 立體視覺技術在智能駕駛中的應用
立體視覺技術在智能駕駛中的應用

中國智能駕駛:普及與挑戰并存
隨著中國汽車產業在海內外的發展壯大,智能駕駛領域呈現出滲透率快速提升與技術下沉并行的鮮明特征。根據Canalys最新預測,2025年中國市場L2級及以上功能的滲透率將達到62%,其中高速NOA滲透率10.8%,城市NOA達到9.9%,曾專屬于高端車型的智能駕駛功能正快速向大眾市場普及。
但功能普及的背后仍存在嚴峻的技術挑戰。中國特有的道路環境包含大量非標準化場景:突然出現的施工區域、隧道內外明暗交替的路段、不規則擺放的警示標識等。這些場景對感知系統提出了極高要求。傳統方案依賴單一視覺或雷達傳感器往往力不從心——單目攝像頭在逆光、低照度環境下表現不穩定,毫米波雷達對靜止目標的識別存在盲區,激光雷達雖精度高但成本難以在主流車型普及。
當行業困于“感知能力天花板”時,立體視覺技術正悄然成為破局關鍵。與傳統攝像頭不同,立體視覺通過模擬人類雙目視差原理,構建了車輛對三維空間的深度理解能力,成為中國智能駕駛技術攻克復雜長尾場景的關鍵突破口。
看見三維世界:立體視覺的本質
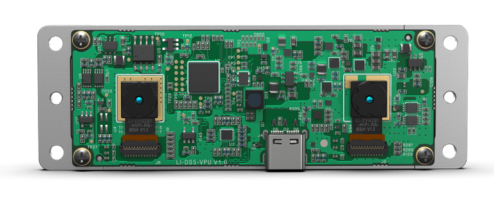
立體視覺技術的核心在于模仿人類雙目視差感知原理。系統通過兩個間距已知的攝像頭同步拍攝圖像,計算同一物體在兩個畫面中的像素位置差異,再基于三角測量原理精確推算出目標物體與車輛之間的距離。這種技術路徑不依賴于深度學習算法的“猜測”,而是基于嚴密的幾何物理原理直接獲取三維空間信息,為車輛決策系統提供至關重要的深度數據。
攻堅克難:立體視覺的實戰突破
隨著中國高階輔助駕駛的高速發展和應用普及,多起因未能識別靜止障礙物從而引發車輛交通事故的案例頻現——感知系統在復雜場景下的局限性、車企宣傳邊界的模糊、用戶認知偏差等問題日益凸顯。結合本次擬新出臺的組合輔助駕駛法規,兩大場景成為檢驗技術短板的典型試驗場:
一、靜態目標識別困境:
毫米波雷達難以區分靜止車輛與路標、護欄,傳統視覺系統在逆光、隧道進出等高動態光照場景下細節丟失嚴重。
1.1直道側翻車輛:隧道內外的視覺挑戰
工況難點剖析:
當車輛在隧道外正常行駛,突然發現隧道內有一輛側翻的靜止車輛時,這一場景集齊了智能駕駛感知系統的兩大挑戰:
① 目標特性挑戰:
? 側翻車輛呈現非常規姿態,車身形態與訓練數據中的正常車輛差異顯著,傳統基于圖像識別的單目系統極易將其誤判為“未知障礙物”甚至漏檢。
② 環境過渡挑戰:
? 隧道內外存在巨大光照差異,攝像頭從明亮環境進入相對黑暗的隧道時,需要快速適應光線變化,此過程中圖像可能出現短暫過曝或欠曝,導致關鍵細節丟失。
立體視覺解決方案:
① 非標障礙物的感知優勢:
? 立體視覺系統不依賴預先訓練的物體模型,而是直接通過視差計算獲取三維點云數據。基于語義信息與點云融合的結構化數據,系統可對三維空間內任意目標實現感知和測量,對于側翻的車輛、路障、路面遺撒物等非標準障礙物都具有普遍的檢出能力和較高的測量準確性。這種基于物理的空間感知能力,使立體視覺在應對各類非標準障礙物時具有獨特優勢。
② 高動態場景的雙重保障:
? 現有中科慧眼前視8M立體相機采用OX08D10傳感器,集合大井深(DCG)與高密度電容器(LOFIC),可以實現最高140dB動態范圍成像,有效克服敏感差異導致的局部細節信息損失,同時捕捉隧道外強光區域和隧道內暗部細節。
? 系統將立體點云數據與語義信息融合,即使在圖像質量短暫下降時,也能依靠點云的空間連續性維持障礙物跟蹤能力。
二、非標準障礙物檢測盲區:
側翻車輛、施工區域水馬等異形物體缺乏標準特征,傳統單目視覺依賴預設模型,泛化能力不足。
2.1 施工區域探測:復雜環境中的空間認知
工況難點剖析:
施工區域探測面臨中國道路特有的復雜性。
① 環境復雜性:
? 施工警示標識形態多樣(交通錐、水馬、防撞桶),擺放位置隨機,且常與復雜背景(如路旁堆積物、臨時圍擋)混雜,單一傳感器極易出現漏檢或誤報。
交通錐且有干擾車
隔離墩(水馬)
防撞桶
紙箱等遺撒物
② 決策多維性
? 僅識別障礙物并不足夠,系統還需準確測量可通行空間的寬度和高度,判斷車輛是否能夠安全通過狹窄通道。
③ 典型事故場景:
? 在雙向四車道的長直道,車輛前進方向有成排隔離墩/水馬/護欄封路,隔離墩斜列放置角度與車道中心線夾角為45 ° , 占據本車道方向兩條車道,且繼續延伸至對向車道內側車道的內側車道邊線。
施工區典型事故場景
? 當車輛檢測到前方施工改道路障后觸發減速提醒,但因未能順利改道繼而失控撞擊隔離帶,導致車輛事故。
立體視覺解決方案:
① 非標準障礙物的精準三維測量:
? 基于立體相機的點云密度,可以更早的對目標障礙物實現感知和測量。原則上非標準障礙物大部分是靜止的目標(如路障、遺撒物等),因此在行車過程中,越早檢測到目標物體,可以更早的啟動針對性的規避方案(剎車或避讓);也更加有助于整車的規控策略,實現減速或者更加平滑的變道。
城區等復雜工況下點云效果
(柵欄/二輪車/三輪車/行人)
? 立體視覺的核心優勢在于能對視野內任意可見目標進行三維測量,不受目標類別是否預定義的局限。無論是標準的交通錐,還是臨時擺放的非標準障礙物(如施工材料堆、特殊形狀的警示牌等),只要在視覺上具有可辨識的紋理特征,系統就能建立其三維點云模型,精確測量其空間位置和物理尺寸。
② 3D可通行區域的智能判斷:
? 立體視覺系統通過生成密集視差圖,構建車輛前方環境的三維數字高程模型,可對3D空間內的任意目標都實現測量,在此基礎上結合圖像語義信息,系統可實現以下功能:
? 精確計算施工區域形成的通道寬度,并與自車寬度+安全余量進行比對,通過生成密集視差圖,構建車輛前方環境的三維數字高程模型;
典型交通非標準障礙物場景
(交通錐/水馬/防撞桶/消防栓/矮墻)
? 檢測地面上的潛在危險物(如散落的碎石、低矮路緣石等),這些目標往往低于傳統雷達的有效探測高度;
? 結合車輛運動軌跡預測,判斷當前車速下能否安全通過限制區域。
安全普惠的深度之眼
在中國智能駕駛從“高端嘗鮮”邁向“全民標配”的進程中,立體視覺技術以其獨特的物理測距能力、對非標準障礙物的適應性以及出色的成本效益比,正成為破解復雜長尾場景的關鍵工具。從隧道內側翻車輛的精準識別,到施工區域可通行空間的智能判斷,立體視覺賦予車輛真實的三維空間認知能力,使智能駕駛系統能夠應對中國道路特有的復雜性和不確定性。
隨著算法持續優化、硬件成本進一步下探,以及中國智能駕駛生態的深度整合,立體視覺有望在15萬元以下主流車型中率先實現大規模應用。據麥肯錫預測,到2028年,中國智能駕駛軟硬件市場規模將突破萬億元,其中70%的增長將來自15萬元以下市場。在這一歷史性進程中,立體視覺不僅是一項技術選擇,更是實現智能駕駛安全普及與技術普惠的重要路徑,讓每一輛普通家用車都能擁有感知三維世界的“深度之眼”,真正實現“看得見、看得懂”的安全智駕體驗。
-
智能駕駛
+關注
關注
4文章
2816瀏覽量
49994 -
立體視覺
+關注
關注
0文章
39瀏覽量
9945 -
中科慧眼
+關注
關注
0文章
48瀏覽量
289
原文標題:立體視覺:智能駕駛的“三維之眼”與復雜場景破解之道
文章出處:【微信號:zhaoyaomojingdyh,微信公眾號:中科慧眼】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
Bumblebee X 5GigE系列工業相機,多場景下釋放工業立體視覺的無限潛力!

雙目視覺在智能駕駛領域的應用
智能軟件+硬件解決方案克服實時立體視覺中的挑戰

中科慧眼三目立體視覺相機將亮相2025上海車展
中科慧眼與為旌科技簽署戰略合作協議
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
立體視覺新手必看:英特爾? 實感? D421深度相機模組
特斯拉智能駕駛|從視覺優先的技術路徑到未來的挑戰?





 工商網監
工商網監
評論