") 蒙特卡洛模擬方法
蒙特卡洛模擬方法

本文來自加州大學(xué)洛杉磯分校計(jì)算機(jī)科學(xué)專業(yè)的本科生OneRaynyDay,他喜歡用清晰易懂且不失幽默的方式講述機(jī)器學(xué)習(xí)概念,尤其是其中的數(shù)學(xué)概念。相比作者這個(gè)“數(shù)學(xué)怪胎”,小編能力有限,只能盡力去計(jì)算驗(yàn)證和補(bǔ)齊文中未介紹的概念。如果內(nèi)容有誤,歡迎在留言中指出。
蒙特卡洛是座賭城
目錄
簡介
蒙特卡洛動作值
初識蒙特卡洛
蒙特卡洛控制
Monte Carlo ES On-Policy:? -Greedy Policies Off-policy:重要性抽樣
Python里的On-Policy Model
在強(qiáng)化學(xué)習(xí)問題中,我們可以用馬爾可夫決策過程(MDP)和相關(guān)算法找出最優(yōu)行動值函數(shù) q?(s,a)和v?(s),它通過策略迭代和值迭代找出最佳策略。
這是個(gè)好方法,可以解決強(qiáng)化學(xué)習(xí)中隨機(jī)動態(tài)系統(tǒng)中的許多問題,但它還有很多限制。比如,現(xiàn)實(shí)世界中是否真的存在那么多明確知道狀態(tài)轉(zhuǎn)移概率的問題?我們可以隨時(shí)隨地用MDP嗎?
那么,有沒有一種方法既能對一些復(fù)雜度過高的計(jì)算進(jìn)行近似求解,又能處理動態(tài)系統(tǒng)中的所有問題?
這就是我們今天要介紹的內(nèi)容——蒙特卡洛方法。
簡介
蒙特卡洛是摩納哥大公國的一座知名賭城,里面遍布輪盤賭、擲骰子和老虎機(jī)等游戲,類似的,蒙特卡洛方法的建模機(jī)制也基于隨機(jī)數(shù)和統(tǒng)計(jì)概率。
和一般動態(tài)規(guī)劃算法不同,蒙特卡洛方法(MC)以一個(gè)全新的視角來看待問題。簡而言之,它關(guān)注的是:我需要從環(huán)境中進(jìn)行多少次采樣,才能從不良策略中辨別出最優(yōu)策略?
論智注:關(guān)于動態(tài)規(guī)劃算法和MC的視角差異,我們可以舉這兩個(gè)例子:
問:1+1+1+1+1+1+1+1 =? 答:(掰手指)8。 問:在上式后再+1呢? 答:9! 問:怎么這么快? 答:因?yàn)?+1=9。 ——?jiǎng)討B(tài)規(guī)劃:記住求過的解來節(jié)省時(shí)間!
問:我有一個(gè)半徑為R的圓和一把豆子,怎么計(jì)算圓周率? 答:在圓外套一個(gè)邊長為2R的正方形,往里面隨機(jī)扔豆子。 問:此話怎講? 答:如果扔了N顆豆,落入圓里的豆子有n顆。N越大,n/N就越接近πR2/4R2。 ——MC:手工算完全比不過祖沖之,我好氣!
為了從數(shù)學(xué)角度解釋MC,這里我們先引入強(qiáng)化學(xué)習(xí)中的“return”(R),也就是“回報(bào)”概念,計(jì)算agent的長期預(yù)期收益(G):

有時(shí)候,當(dāng)前策略的狀態(tài)概率在這個(gè)episode內(nèi)是非零的,它在之后連續(xù)多個(gè)episode里也是非零的,我們就要綜合考慮當(dāng)前回報(bào)和未來回報(bào)的重要程度。
這不難理解,強(qiáng)化學(xué)習(xí)的回報(bào)往往有一定滯后性。比如下圍棋時(shí),當(dāng)前下的子可能目前看來沒有多大用處,但它在之后的局勢中可能會顯示出巨大的優(yōu)勢或劣勢,因此我們的圍棋agent需要考量長期回報(bào)。這個(gè)衡量標(biāo)準(zhǔn)就是折扣因子γ:
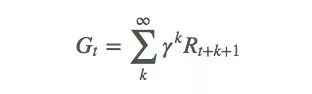
γ一般在[0,1]之間。當(dāng)γ=0時(shí),只考慮當(dāng)前回報(bào);當(dāng)γ=1時(shí),均衡看待當(dāng)前回報(bào)和未來回報(bào)。
有了收益Gt和概率At,我們就能計(jì)算當(dāng)前策略下,狀態(tài)s的函數(shù)值V(s):
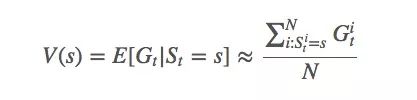
根據(jù)大數(shù)定律,當(dāng)N逼近∞時(shí),我們可以得到確切的函數(shù)期望值。我們對第i次模擬進(jìn)行索引。可以發(fā)現(xiàn),如果使用的是MDP(可以解決99%的強(qiáng)化學(xué)習(xí)問題),由于它有很強(qiáng)的馬爾可夫性,即確信系統(tǒng)下個(gè)狀態(tài)只與當(dāng)前狀態(tài)有關(guān),與之前的信息無關(guān):

我們可以推導(dǎo)出這樣一個(gè)事實(shí):t和期望值完全沒有關(guān)系。所以我們可以直接用Gs來表示從某個(gè)狀態(tài)開始的期望回報(bào)(將狀態(tài)前移到t = 0時(shí))。
初識蒙特卡洛
計(jì)算值函數(shù)最經(jīng)典的方法是對狀態(tài)s的每個(gè)first visit進(jìn)行采樣,然后計(jì)算平均值,也就是first-visit MC prediction。下面是找到最優(yōu)V的算法:
pi = init_pi()
returns = defaultdict(list)
for i in range(NUM_ITER):
episode = generate_episode(pi) # (1)
G = np.zeros(|S|)
prev_reward = 0
for (state, reward) in reversed(episode):
reward += GAMMA * prev_reward
# backing up replaces s eventually,
# so we get first-visit reward.
G[s] = reward
prev_reward = reward
for state in STATES:
returns[state].append(state)
V = { state : np.mean(ret) for state, ret in returns.items() }
另一種方法則是every-visit MC prediction,即計(jì)算s的所有visit的平均值。雖然兩者有輕微不同,但同樣的,如果visit次數(shù)夠大,它們最后會收斂到相似值。
蒙特卡洛動作值
如果我們有一個(gè)完整的模型,我們只需知道當(dāng)前狀態(tài)值,就能選擇一個(gè)可以獲得最高回報(bào)的動作。但如果不知道模型信息呢?蒙特卡洛的特色是無需知道完整的環(huán)境知識,只需經(jīng)驗(yàn)就能學(xué)習(xí)。因此當(dāng)我們不知道什么動作會導(dǎo)致什么狀態(tài),或者環(huán)境內(nèi)部會存在什么互動性時(shí),我們用的是動作值q*,而不是MDP中的狀態(tài)值。
這就意味著我們估計(jì)的是qπ(s,a),而不是vπ(s),回報(bào)G[s]也應(yīng)該是G[s,a]。如果原來G的空間維數(shù)是S,現(xiàn)在就成了S×A,這是個(gè)很大的空間,但我們還是得繼續(xù)對其抽樣,以找出每個(gè)狀態(tài)動作元組(state?action pair)的預(yù)期回報(bào)。
正如上一節(jié)提到的,蒙特卡洛計(jì)算值函數(shù)的方法有兩種:first-visit MC和every-visit MC。因?yàn)樗阉骺臻g過大,如果策略過于貪婪,我們就無法遍歷每個(gè)state?action pair,做不到兼顧exploration和exploitation。關(guān)于這個(gè)問題的解決方法,我們會在下一節(jié)具體講述。
蒙特卡洛控制
我們先來回顧一下MDP的策略迭代方式:

對于蒙特卡洛方法,它的迭代方式并沒有我們想象中的不同,也是先從π開始,然后是qπ0,再是π′……

論智注:從π到q的過程代表的是一個(gè)完整的策略評估過程,而從q到π則代表一個(gè)完整的策略過程。其中策略評估過程會產(chǎn)生很多episode,得到很多接近真實(shí)函數(shù)的action-value函數(shù)。和vπ0一樣,雖然這里我們估計(jì)出的每個(gè)動作值都是一個(gè)近似值,但通過用值函數(shù)的近似值進(jìn)行迭代,經(jīng)過多輪迭代后,我們還是可以收斂到最優(yōu)策略。
既然qπ0和vπ0并沒有那么不同,MDP可以用動態(tài)規(guī)劃法求解,那么我們也可以繼續(xù)套用貝爾曼最優(yōu)性方程(Bellman optimality equation),即:
如果不理解,這里有一份中文介紹:增強(qiáng)學(xué)習(xí)(三)——MDP的動態(tài)規(guī)劃解法。
下面就是exploration vs. exploitation。
Monte Carlo ES
面對這么大一個(gè)搜索空間,一個(gè)補(bǔ)救方法是假定我們每個(gè)episode都會從一個(gè)特定的狀態(tài)開始,并采取特定的行動,也就是exploring start,然后從所有可能回報(bào)中抽樣。它背后的思想是認(rèn)定我們能從任意狀態(tài)開始,并在每個(gè)episode之初采取所有動作,同時(shí)策略評估過程可以利用無限個(gè)episode完成。這在很多情況下是不合常理的,但在環(huán)境未知問題中卻有奇效。
在實(shí)際操作中,我們只需在之前的代碼塊里添加如下內(nèi)容:
# Before (Start at some arbitrary s_0, a_0)
episode = generate_episode(pi)
# After (Start at some specific s, a)
episode = generate_episode(pi, s, a) # loop through s, a at every iteration.
On-Policy:? -Greedy策略
那么,如果我們不能假設(shè)自己能從任意的狀態(tài)開始并采取任意的動作呢?不再貪婪,不再存在無限個(gè)episode,我們是否還能擬合最優(yōu)策略?
這就是On-Policy的思想。所謂On-Policy,指的是評估、優(yōu)化現(xiàn)在正在做決策的那個(gè)策略;而off-policy改進(jìn)的則是和現(xiàn)在正在做決策的那個(gè)策略不同的策略。
因?yàn)槲覀円安辉儇澙贰保詈唵蔚姆椒ň褪怯忙?greedy:對于任何時(shí)刻t的執(zhí)行“探索”小概率ε<1,我們會有ε的概率會進(jìn)行exploration,有1-ε的概率會進(jìn)行exploitation。相比貪婪策略,?-Greedy隨機(jī)選擇策略(不貪婪)的概率是ε/|A(s)|。
現(xiàn)在的問題是,這是否會收斂到蒙特卡洛方法的最優(yōu)策略π*?——答案是會,但只是個(gè)近似值。
?-Greedy收斂
讓我們從q和一個(gè)?-greedy策略π′(s)開始:
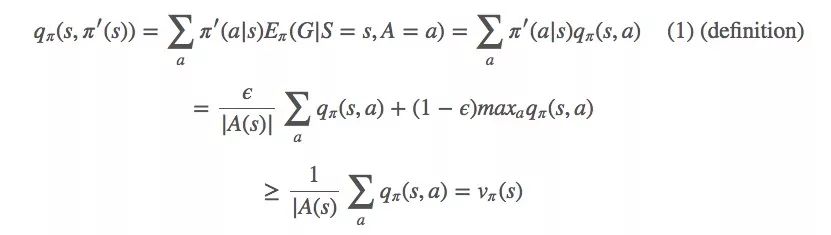
?-greedy策略像貪婪策略一樣對vπ做單調(diào)改進(jìn)。如果回到每一步細(xì)看,就是:
(1)
這是我們的收斂目標(biāo)。
這只是理論上的結(jié)果,它真的能擬合嗎?顯然不行,因?yàn)樽顑?yōu)策略是固定的,而我們選擇的策略是被迫隨機(jī)的,所以它不能保證收斂到π*——我們來重構(gòu)我們的問題:
假設(shè)我們不用概率ε在隨機(jī)選擇策略,而是無視規(guī)則,真正做到了完全隨機(jī)選擇策略,那么我們就能保證得到至少一個(gè)最優(yōu)策略。即,如果(1)里的等式成立,那么我們就有π=π',因此vπ=vπ',受環(huán)境約束,這時(shí)我們獲得的策略是隨機(jī)情況下最優(yōu)的。
Off-policy:重要性抽樣
Off-policy注釋
我們先來看一些定義:
π:目標(biāo)策略,我們希望能優(yōu)化這些策略已獲得最高回報(bào);
b:動作策略,我們正在用b生成π之后會用到的各種數(shù)據(jù);
π(a|s)>0?b(a|s)>0?a∈A:整體概念。
Off-policy策略通常涉及多個(gè)agent,其中一個(gè)agent一直在生成另一個(gè)agent試圖優(yōu)化的數(shù)據(jù),我們分別稱它們?yōu)樾袨椴呗院湍繕?biāo)策略。就像神經(jīng)網(wǎng)絡(luò)比線性模型更“有趣”,同樣的,Off-policy策略一般也比On-Policy策略更好玩,也更強(qiáng)大。當(dāng)然,它也更容易出現(xiàn)高方差,更難收斂。
重要性采樣則是統(tǒng)計(jì)學(xué)中估計(jì)某一分布性質(zhì)時(shí)使用的一種方法。它在這里充當(dāng)?shù)慕巧腔卮稹敖o定Eb[G],Eπ[G]是什么”?換句話說,就是我們?nèi)绾问褂脧腷抽樣得到的信息來確定π的預(yù)期回報(bào)?
直觀來看,如果b選了很多a,π也選了很多a,那b在π中應(yīng)該發(fā)揮著重要作用;相反地,如果b選了很多a,π并不總是跟著b選a,那b因a產(chǎn)生的狀態(tài)不會對π因a產(chǎn)生的狀態(tài)產(chǎn)生過大影響。
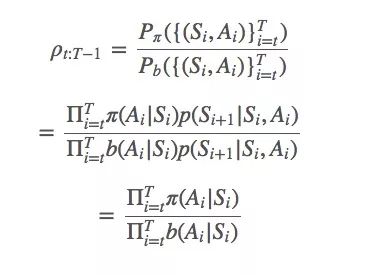
以上就是重要性采樣的基礎(chǔ)思想。給定從t到T的策略迭代軌跡(Si,Ai)Ti=t,策略π擬合這個(gè)軌跡的可能性是:

簡單地說,π和b之間的比率就是:
一般重要性采樣
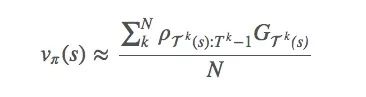
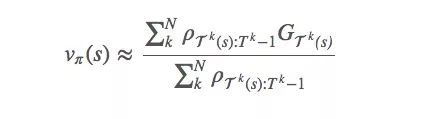
現(xiàn)在我們有很多方法可以用ρt:T?1計(jì)算Eπ[G]的最優(yōu)解,比如一般重要性采樣(ordinary importance sampling)。設(shè)我們采樣了N個(gè)episode:

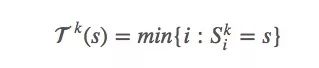
s的首次出現(xiàn)時(shí)間是:
因?yàn)橐烙?jì)vπ(s),所以我們可以用之前提到的first-visit方法計(jì)算均值來估計(jì)值函數(shù)。
這里用first-visit只是為了簡便,我們也可以把它擴(kuò)展到every-visit。事實(shí)上,我們應(yīng)該結(jié)合不同方法來衡量每個(gè)episode的回報(bào),因?yàn)槿绻心軘M合最優(yōu)策略的軌跡,我們應(yīng)該給它更多權(quán)重。
這種重要性抽樣方法是一種無偏差估計(jì),它可能存在嚴(yán)重的方差問題。想想那個(gè)重要性比率,如果在第k輪的某個(gè)episode之中,ρT(s):Tk?1=1000,這就太大了,但它完全有可能存在。那這個(gè)1000會造成多大影響?如果我們只有一個(gè)episode,它的影響可想而知,但因?yàn)閺?qiáng)化學(xué)習(xí)任務(wù)往往很長,再加上里面有很多乘法計(jì)算,這個(gè)比例會存在爆炸和消失兩種結(jié)果。
加權(quán)重要性采樣
為了降低方差,一種可行的方法是加入權(quán)重來計(jì)算總和:
這被稱為加權(quán)重要性采樣(weighted importance sampling)。它是一個(gè)有偏差的估計(jì)(偏差趨于0),但與此同時(shí)方差降低了。如果是實(shí)踐,強(qiáng)烈建議加權(quán)!
增量式實(shí)現(xiàn)
蒙特卡洛預(yù)測方法也可以采用增量式的實(shí)現(xiàn)方式,假設(shè)我們使用上節(jié)中的加權(quán)重要性采樣,那么我們可以得到如下形式的一些抽樣算法:
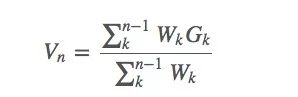
其中Wk是我們的權(quán)重。
假設(shè)我們有了估計(jì)值Vn和當(dāng)前獲得的回報(bào)Gn,要利用Vn與Gn來估計(jì) Vn+1,同時(shí),我們用∑nkWk表示前幾輪回報(bào)的權(quán)重之和Cn。那么這個(gè)等式就是:
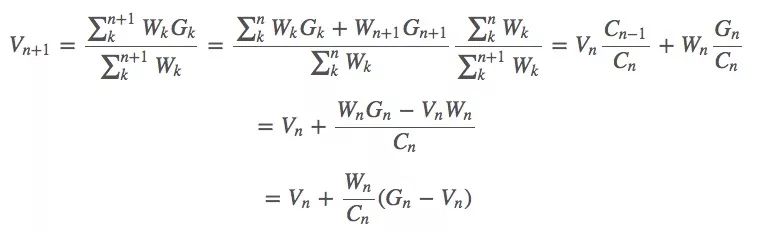
權(quán)重:Cn+1=Cn+Wn+1
現(xiàn)在,這個(gè)Vn就是我們的值函數(shù),同樣的方法也適用于求動作值函數(shù)Qn。
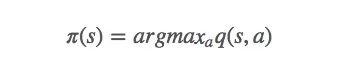
在我們更新價(jià)函數(shù)的同時(shí),我們也可以更新我們的策略π—— argmaxaQπ(s,a)。
注:這里涉及很多數(shù)學(xué)知識,但已經(jīng)很基礎(chǔ)了,確切地說,最前沿的也和這個(gè)非常接近。
下面還有針對折扣因子、獎(jiǎng)勵(lì)的抽樣簡介,具體請看原文,小編動不了了。
Python里的On-Policy Model
由于蒙特卡洛方法的代碼通常具有相似的結(jié)構(gòu),作者已經(jīng)在python中創(chuàng)建了一個(gè)可以直接使用的蒙特卡洛模型類,感興趣的讀者可以在Github上找到代碼。
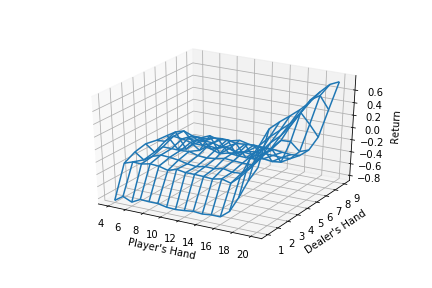
他還在原文中做了示例:用? -greedy policy解決Blackjack問題。
總而言之,蒙特卡洛方法利用episode的采樣學(xué)習(xí)最佳值函數(shù)和最佳策略,它無需建立對環(huán)境的充分認(rèn)知,在不符合馬爾可夫性時(shí)性能穩(wěn)定,是一種值得嘗試的好方法,也是新人接觸強(qiáng)化學(xué)習(xí)的一塊良好基石。
本文參考閱讀:
[1]增強(qiáng)學(xué)習(xí)(二)——馬爾可夫決策過程MDP:https://www.cnblogs.com/jinxulin/p/3517377.html
[2]增強(qiáng)學(xué)習(xí)(四)——蒙特卡羅方法(Monte Carlo Methods):http://www.cnblogs.com/jinxulin/p/3560737.html
[3]算法-動態(tài)規(guī)劃 Dynamic Programming--從菜鳥到老鳥:https://blog.csdn.net/u013309870/article/details/75193592
[4]蒙特卡羅用于計(jì)算圓周率pi:http://gohom.win/2015/10/05/mc-forPI/
[5]蒙特卡洛方法 (Monte Carlo Method):https://blog.csdn.net/coffee_cream/article/details/66972281
-
機(jī)器學(xué)習(xí)
+關(guān)注
關(guān)注
66文章
8499瀏覽量
134341 -
蒙特卡洛
+關(guān)注
關(guān)注
0文章
13瀏覽量
8282
發(fā)布評論請先 登錄
模擬電路故障:用PSPICE做電路故障蒙特卡洛分析遇到問題
求助關(guān)于multisim中蒙特卡洛分析不能添加輸出節(jié)點(diǎn)的問題
蒙特卡洛分析方法示例
做蒙特卡洛分析時(shí)出現(xiàn)錯(cuò)誤是什么原因?qū)е碌模?/a>
求助!!!!蒙特卡洛仿真時(shí)出現(xiàn)錯(cuò)誤如何解決???
基于蒙特卡洛方法的碰撞預(yù)警系統(tǒng)仿真
蒙特卡洛模擬方法與應(yīng)用
蒙特卡洛模擬優(yōu)缺點(diǎn)

空調(diào)負(fù)荷虛擬儲能模型研究
電網(wǎng)概率無功優(yōu)化調(diào)度





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論