") 一文解析CA500伺服系統(tǒng)在數(shù)控折彎機上的應用
一文解析CA500伺服系統(tǒng)在數(shù)控折彎機上的應用
傳統(tǒng)的數(shù)控折彎機液壓系統(tǒng)多采用普通三相異步電機驅動油泵,能耗大、溫升高、效率低、部件易損壞。隨著節(jié)能減排日益受到重視,使用電液伺服系統(tǒng)驅動油泵的新型數(shù)控折彎機應運而生。本文擬結合四方CA500伺服驅動器搭配CM500伺服電機,介紹一種針對數(shù)控折彎機液壓系統(tǒng)的電液伺服調速方案,有效降低系統(tǒng)能耗及液壓油的溫升,同時提高了設備運行可靠性。
電液伺服系統(tǒng)的特點
電液伺服系統(tǒng)是指以伺服元件(伺服閥或伺服泵)為控制核心的液壓控制系統(tǒng),它通常由指令裝置、控制器、放大器、液壓源、伺服元件、執(zhí)行元件、反饋傳感器及負載組成。
(1)伺服系統(tǒng)是一個位置跟蹤系統(tǒng)。輸出位移自動地跟隨輸入位移的變化規(guī)律而變化,體現(xiàn)為位置跟隨運動。
(2)伺服系統(tǒng)是一個功率放大系統(tǒng)。推動滑閥閥芯所需的功率很小,而系統(tǒng)的輸出功率卻可以很大,可帶動較大的負載運動。
(3)伺服系統(tǒng)是一個負反饋系統(tǒng)。輸出位移之所以能夠精確地復現(xiàn)輸入位移的變化。是因為控制滑閥的閥體和液壓缸體固連在一起,構成了一個負反饋控制通路。液壓缸輸出位移,通過這個反饋通路回輸給滑閥閥體,并與輸入位移相比較。從而逐漸減小和消除輸出位移和輸入位移之間的偏差,直到兩者相同為止。因此負反饋環(huán)節(jié)是液壓伺服系統(tǒng)中必不可少的重要環(huán)節(jié)。負反饋也是自動控制系統(tǒng)具有的主要特征。
電液伺服系統(tǒng)工作原理
電液伺服系統(tǒng)是一個有誤差系統(tǒng)。當液壓缸位移和閥芯位移之間不存在偏差時,系統(tǒng)就處于靜止狀態(tài)。由此可見,若使液壓缸克服工作阻力并以一定的速度運動,首先必須保證滑閥有一定的閥口開度,這就是電液伺服系統(tǒng)工作的必要條件。液壓缸運動的結果總是力圖減少這個誤差,但在其工作的任何時刻也不可能完全消除這個誤差。沒有誤差,伺服系統(tǒng)就不能工作。
電液伺服系統(tǒng)的基本原理是:反饋信號與輸入信號相比較得出偏差信號,利用該偏差信號控制液壓能源輸入到系統(tǒng)的能量,使系統(tǒng)向著減小偏差的方向變化,直至偏差等于零或足夠小,從而使系統(tǒng)的實際輸出與希望值相符。
CA500伺服系統(tǒng)在數(shù)控折彎機上的應用
一、工藝簡介
數(shù)控折彎機的一個工作循環(huán)可分為快下、慢下、保壓、卸荷、返程這幾個狀態(tài)。設備工作時,系統(tǒng)控制油泵運轉,并配合液壓油路控制單元的工作,從而控制液壓系統(tǒng)的流量,達到各工作狀態(tài)下的合理壓力值。其具體工作流程如下:
機器滑塊快速下行時,壓力油通過液壓閥組進入油缸上腔,油缸下腔的油液經液壓閥組返回到液壓泵中,機器的滑塊因自重快速下降,被打開的充液閥對油缸上腔進行充液;機器滑塊低速工進時,壓力油通過液壓閥組流入油缸上腔繼續(xù)推動滑塊下降;當機器滑塊返程時,壓力油經液壓閥組進入油缸下腔,油缸活塞桿拉動滑塊上升,油缸上腔油液通過打開的充液閥流回油箱,至此完成一次工作循環(huán)。
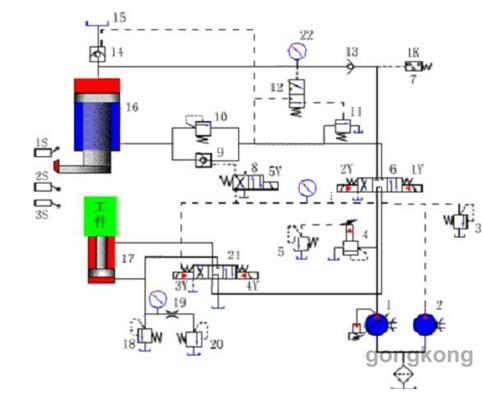
圖一、數(shù)控折彎機液壓原理圖
二、系統(tǒng)方案
傳統(tǒng)折彎機的液壓系統(tǒng)通過定量泵和比例換向閥來調節(jié)系統(tǒng)的流量,由于系統(tǒng)需要的實際流量是變化的,而油泵輸出流量是恒定的,因此必定有一部分流量需要溢流,產生能量損失;另一方面,閥控液壓系統(tǒng)的設定壓力總是要高于實際需要的壓力,這也造成了能量的損失。同時節(jié)流調速方式存在主壓力閥溢流,造成噪音及液壓油的發(fā)熱量較大,溫升較高,降低了液壓油的使用壽命,增加了維護成本。
針對傳統(tǒng)折彎機液壓系統(tǒng)的缺點,以及設備的成型工序、工藝特點,設計了采用四方CA500伺服驅動器、CM500伺服電機以及齒輪泵來調節(jié)液壓系統(tǒng)流量及壓力的控制系統(tǒng)。
具體系統(tǒng)方案如下:
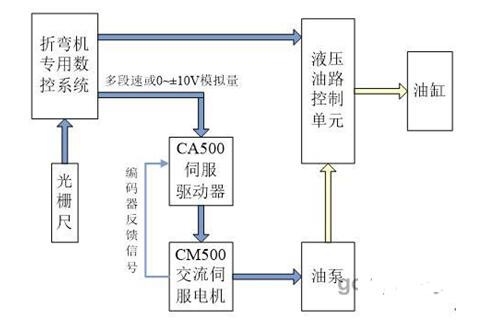
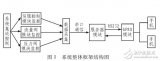
圖二、系統(tǒng)方案圖
數(shù)控系統(tǒng)根據(jù)光柵尺的位置反饋經由特點算法得出系統(tǒng)所需流量、壓力大小,對應輸出0~±10V模擬量控制信號給到CA500,實時調整油泵的轉速,并配合液壓油路控制單元的工作,滿足不同工序端的壓力及流量需求。
方案采用容積調速的原理,通過調節(jié)伺服電機的轉速來改變油泵的流量及系統(tǒng)壓力,避免了傳統(tǒng)節(jié)流調速方案所造成的能量損耗,特別是在保壓和卸荷階段,油液的輸出很小,油泵幾乎可以停止運轉,極大程度減少了能量損耗。同時伺服驅動系統(tǒng)的響應時間更短,設備工作時快下和返程速度更快,效率更高。
三、系統(tǒng)配線方案及說明
1、 電氣接線圖如下:
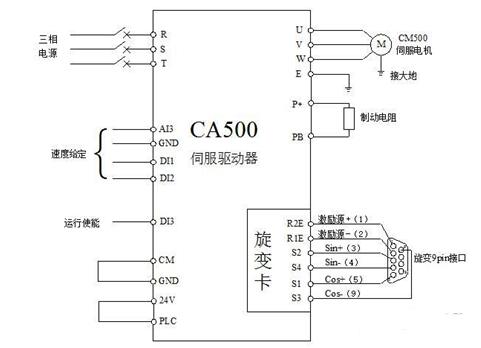
圖三、電氣接線圖
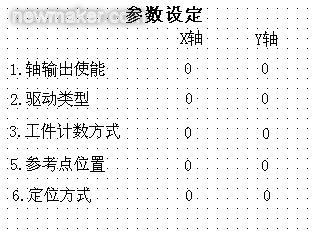
2、主要設定參數(shù):

3、方案優(yōu)勢:
※ CA500伺服驅動器采用重載型設計,低頻轉矩大,動態(tài)響應快,過載能力強,可120%負載長期運行;
※ CM500伺服電機采用高性能稀土永磁材料,抗去磁能力強。電機轉子采用特殊結構和工藝,外殼防護等級為IP54,絕緣等級為F級,保證系統(tǒng)運行的可靠性;
※ 泵控技術代替常規(guī)閥控技術,消除節(jié)流損耗,節(jié)能效果顯著,節(jié)能率可達25%。
※ 降低了液壓油的溫升,延長了液壓油的使用壽命,減少系統(tǒng)維護成本;
※ 折彎機快下、慢下、保壓、卸荷、返程各工序段運行時噪音明顯下降,改善工作環(huán)境;
※ 簡化的調試功能(四方電機免調試),最大程度減少客戶調試參數(shù),安裝使用方便。
四、小結
本文介紹了一種基于四方CA500系列伺服驅動器和CM500伺服電機的數(shù)控折彎機電液伺服方案。該方案有效降低了系統(tǒng)能耗,運行噪音小、系統(tǒng)響應快,提高了效率,且運行穩(wěn)定可靠,保護功能強大,操作簡單方便。既能夠滿足折彎機成型工藝要求,提高產品質量和產量,又減少了設備維護費用,為用戶創(chuàng)造了良好的經濟效益,目前已批量應用于多個數(shù)控折彎機伺服系統(tǒng)。
-
伺服系統(tǒng)
+關注
關注
14文章
584瀏覽量
39961
發(fā)布評論請先 登錄
PSO算法在數(shù)控機床交流伺服系統(tǒng)PID參數(shù)優(yōu)化中的應用
DM51 DELEM折彎機數(shù)控系統(tǒng)
數(shù)控機床的伺服系統(tǒng)
數(shù)控機床的伺服系統(tǒng)
進給伺服系統(tǒng)
PSO算法在數(shù)控機床交流伺服系統(tǒng)PID參數(shù)優(yōu)化中的應用
PSO算法在數(shù)控機床交流伺服系統(tǒng)PID參數(shù)優(yōu)化中的應用
信捷產品在折彎機系統(tǒng)中的應用
折彎機遠程監(jiān)控系統(tǒng)





 工商網監(jiān)
工商網監(jiān)
評論