") 伺服系統(tǒng)復(fù)合控制技術(shù)和非線(xiàn)性補(bǔ)償技術(shù)
伺服系統(tǒng)復(fù)合控制技術(shù)和非線(xiàn)性補(bǔ)償技術(shù)
本文首先介紹了伺服系統(tǒng)技術(shù)的要求,其次闡述了伺服系統(tǒng)復(fù)合控制技術(shù)和非線(xiàn)性補(bǔ)償技術(shù),最后介紹了伺服系統(tǒng)常用的線(xiàn)性補(bǔ)償,具體的跟隨小編一起來(lái)了解一下。
伺服系統(tǒng)技術(shù)的要求
1、系統(tǒng)精度
伺服系統(tǒng)精度指的是輸出量復(fù)現(xiàn)輸入信號(hào)要求的精確程度,以誤差的形式表現(xiàn),可概括為動(dòng)態(tài)誤差、穩(wěn)態(tài)誤差和靜態(tài)誤差三個(gè)方面組成。
2、穩(wěn)定性
伺服系統(tǒng)的穩(wěn)定性是指當(dāng)作用在系統(tǒng)上的干擾消失以后,系統(tǒng)能夠恢復(fù)到原來(lái)穩(wěn)定狀態(tài)的能力;或者當(dāng)給系統(tǒng)一個(gè)新的輸入指令后,系統(tǒng)達(dá)到新的穩(wěn)定運(yùn)行狀態(tài)的能力。
3、響應(yīng)特性
響應(yīng)特性指的是輸出量跟隨輸入指令變化的反應(yīng)速度,決定了系統(tǒng)的工作效率。響應(yīng)速度與許多因素有關(guān),如計(jì)算機(jī)的運(yùn)行速度、運(yùn)動(dòng)系統(tǒng)的阻尼和質(zhì)量等。
4、工作頻率
工作頻率通常是指系統(tǒng)允許輸入信號(hào)的頻率范圍。當(dāng)工作頻率信號(hào)輸入時(shí),系統(tǒng)能夠按技術(shù)要求正常工作;而其它頻率信號(hào)輸入時(shí),系統(tǒng)不能正常工作。
伺服系統(tǒng)復(fù)合控制技術(shù)和非線(xiàn)性補(bǔ)償技術(shù)
一、復(fù)合控制技術(shù)
1、擾動(dòng)補(bǔ)償?shù)牟蛔冃栽?/p>
控制系統(tǒng)工作時(shí),除有控制輸人外,常有擾動(dòng)作用于系統(tǒng),為使系統(tǒng)輸出精確地復(fù)現(xiàn)輸人,必須對(duì)擾動(dòng)進(jìn)行補(bǔ)償,為此有人曾提出了擾動(dòng)補(bǔ)償?shù)摹安蛔冃栽怼薄?/p>
2、復(fù)合控制伺服系統(tǒng)
在按誤差控制的基礎(chǔ)上,再引入前饋補(bǔ)償通道(亦稱(chēng)擾動(dòng)控制),即構(gòu)成復(fù)合控制系統(tǒng),亦稱(chēng)開(kāi)環(huán)一閉環(huán)控制系統(tǒng)。
3、模型跟蹤控制系統(tǒng)
模型跟蹤控制系統(tǒng)看作是復(fù)合控制的一種形式。
二、非線(xiàn)性補(bǔ)償技術(shù)
僅依賴(lài)線(xiàn)性補(bǔ)償技術(shù),有時(shí)難以達(dá)到用戶(hù)對(duì)伺服系統(tǒng)品質(zhì)的要求,因而在伺服系統(tǒng)中采用非戔性補(bǔ)償技術(shù)、多模控制技術(shù)日益增多。
延伸閱讀:伺服系統(tǒng)常用的線(xiàn)性補(bǔ)償
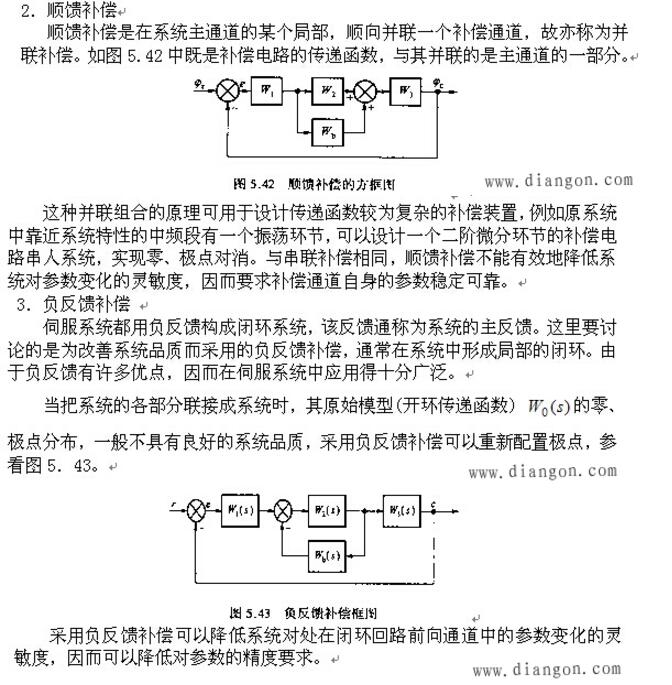
在伺服系統(tǒng)中常用具有線(xiàn)性特性的補(bǔ)償裝置(通常是補(bǔ)償電路),采取串聯(lián)、順饋(或稱(chēng)并聯(lián))、負(fù)反饋、正反饋,以及它們的組合形式,來(lái)改善系統(tǒng)的特性,提高系統(tǒng)的工作品質(zhì)。下面分別介紹各種補(bǔ)償聯(lián)接形式的特點(diǎn)及有關(guān)注意事項(xiàng)。
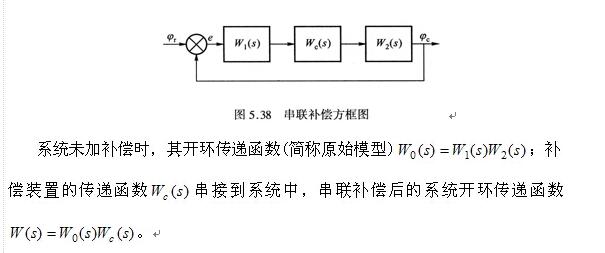
1、串聯(lián)補(bǔ)償
串聯(lián)補(bǔ)償是指在系統(tǒng)主通道(即前向通道)中串接人適當(dāng)?shù)难a(bǔ)償裝置(電路)。如圖所示。
常用的串聯(lián)補(bǔ)償裝置均由電路組成,有僅用R、L、C組成的無(wú)源補(bǔ)償網(wǎng)絡(luò)。有利用線(xiàn)性集成放大器組成的有源補(bǔ)償網(wǎng)絡(luò),它們所能傳遞的都是直流信號(hào),因此只有串聯(lián)在系統(tǒng)線(xiàn)路中傳遞直流信號(hào)的部位,才能起到相應(yīng)的作用。如果系統(tǒng)中傳遞的是固定頻率的交流載頻信號(hào),則無(wú)法使用以上兩類(lèi)補(bǔ)償網(wǎng)絡(luò)。
常用的補(bǔ)償網(wǎng)絡(luò),在工程上實(shí)用的還有許多形式。作為系統(tǒng)的串聯(lián)補(bǔ)償,它們中的一些是不能用的,因?yàn)樵谙到y(tǒng)的主通道中,不能串聯(lián)含有純微分環(huán)節(jié)的電路(即不串聯(lián)含有s=0的零點(diǎn)的網(wǎng)絡(luò)),它將阻斷恒定信號(hào)的有效傳遞,使伺服系統(tǒng)不能有效地工作。
為了提高系統(tǒng)的穩(wěn)態(tài)精度,常采取提高系統(tǒng)的型(即無(wú)差度)的辦法,這就要求在系統(tǒng)的前向主通道中串入積分環(huán)節(jié),或者串聯(lián)PI調(diào)節(jié)器。
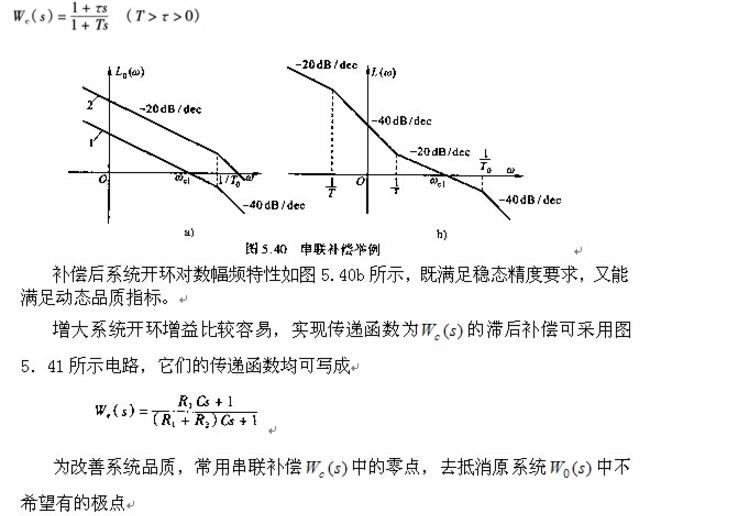
倘若系統(tǒng)開(kāi)環(huán)對(duì)數(shù)幅頻特性(系統(tǒng)是最小相位系統(tǒng))如圖5.40a中曲線(xiàn)1所示。在零初始條件下,系統(tǒng)對(duì)輸入階躍信號(hào)的響應(yīng)能滿(mǎn)足動(dòng)態(tài)品質(zhì)要求,但系統(tǒng)的穩(wěn)態(tài)精度不高;為提高系統(tǒng)穩(wěn)態(tài)精度需增大系統(tǒng)開(kāi)環(huán)增益,系統(tǒng)開(kāi)環(huán)對(duì)數(shù)幅頻特性如圖a中曲線(xiàn)2所示,但此時(shí)系統(tǒng)的動(dòng)態(tài)品質(zhì)不滿(mǎn)足要求。在增大系統(tǒng)開(kāi)環(huán)增益的同時(shí),串接一個(gè)滯后補(bǔ)償
-
伺服系統(tǒng)
+關(guān)注
關(guān)注
14文章
584瀏覽量
40019
發(fā)布評(píng)論請(qǐng)先 登錄
一種基于滑模控制和擾動(dòng)補(bǔ)償技術(shù)的永磁同步電機(jī)伺服系統(tǒng)非線(xiàn)性速度控制算法
基于微粒子群算法的Anti-Windup伺服系統(tǒng)速度控制器優(yōu)
電機(jī)智能化與精準(zhǔn)控制伺服系統(tǒng)研究

伺服系統(tǒng)的PID控制技術(shù)下載
轉(zhuǎn)臺(tái)伺服系統(tǒng)模糊PID復(fù)合控制算法
交流永磁伺服系統(tǒng)技術(shù)講座
伺服系統(tǒng)的線(xiàn)性補(bǔ)償與伺服系統(tǒng)的測(cè)速測(cè)角

基于帶修正因子模糊PID控制的PMSM交流伺服系統(tǒng)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論