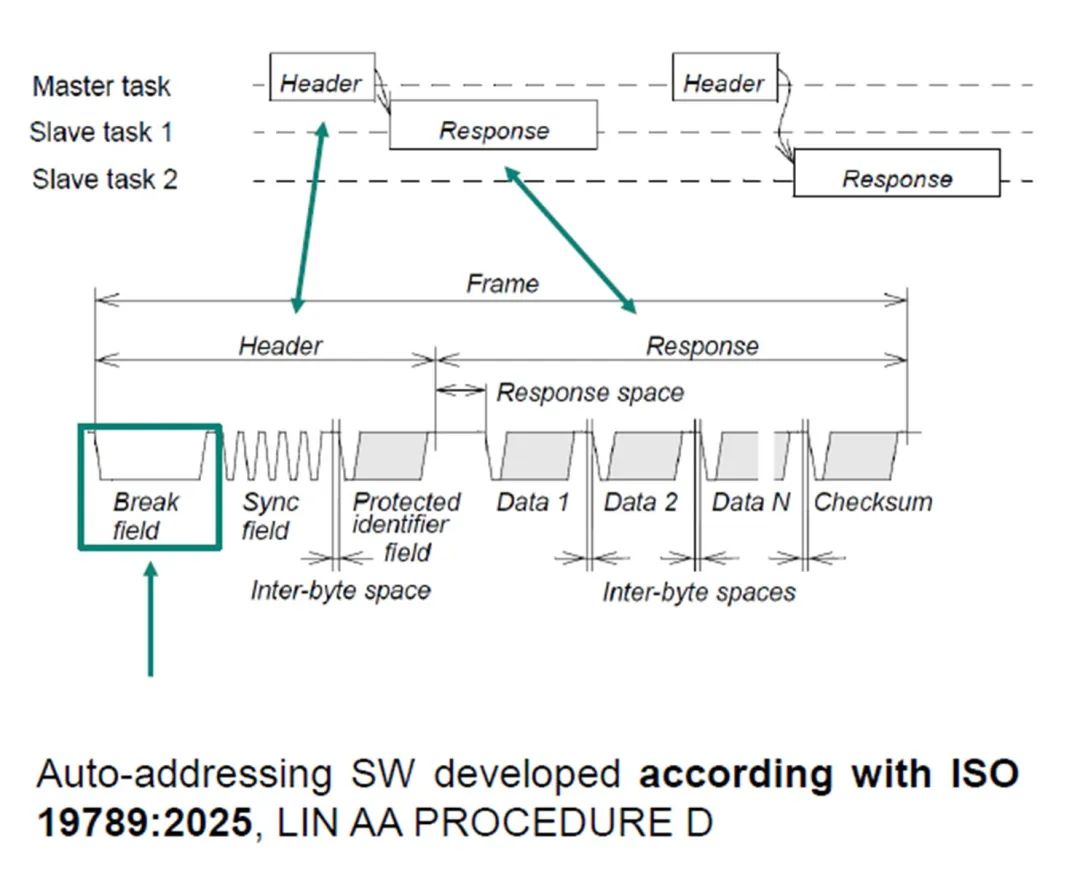
圖5 自動尋址流程示意圖

圖6 自動尋址四個階段示意圖
1OFFSET
在 step1 到 step2 的過程中,系統會測定每個 AA 芯片的基準 IAA_1。在 AA 芯片內的動作如下圖 (圖7)。AA 芯片不接通 pull-up 和 current source,N-AA 芯片正常工作,流過每個 AA 芯片內部 Rshunt 上的電流 Ishunt 僅為此 AA 芯片“更遠端”的 N-AA 的電流。此時:
Ishunt-c (IAA-1) = Ib3+Ib4
Ishunt-b (IAA-1) = Ib3+Ib4
Ishunt-a (IAA-1) = Ib2+Ib3+Ib4
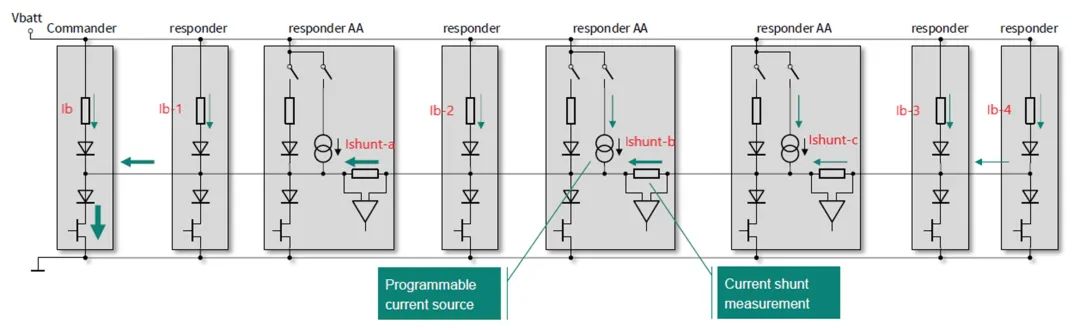
圖7 OFFSET 階段 AA 芯片動作示意圖
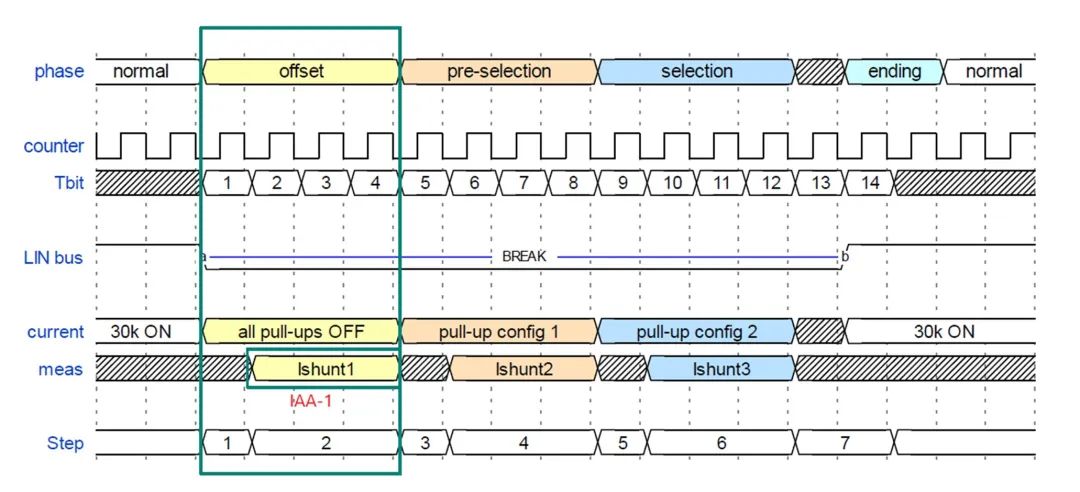
圖8 自動尋址 OFFSET 階段示意圖
2PRE-SELECTION
在 step3 到 step4 的過程中,所有 AA 芯片的 current sources 接通,此時:
Ishunt-c (IAA-2) = Ib3+Ib4
Ishunt-b (IAA-2) = Ib3+Ib4+Ia-c
Ishunt-a (IAA-2) = Ib2+Ib3+Ib4+Ia-c+Ia-b
由此可以算出每個 AA 芯片的 IDIFF (IDIFF = IAA_2 - IAA_1),如果算出的 IDIFF 小于配置的 IDIFF 1 (I_DIFF_TH_1_VAL),認為此 AA 芯片在 Master 的“遠端”,則進入下一次對比的 SELECTION 階段。如果 IDIFF 大于 IDIFF 1 認為此芯片在 Master 的“近端”,則在進入 SELECTION 時,此芯片的 current source 自動斷開,不再參與 SELECTION 的對比。
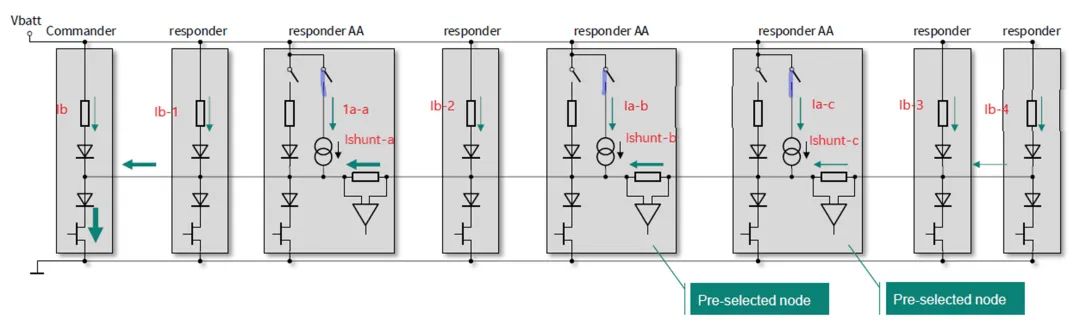
圖9 PRE-SELECTION 階段 AA 芯片動作示意圖
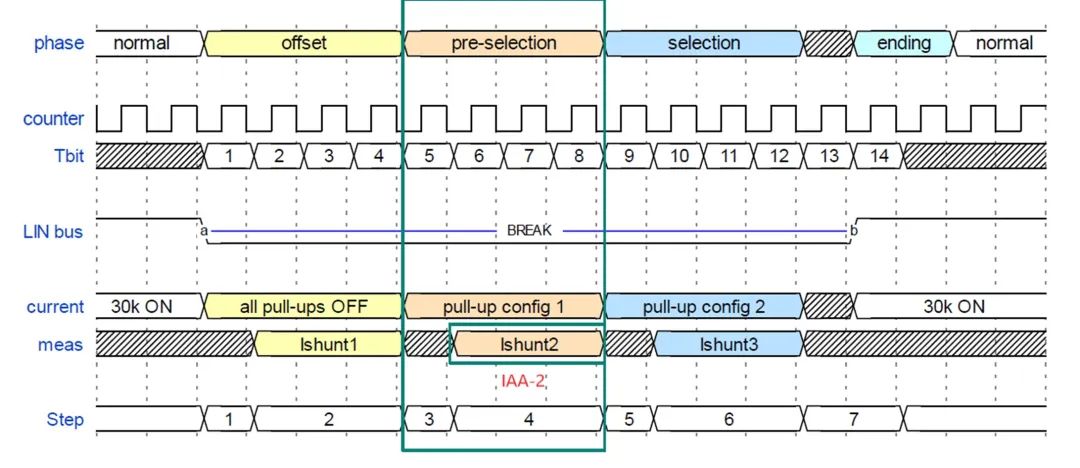
圖10 自動尋址 PRE-SELECTION 階段示意圖
3SELECTION
在 step5 到 step6 的過程中,除了在 PRE-SELECTION 中 current source 斷開的 AA 芯片,剩下的芯片再次進行對比,和 IDIFF 2 比較,確認“最遠端”的 salve。
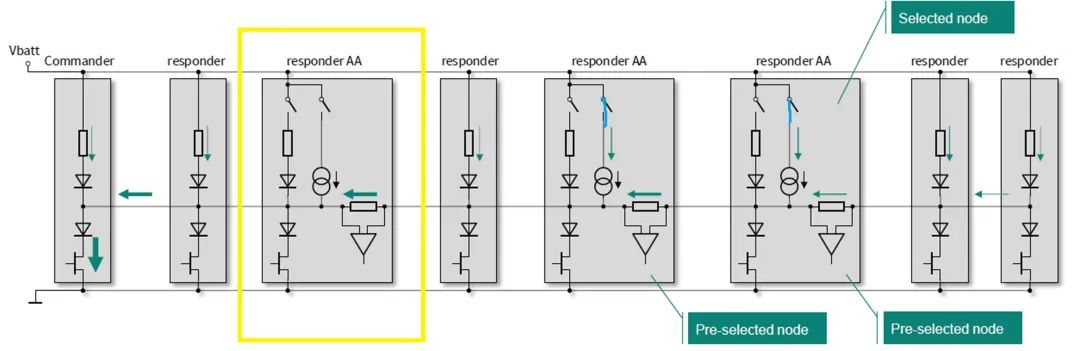
圖11 SELECTION 階段 AA 芯片動作示意圖
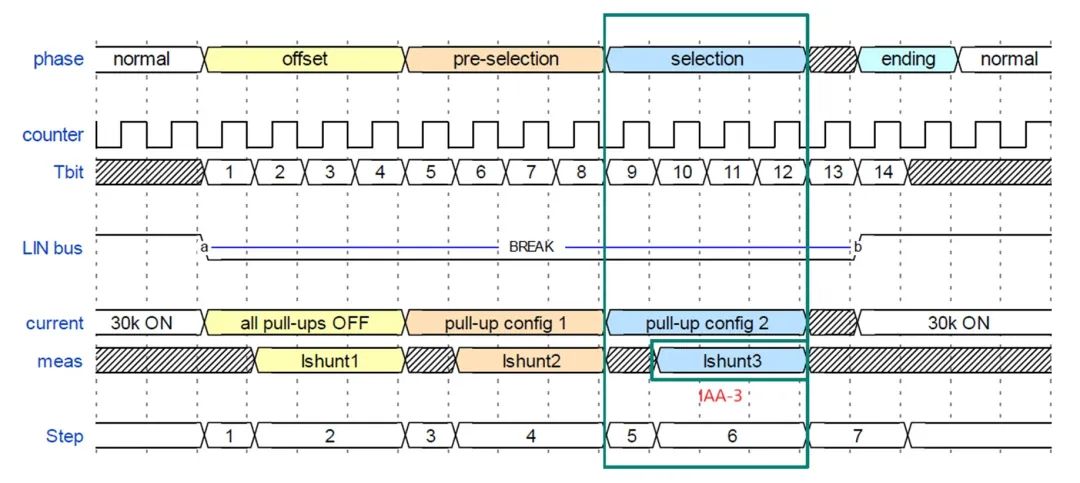
圖12 自動尋址 SELECTION 階段示意圖
4ENDING
step7 完成選擇后,所有 current sources 斷開,所有 pull-ups 正常連接,LIN 正常工作,并在接下來的 FRAME 中給此次的“最遠端”的 slave 分配地址 (地址為可根據需求配置)。需要注意,所有的 Auto-addressing,都必須有開始和結束的 FRAME。

圖13 自動尋址完整 FRAME 示意圖
三、關鍵參數配置
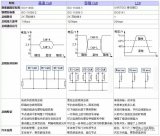
TLD4020-3ET 在 LIN 自動尋址中需要配置的部分參數,包括 PRE-SELECTION 和 SELECTION 階段的上拉電流設置 (圖14、圖15)、LIN自動尋址狀態寄存器 (圖16) 以及 AA_I_DIFF_TH 閾值寄存器 (圖17) 等。
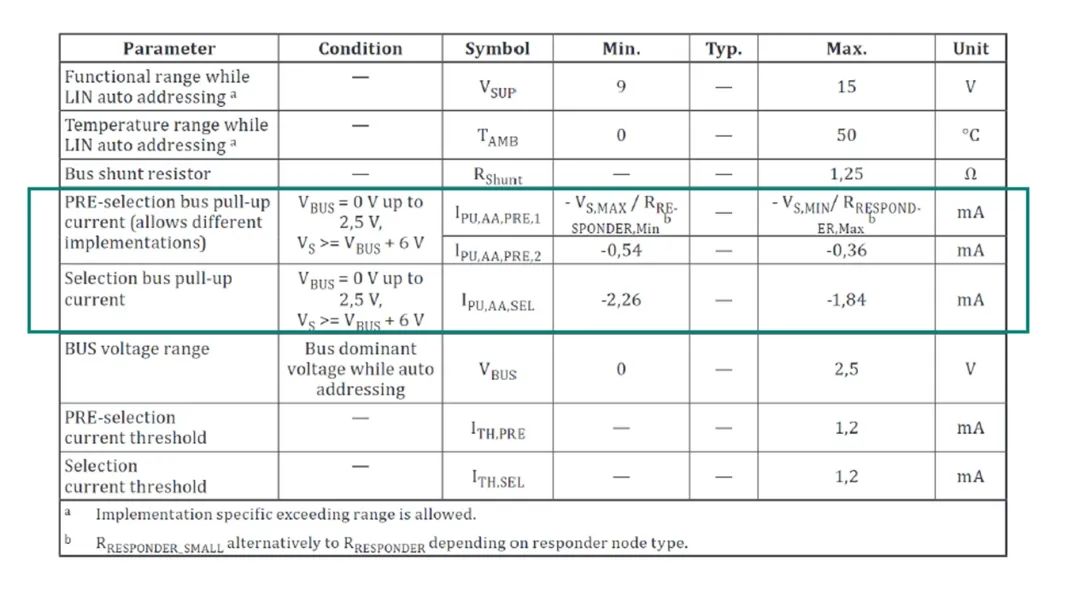
圖14 PRE-SELECTION 和 SELECTION pull-up current
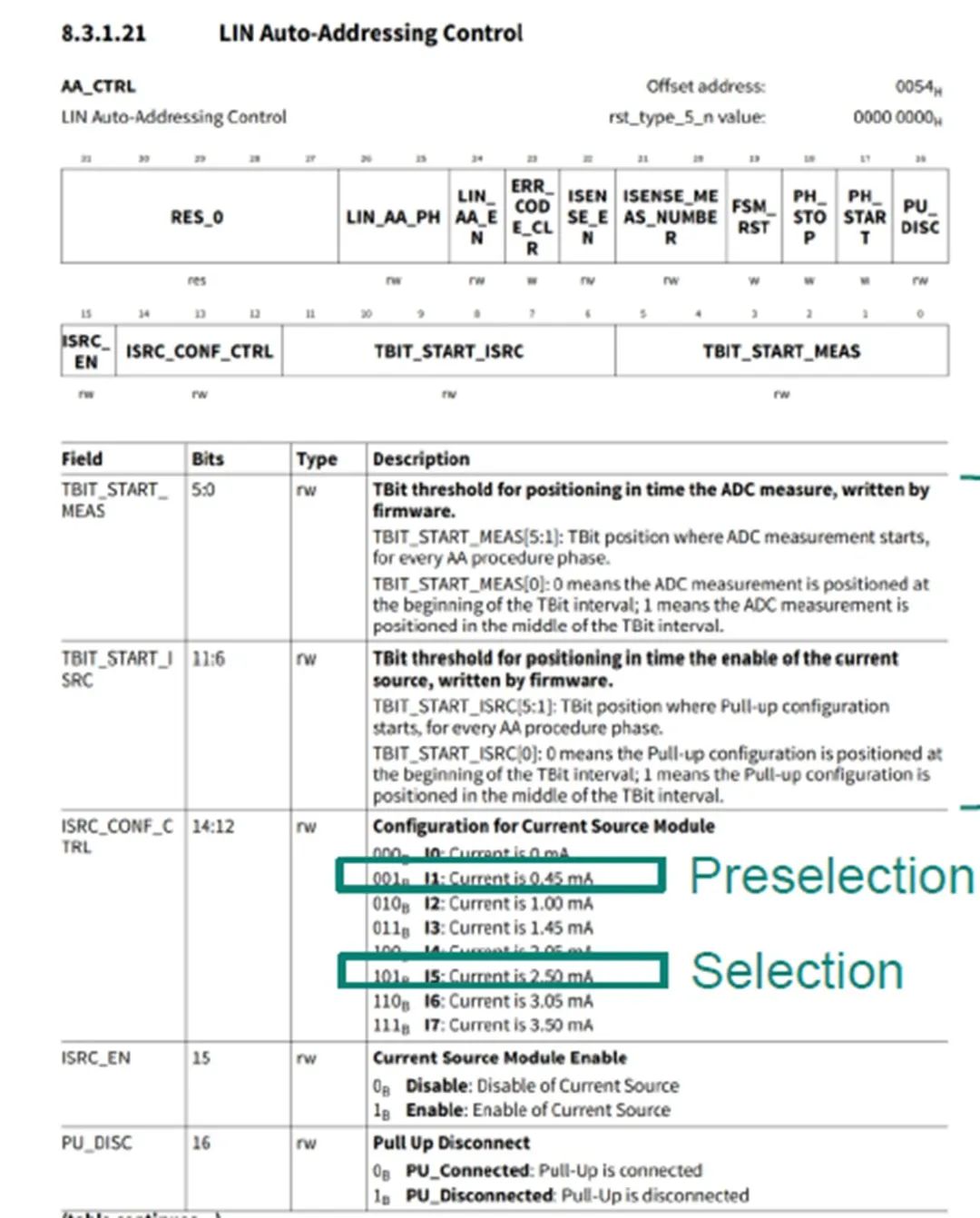
圖15 PRE-SELECTION 和 SELECTION pull-up current
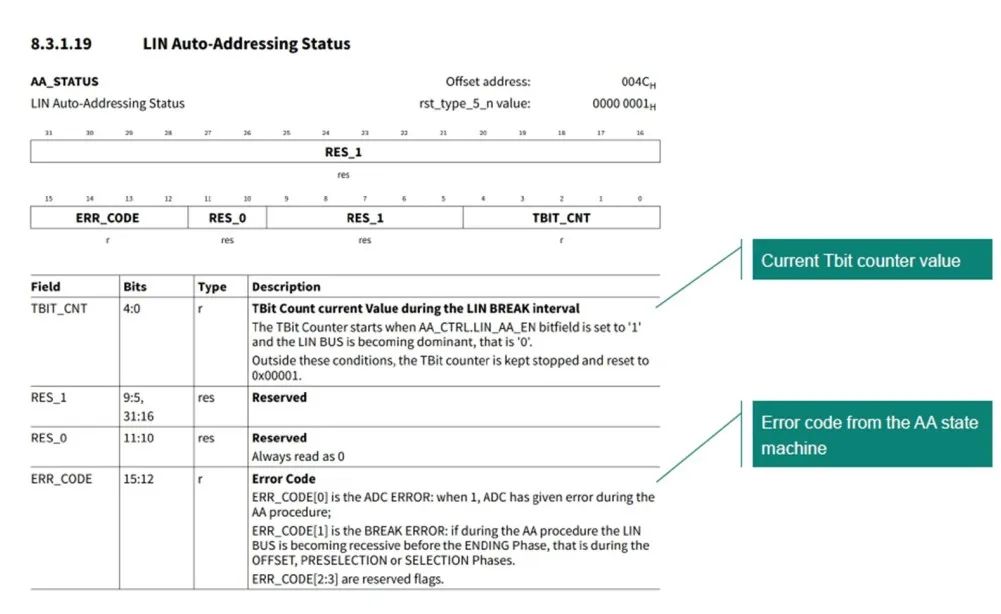
圖16 LIN 自動尋址 Status
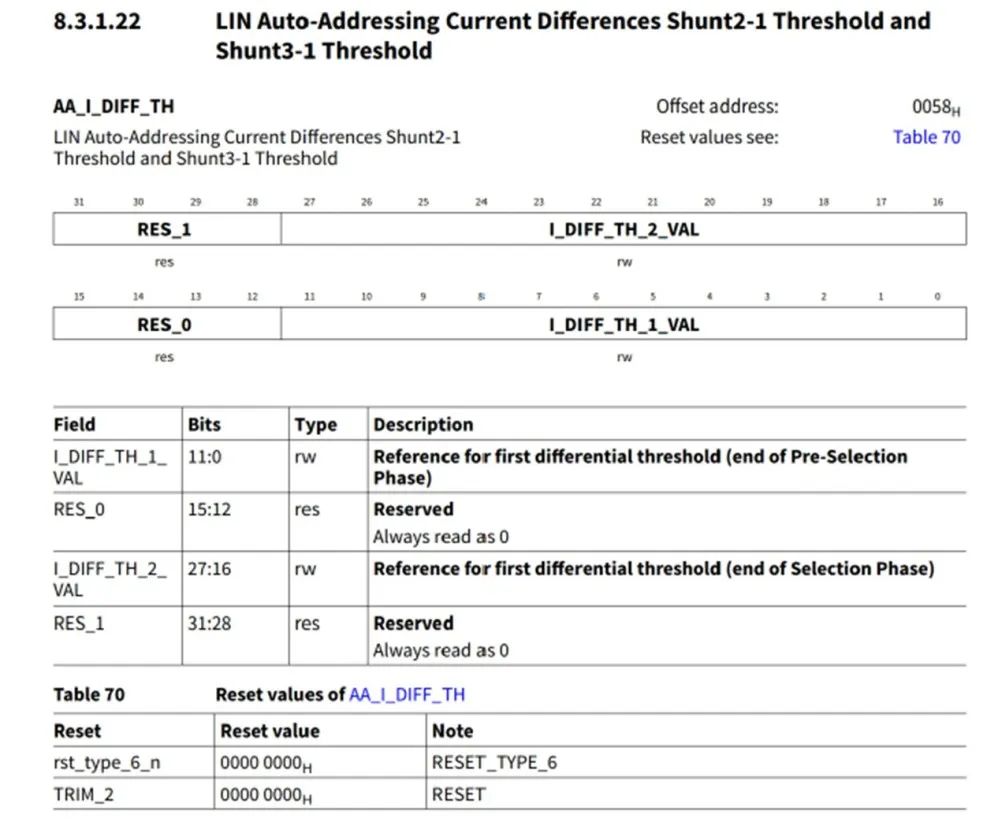
圖17 AA_I_DIFF_TH
四、總結
本文詳細介紹了通過英飛凌 TLD4020-3ET 芯片實現 LIN 自動尋址的原理、流程及配置要點,可為相關應用開發提供參考。
-
英飛凌
+關注
關注
68文章
2343瀏覽量
140577 -
內存
+關注
關注
8文章
3121瀏覽量
75238 -
LIN總線
+關注
關注
19文章
111瀏覽量
28176 -
串行通信
+關注
關注
4文章
588瀏覽量
36175 -
尋址
+關注
關注
0文章
19瀏覽量
7521
原文標題:基于英飛凌 TLD4020-3ET 的 LIN 自動尋址方案解析
文章出處:【微信號:駿龍電子,微信公眾號:駿龍電子】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
英飛凌汽車LED照明及驅動方案詳解
LIN總線的基礎知識

LIN總線通訊特點
基于LIN總線的汽車HID前照燈自動調光系統
帶有LIN自動尋址的RGB氛圍燈解決方案-E521.31
如何實現LIN自動尋址來解決這些問題呢?
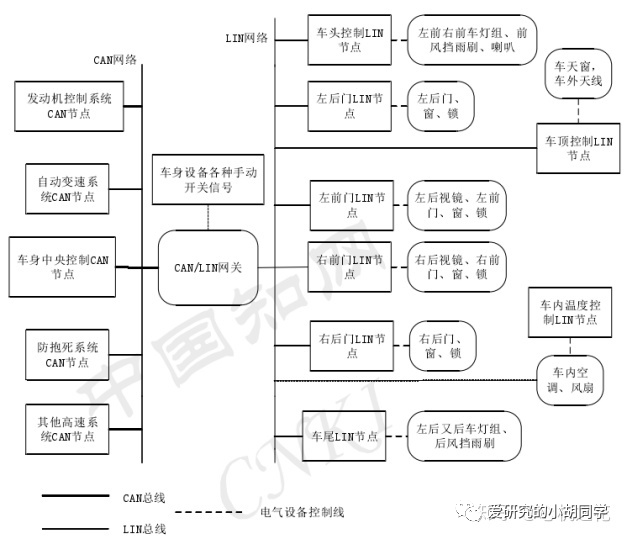
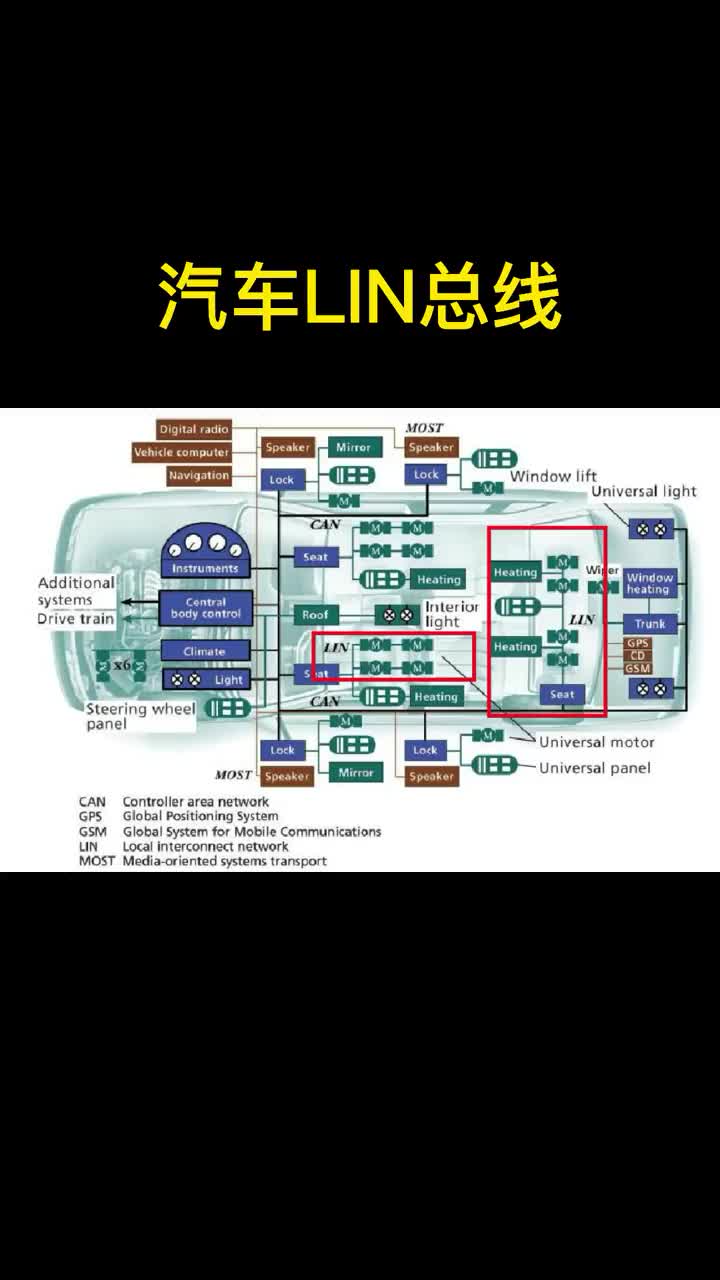
LIN總線是什么?CAN/LIN總線的區別與結構
Lin總線概述及入門

英飛凌LED專用驅動芯片TLD7002-16ES手冊
什么是LIN總線?車載總線之LIN總線概述
Lin收發器原理圖 Lin總線學習筆記





 工商網監
工商網監
評論