") 自動化設(shè)備設(shè)計中如何選擇伺服電機(jī)(應(yīng)用場景/供電電源/抱閘/參數(shù))
自動化設(shè)備設(shè)計中如何選擇伺服電機(jī)(應(yīng)用場景/供電電源/抱閘/參數(shù))
自動化領(lǐng)域指如今的大熱門,而伺服電機(jī)在其中占有重要地位,通常用于項目中較精確的速度或位置控制部件的驅(qū)動。自動化設(shè)備的設(shè)計者常常需要面臨各種各樣不同需求的電機(jī)選型問題。本文首先介紹了伺服電機(jī)的選型步驟及原則,其次闡述了如何給自動化設(shè)備設(shè)計選擇伺服電機(jī),最后介紹了伺服電機(jī)的選型注意事項,具體的跟隨小編一起來了解一下。
伺服電機(jī)的選型步驟
(1)明確負(fù)載機(jī)構(gòu)的運動條件要求,即加/減速的快慢、運動速度、機(jī)構(gòu)的重量、機(jī)構(gòu)的運動方式等。
(2)依據(jù)運行條件要求選用合適的負(fù)載慣量計算公式計算出機(jī)構(gòu)的負(fù)載慣量。
(3)依據(jù)負(fù)載慣量與伺服電機(jī)慣量選出適當(dāng)?shù)募龠x定伺服電機(jī)規(guī)格。
(4)結(jié)合初選的伺服電機(jī)慣量與負(fù)載慣量,計算出加速轉(zhuǎn)矩及減速轉(zhuǎn)矩。
(5)依據(jù)負(fù)載重量、配置方式、摩擦系數(shù)、運行效效率計算出負(fù)載轉(zhuǎn)矩。
(6)初選伺服電機(jī)的最大輸出轉(zhuǎn)矩必須大于加速轉(zhuǎn)矩+負(fù)載轉(zhuǎn)矩;如不符合條件,必須選用其他型號計算驗證直至符符合要求。
(7)依據(jù)負(fù)載轉(zhuǎn)矩、加速轉(zhuǎn)矩、減速轉(zhuǎn)矩及保持轉(zhuǎn)矩計算出連續(xù)瞬時轉(zhuǎn)矩。
(8)初選伺服電機(jī)的額定轉(zhuǎn)矩必須大于連續(xù)瞬時轉(zhuǎn)矩,如,如果不符合條件,必須選用其他型號計算驗證直至符合要求。
(9)完成選定。
伺服電機(jī)的選型原則
1、根據(jù)運行要求選擇負(fù)載慣量計算公式,計算機(jī)構(gòu)的負(fù)載慣量。
2、通常,明確負(fù)載機(jī)構(gòu)的運動條件要求,即加減速度、運行速度、重量、運行方式等,這是選擇伺服規(guī)格的必要。
3、負(fù)載重量、配置方式、摩擦系數(shù)來計算負(fù)載轉(zhuǎn)矩。
4、負(fù)載慣量和伺服電機(jī)慣量也是選擇電機(jī)規(guī)格的必要考慮因素,用戶可以根據(jù)兩者計算出加速轉(zhuǎn)矩及減速轉(zhuǎn)矩,并選擇行當(dāng)?shù)募龠x定規(guī)格。
5、負(fù)載轉(zhuǎn)矩、加減速轉(zhuǎn)矩、保持轉(zhuǎn)矩,計算連續(xù)瞬時轉(zhuǎn)矩。連續(xù)瞬時轉(zhuǎn)矩一定要小于初選伺服電機(jī)額定轉(zhuǎn)矩,否則只能選擇其他符合條件的規(guī)格。
6、注意 加速轉(zhuǎn)矩+負(fù)載轉(zhuǎn)矩〈初選伺服的最大輸出轉(zhuǎn)矩
自動化設(shè)備設(shè)計中如何選擇伺服電機(jī)
1、應(yīng)用場景
自動化領(lǐng)域的控制型電機(jī)可分為伺服電機(jī)、步進(jìn)電機(jī)、變頻電機(jī)等。在需要較為精確的速度或位置控制的部件,會選擇伺服電機(jī)驅(qū)動。
變頻器+變頻電機(jī)的控制方式,是通過改變輸入電機(jī)的電源頻率而改變電機(jī)轉(zhuǎn)速的控制方法。一般只用于電機(jī)的調(diào)速控制。
伺服電機(jī)與步進(jìn)電機(jī)相比:
a)伺服電機(jī)使用閉環(huán)控制,步進(jìn)電機(jī)為開環(huán)控制;
b)伺服電機(jī)使用旋轉(zhuǎn)編碼器計量精度,步進(jìn)電機(jī)使用步距角。普通產(chǎn)品級別上前者的精度可達(dá)后者的百倍數(shù)量級;
c)控制方式相似(脈沖或方向信號)。
2、供電電源
伺服電機(jī)從供電電源上區(qū)分可分為交流伺服電機(jī)和直流伺服電機(jī)。
二者還是比較好選擇的。一般的自動化設(shè)備,甲方都會提供標(biāo)準(zhǔn)的380V工業(yè)電源或220V電源,此時選擇對應(yīng)電源的伺服電機(jī)即可,免去電源類型的轉(zhuǎn)換。但有一些設(shè)備,比如立體倉庫中的穿梭板、AGV小車等,由于本身的移動性質(zhì),大部分使用自帶直流電源,所以一般使用直流伺服電機(jī)。
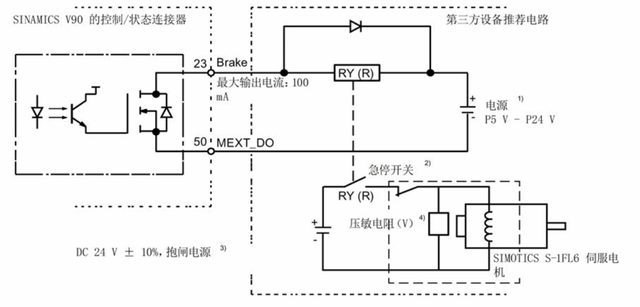
3、抱閘
根據(jù)動作機(jī)構(gòu)的設(shè)計,考慮在停電狀態(tài)下或靜止?fàn)顟B(tài)下,是否會造成對電機(jī)的反轉(zhuǎn)趨勢。如果有反轉(zhuǎn)趨勢,就需要選擇帶抱閘的伺服電機(jī)。
4、選型計算
選型計算前,首先要確定的是機(jī)構(gòu)末端的位置和速度要求,再者確定傳動機(jī)構(gòu)。此時即可選擇伺服系統(tǒng)和對應(yīng)的減速器。
選型過程中,主要考慮以下參數(shù):
4.1、功率和速度
根據(jù)結(jié)構(gòu)形式和最終負(fù)載的速度和加速度要求,計算電機(jī)所需功率和速度。值得注意的是,通常情況下需要結(jié)合所選電機(jī)的速度選取減速機(jī)的減速比。
在實際選型過程中,比如負(fù)載為水平運動,因為各個傳動機(jī)構(gòu)的摩擦系數(shù)和風(fēng)載系數(shù)的不確定性,公式P=T*N/9549往往無法明確計算(無法精確計算扭矩的大小)。而在實踐過程中,也發(fā)現(xiàn)使用伺服電機(jī)所需功率最大處往往是加減速階段。所以,通過T=F*R=m*a*R可定量計算所需電機(jī)的功率大小和減速機(jī)的減速比(m:負(fù)載質(zhì)量;a:負(fù)載加速度;R:負(fù)載旋轉(zhuǎn)半徑)。
有以下幾點需要注意:
a)電機(jī)的功率富余系數(shù);
b)考慮機(jī)構(gòu)的傳動效率;
c)減速機(jī)的輸入和輸出扭矩是否達(dá)標(biāo),并有一定的安全系數(shù);
d)后期是否會有加大速度的可能性。
值得一提的是,在傳統(tǒng)行業(yè)中,例如起重機(jī)等行業(yè),使用普通的感應(yīng)電機(jī)驅(qū)動,加速度無明確要求,計算過程使用的是經(jīng)驗公式。
注:負(fù)載垂直運行的情況下,注意把重力加速度計算在內(nèi)。
4.2、慣量匹配
要實現(xiàn)對負(fù)載的高精度控制,需要考慮電機(jī)與系統(tǒng)的慣量是否匹配。
對于為什么需要慣量匹配的問題,網(wǎng)上并沒有給出一統(tǒng)江湖的說法。個人理解有限,在這里就不解釋了。有興趣的朋友可以自行考證一下并告知一聲。慣量匹配的原則為:考慮系統(tǒng)慣量折合到電機(jī)軸上,與電機(jī)的慣量比不大于10(西門子);比值越小,控制穩(wěn)定性越好,但需要更大的電機(jī),性價比更低。具體的計算方法如有不明白的請自行補(bǔ)學(xué)大學(xué)“理論力學(xué)”。
4.3、精度要求
計算經(jīng)過減速機(jī)和傳動機(jī)構(gòu)的變化后,電機(jī)的控制精度是否能夠滿足負(fù)載的要求。減速器或某些傳動機(jī)構(gòu)有一定的回程間隙,都需要考慮。
4.4、控制匹配
這個方面主要是與電氣設(shè)計人員溝通確認(rèn),比如伺服控制器的通訊方式是否與PLC匹配,編碼器類型及是否需要引出數(shù)據(jù)等。
值得一提的是,做自動化的設(shè)計,要學(xué)會借外力。特別是做非標(biāo)自動化,面臨太多設(shè)備的選型和計算,往往不堪重負(fù),加班累成狗是常態(tài)。現(xiàn)在伺服電機(jī)廠商都會提供技術(shù)支持,只要你提供給他負(fù)載、速度、加速度等參數(shù)要求,他們有一套自己的軟件自動幫助你計算并選擇合適的伺服電機(jī),非常的方便。
伺服電機(jī)選型的注意事項
1、有些系統(tǒng)如傳送裝置,升降裝置等要求伺服電機(jī)能盡快停車,而在故障、急停、電源斷電時伺服器沒有再生制動,無法對電機(jī)減速。同時系統(tǒng)的機(jī)械慣量又較大,這時對動態(tài)制動器的要依據(jù)負(fù)載的輕重、電機(jī)的工作速度等進(jìn)行選擇。
2、有些系統(tǒng)要維持機(jī)械裝置的靜止位置,需電機(jī)提供較大的輸出轉(zhuǎn)矩,且停止的時間較長。如果使用伺服的自鎖功能,往往會造成電機(jī)過熱或放大器過載,這種情況就要選擇帶電磁制動的電機(jī)。
3、有的伺服驅(qū)動器有內(nèi)置的再生制動單元,但當(dāng)再生制動較頻繁時,可能引起直流母線電壓過高,這時需另配再生制動電阻。再生制動電阻是否需要另配,配多大,可參照相應(yīng)樣本的使用說明來配。
4、如果選擇了帶電磁制動器的伺服電機(jī),電機(jī)的轉(zhuǎn)動慣量會增大,計算轉(zhuǎn)矩時要進(jìn)行考慮。
-
伺服電機(jī)
+關(guān)注
關(guān)注
87文章
2105瀏覽量
59208 -
自動化設(shè)備
+關(guān)注
關(guān)注
1文章
465瀏覽量
17262
發(fā)布評論請先 登錄
電源自動測試系統(tǒng)的技術(shù)原理和應(yīng)用場景
模塊化儀器的技術(shù)原理和應(yīng)用場景
如何選擇適合的伺服電機(jī)
資料下載:FA 工業(yè)自動化設(shè)備設(shè)計基礎(chǔ)
自動化設(shè)備的伺服電機(jī)應(yīng)該如何選擇
抱閘式伺服電機(jī)與普通伺服電機(jī)的區(qū)別
抱閘伺服電機(jī)和普通伺服電機(jī)究竟有何區(qū)別?
伺服電機(jī)抱閘系統(tǒng)概述
如何在直流供電下使用交流同步伺服電機(jī)?
自動化物流運輸設(shè)備模組要選擇哪種類型?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論