") 未來GitHub加入了微軟生態(tài),又會扮演著什么樣的角色?
未來GitHub加入了微軟生態(tài),又會扮演著什么樣的角色?
gitHub代碼托管平臺被微軟收購,開源社區(qū)平臺注定自身賺起錢來相當(dāng)吃力。未來GitHub加入了微軟生態(tài),又會扮演著什么樣的角色?在GitHub“淪落”前,這些自動駕駛項(xiàng)目值得多看幾遍。
gitHub是一個(gè)面向開源及私有軟件項(xiàng)目的托管平臺,因?yàn)橹恢С謌it 作為唯一的版本庫格式進(jìn)行托管,故名gitHub。作為開源代碼庫以及版本控制系統(tǒng),Github擁有超過900萬開發(fā)者用戶。隨著越來越多的應(yīng)用程序轉(zhuǎn)移到了云上,Github已經(jīng)成為了管理軟件開發(fā)以及發(fā)現(xiàn)已有代碼的首選方法。
而就在上周末,微軟正在洽談準(zhǔn)備全資收購 GitHub的消息傳的沸沸揚(yáng)揚(yáng)。彭博新聞社 6 月 4 日凌晨發(fā)布最新報(bào)道稱,據(jù)熟悉此事的消息人士透露,微軟已同意收購 GitHub Inc.,并最快會在今天宣布這筆交易。
與此同時(shí),我們還注意到GitHub競品之一的GitLab順勢推出了從 GitHub 遷移到GitLab的工具 ,并且從6月4日零點(diǎn)開始,無論是Project還是Repository都瞬間迎來了遷移高峰。
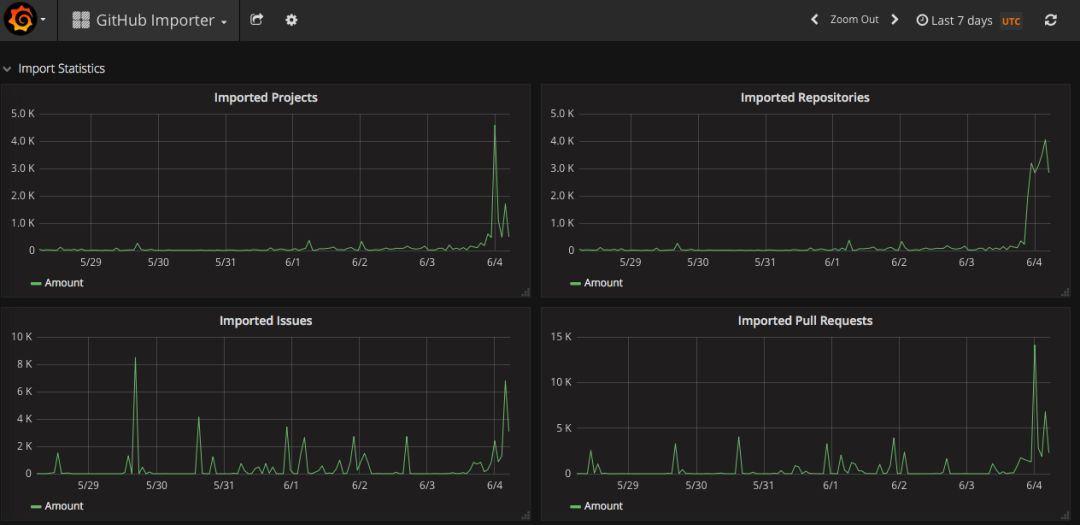
在傳出微軟收購 GitHub 的消息后,GitLab 在其官網(wǎng)發(fā)布了一篇文章表示祝賀,并表示微軟此次收購也意味著軟件開發(fā)者的影響力在日益增長,他們是新的王者,他們在組織中的影響力正隨著他們的價(jià)值而不斷增長。
在聽到GitHub或?qū)⒈晃④洝耙?0億美金收購”的消息時(shí),絕大多數(shù)程序員的內(nèi)心想必是拒絕的,“GitHub應(yīng)該保持中立,不能被任何公司收購……”,也有開發(fā)者表示:“誰收購GitHub并不重要,重要的是時(shí)刻保持一顆開源的心。為全球開發(fā)者提供一個(gè)舒適的平臺,一起改變世界。”
GitHub未來被收購后,是否能繼續(xù)保持一顆開源的心,這個(gè)問題不得而知。然而對于開發(fā)者來說,那些高點(diǎn)贊的自動駕駛項(xiàng)目值得多看幾篇。
1.Udacity項(xiàng)目
Udacity很早以前就開啟了開源自駕車項(xiàng)目——Udacity 無人駕駛車工程師納米學(xué)位(Nanodegree)系列計(jì)劃,他們決定開發(fā)自動駕駛Nanodegree計(jì)劃時(shí),為了教世界建立自動駕駛汽車,解決自動駕駛問題。谷歌自駕車創(chuàng)始人兼Udacity總裁塞巴斯蒂安特朗組建了我們的核心自動駕駛團(tuán)隊(duì),由全球數(shù)百名學(xué)生撰寫開源代碼。
以下是Udacity開源項(xiàng)目的列表:
深度學(xué)習(xí)轉(zhuǎn)向模型——訓(xùn)練了許多不同的神經(jīng)網(wǎng)絡(luò)來預(yù)測汽車的轉(zhuǎn)向角度。
相機(jī)安裝——支持可使用標(biāo)準(zhǔn)GoPro硬件安裝的鏡頭和相機(jī)機(jī)身
注釋的駕駛數(shù)據(jù)集——許多小時(shí)的標(biāo)記駕駛數(shù)據(jù)
駕駛數(shù)據(jù)集——超過10小時(shí)的駕駛數(shù)據(jù)(激光雷達(dá),相機(jī)等)
ROS指導(dǎo)節(jié)點(diǎn)——有助于深度學(xué)習(xí)模型與ROS進(jìn)行交互
Udacity還專門設(shè)計(jì)了模擬器Unity,使用一個(gè)深度神經(jīng)網(wǎng)絡(luò)來模擬人類的駕駛行為。在訓(xùn)練階段,我們使用鍵盤在模擬器內(nèi)對我們的車進(jìn)行導(dǎo)航。當(dāng)駕駛汽車時(shí),模擬器會記錄訓(xùn)練圖像和相應(yīng)的轉(zhuǎn)向角度。然后使用這些記錄的數(shù)據(jù)來訓(xùn)練我們的神經(jīng)網(wǎng)絡(luò)。訓(xùn)練模型會在兩個(gè)軌道上進(jìn)行測試,即訓(xùn)練軌道和驗(yàn)證軌道。
GitHub地址:
https://github.com/udacity/self-driving-car-sim
2.CPFL/Autoware項(xiàng)目
由Tier IV維護(hù)的用于城市自動駕駛的開源軟件。支持以下功能:
3D本地化
3D映射
路徑規(guī)劃
路徑跟隨
加速/剎車/轉(zhuǎn)向控制
數(shù)據(jù)記錄
汽車/行人/物體檢測
交通信號檢測
交通燈識別
車道檢測
對象跟蹤
傳感器校準(zhǔn)
傳感器融合
面向云的地圖
連接自動化
智能手機(jī)導(dǎo)航
軟件仿真
虛擬現(xiàn)實(shí)
該項(xiàng)目既可以模擬,也可以在真車上測試。為了安全使用,那些沒有有真正自動駕駛車輛的人可以在一種基于ROSBAG的軟件上模擬。將Autoware用于真正的自動駕駛車輛,需要現(xiàn)場測試之前制定安全措施和風(fēng)險(xiǎn)評估。
GitHub地址:
https://github.com/CPFL/Autoware
卷積神經(jīng)網(wǎng)絡(luò)(CNN)控制ETS2內(nèi)的方向盤
Europilot是一個(gè)開源項(xiàng)目,它使用python控制Euro Truck Simulator 2開發(fā)自我駕駛算法的工具包。利用流行的歐洲卡車模擬器(ETS2)開發(fā)自動駕駛算法。使用europilot,可以捕獲游戲屏幕輸入,并以編程方式控制模擬器內(nèi)的卡車。Europilot可以以兩種方式之一使用:培訓(xùn)或測試。對于培訓(xùn),europilot可以實(shí)時(shí)捕獲屏幕輸入并輸出一個(gè)numpy數(shù)組,同時(shí)獲取輪盤游戲桿值。相關(guān)屏幕截圖和游戲桿值之間的映射被寫入一個(gè)csv文件。

在csv文件中,每行都有帶游戲桿值的截圖文件名。為了進(jìn)行測試,europilot可以創(chuàng)建一個(gè)可在游戲內(nèi)部識別的虛擬游戲桿驅(qū)動程序,該驅(qū)動程序可用于以編程方式控制卡車。使用此游戲桿,您可以創(chuàng)建一個(gè)實(shí)時(shí)推理網(wǎng)絡(luò),將網(wǎng)絡(luò)屏幕作為輸入,并輸出相關(guān)的游戲桿命令,如轉(zhuǎn)向。
GitHub地址:
https://github.com/marsauto/europilot
4.comma.ai/openpilot
這是“神奇小子”George Hotz 創(chuàng)辦的自動駕駛初創(chuàng)公司 Comma.ai 分享的一款開源駕駛代理openpilot。目前它可以為Hondas,Acuras和Toyotas等車型提供自適應(yīng)巡航控制(ACC)和車道保持輔助系統(tǒng)(LKAS)的功能。他還提供了一份硬件組裝指南,指導(dǎo)極客用戶自己動手打造一個(gè)即插即用的輔助駕駛套件。
5.Voyage
我們之前介紹過,Voyage已經(jīng)開始分享其為自己的L4自動駕駛出租車開發(fā)的安全要求,測試場景,指標(biāo),工具和代碼,其被稱為開放式自主安全(OAS)的初始版本,將采用GitHub存儲庫來公布文檔和代碼。第一版包括情景測試,功能安全,自主評估和測試工具包。下半年,OAS還將發(fā)布駕駛員培訓(xùn)材料,其他場景和故障注入代碼及測試內(nèi)容。
-
微軟
+關(guān)注
關(guān)注
4文章
6676瀏覽量
105449 -
自動駕駛
+關(guān)注
關(guān)注
788文章
14242瀏覽量
169908 -
GitHub
+關(guān)注
關(guān)注
3文章
481瀏覽量
17513
原文標(biāo)題:微軟收購GitHub!在GitHub“淪落”前,這些自動駕駛項(xiàng)目值得多看幾遍
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
開關(guān)柜一鍵順控在智能配電運(yùn)管系統(tǒng)扮演什么角色?

工業(yè)互聯(lián)網(wǎng)平臺在智能制造中扮演什么角色?
嵌入式教育科普|SPI接口全面解析

gitee 與 GitHub 的比較
求問帖!靜電消除器在電子半導(dǎo)體領(lǐng)域的具體應(yīng)用與需求!
芯片在智能手機(jī)中扮演什么角色?
加密算法在網(wǎng)絡(luò)安全中扮演什么角色?
什么是MOS管,MOS管在電池系統(tǒng)中扮演著什么角色

物聯(lián)網(wǎng)數(shù)據(jù)采集網(wǎng)關(guān)在物聯(lián)網(wǎng)中扮演的角色

微軟GitHub與Anthropic和谷歌合作
工控主板在工業(yè)控制中扮演什么角色
解鎖無界網(wǎng)絡(luò):海外動態(tài)IP在跨境業(yè)務(wù)中的關(guān)鍵角色
安泰電壓放大器的設(shè)計(jì)要求是什么樣的

5G智能防爆手持終端在石油化工行業(yè)中扮演著什么角色?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論