 智能制造工業機器人技術發展趨勢
智能制造工業機器人技術發展趨勢

(一)大范圍動態場景理解
工業機器人在自主制造場景中,對環境和運行狀態感知要求高,作業環境多變、狀態難測。需構建動態語義地圖,解決機器人精細化路徑規劃、協同作業控制難題,實時感知機器人與工件信息以全面監控制造狀態。
長期以來,大型部件制造信息感知多依賴人工,多機器人視覺感知系統應用后,人為干涉多、自主性低、協同弱的問題仍未有效改善。面向大型復雜部件制造的多機器人智能感知與認知研究剛起步,多模態感知理論體系亟待完善。針對復雜工業動態場景的大范圍場景感知與理解,是未來重要發展方向。
(二)集群化作業
智能制造關鍵在于機器設備互聯、互通、互融,集群機器人協同作業為高效協同、自主組織等智能制造理論與技術提供關鍵支撐。
集群機器人系統由多個單體機器人組成,通過信息交互等構建行為協同與自主決策能力,適應復雜作業任務。與單體機器人相比,它能重塑大型復雜構件制造過程,執行難以完成的制造與檢測任務,支撐提質、增效、降本和柔性生產。智能化集群機器人制造是重大裝備制造的有效形式和發展趨勢。
(三)柔性作業
目前工業機器人作業調試多采用人工示教方式。高端裝備關鍵核心部件結構復雜、質量要求高、批量小、型號多,機器人定制化調試模式難以勝任。
智能制造工業機器人需適應小批量、多品種生產模式,增強生產線智能性和靈活性。執行接觸型作業時,機器人要準確跟蹤軌跡,控制末端執行器與工件的位姿和接觸力。人工操作在智慧性等方面有優勢,工業機器人需在保持自身強項的同時增強柔性作業能力。配置功能增強型傳感器和末端執行器,提升操控性能,是重要發展方向。
(四)具身智能
工業制造模式轉向小批量、多品種柔性離散作業,制造場景、環境和任務存在不確定性。常規工業機器人感知與作業能力有限,難以適應復雜環境。
具身智能是 AI 技術重要分支,是工業機器人新興研究方向。具身智能機器人能理解自然語言、感知環境、自主規劃任務并與環境交互,突出與環境的強關聯和交互,可更好應對柔性離散制造環境。相關技術涉及多模態感知系統等,在智能制造技術體系中的地位不斷提升。
(五)網絡化協同
工業機器人系統有序執行智能制造作業,需機器人個體間通信與計算支持。云計算、邊緣計算等信息技術發展迅速,相關部署架構及平臺集成異構信息互通與計算力分配功能,克服單個設備局限,是解決機器人通信計算融合問題的有力依托(見圖 3)。
“云邊融合”作業模式集成多種傳感器信息,深度感知生產實體特性與狀態,實時動態進行數據交換、計算分配和任務分發,延伸至智能制造設備,驅動機器人與其他設備高效共享資源,支持制造系統網絡化、智能化和多設備協同。構建高效安全的集群機器人通信計算一體化網絡架構,保障機器人間低時延、高安全網絡傳輸及計算分配,是未來重點發展方向。
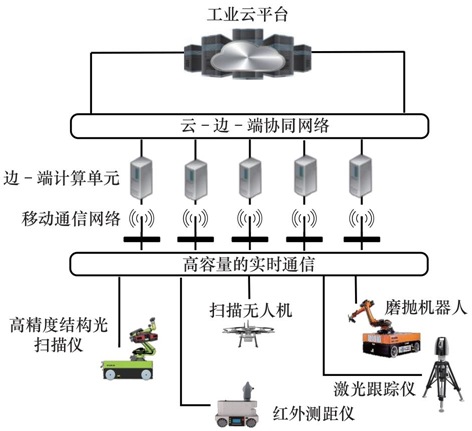
云 - 邊 - 端協同的智能制造集群機器人作業架構
(六)數字孿生
數字孿生以數字化方式創建實體虛擬模型,模擬物理實體在現實環境中的變化。對于智能制造工業機器人,基于數字孿生技術開展虛實交互等活動,可增強系統功能,監控運行情況,預測和優化作業參數,提升復雜環境作業性能。
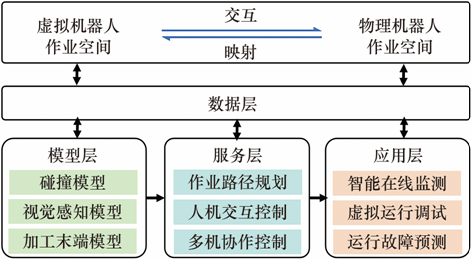
工業機器人數字孿生系統
相關系統已在多類裝備制造領域應用,如飛機智能制造平臺將實際生產數據融入數字孿生系統,提前規劃任務、調整參數。但機器人與制造環境復雜交互的數字孿生存在建模精度不高、數據交互整合困難、預測準確性和實時性欠佳等問題,需開展技術攻關推動發展與應用。
結語:
工業制品市場需求變化迅速,先進制造技術也在快速迭代,小批量、多品種、柔性化、易部署的多機器人智能制造系統將成為發展主流,多機交互、人機交互、機器人與場景交互的廣度和深度也將不斷拓展。
為應對復雜的交互需求,智能制造工業機器人技術需要在動態場景理解、集群化作業、柔性作業、具身智能、網絡化協同、數字孿生等方向著力突破,探索構建感知 – 規劃 – 控制一體化的復雜多維協同作業機制。加快形成制造模式柔性化、制造過程信息化、制造工序無人化的新型生產方式,為化解高端裝備制造難題提供新型解決方案,支撐高端裝備制造業的數字化、網絡化、智能化轉型升級。
審核編輯 黃宇
-
控制系統
+關注
關注
41文章
6797瀏覽量
112288 -
工業機器人
+關注
關注
91文章
3461瀏覽量
94337 -
智能制造
+關注
關注
48文章
5920瀏覽量
78011
發布評論請先 登錄
工業機器人:現代制造業的智能引擎
智造未來:工業機器人關鍵技術突破與場景化應用趨勢





 工商網監
工商網監
評論