 關鍵點檢測技術的基本原理、關鍵點檢測的基本方法
關鍵點檢測技術的基本原理、關鍵點檢測的基本方法
6月30日下午,在七牛架構師實踐日第二十九期吳子章進行了《關鍵點檢測技術在自動駕駛視覺感知中的應用》為題的實戰分享。本文是對演講內容的整理。
縱目科技自動駕駛感知算法經理,主要研究道路場景下的目標檢測、分割及跟蹤,并推進相關算法性能優化與嵌入式移植等。
在自動駕駛中,環境感知是一個非常重要的環節,它不僅可以幫助無人駕駛汽車進行定位,還可以告知障礙物等信息以幫助決策模塊去調整駕駛行為。在視覺感知任務中,實際上有很多細分的任務類型,比如目標檢測、目標跟蹤、語義分割、實例分割、關鍵點檢測等,而這些細分任務在我們的環境感知中都有著非常重要的應用。
本次分享主要從以下內容展開:
介紹關鍵點檢測技術的基本原理、關鍵點檢測的基本方法、該技術自動駕駛當中的應用,以及關鍵點檢測技術現存哪些問題,未來發展的方向以及在自動駕駛中的發展潛力。
01
關鍵點檢測技術簡介
在圖像處理中,關鍵點本質上是一種特征。它是對一個固定區域或者空間物理關系的抽象描述,描述的是一定鄰域范圍內的組合或上下文關系。它不僅僅是一個點信息,或代表一個位置,更代表著上下文與周圍鄰域的組合關系。
比如在人臉關鍵點檢測任務當中,有 28 個關鍵點,或是現在比較流行的 64 個、128 個關鍵點,這里面每個點在不同的人臉當中,代表了一類的特征,且具有一定的通用性。這一類特征不僅包含了像素的一些特性,比如嘴唇的特征點,包含了嘴唇與面部的位置關系。
右邊的圖片是前段時間比較火的阿里推出的服飾關鍵點比賽,比如在這件服飾中提供了 13 類關鍵點,每個關鍵點之所以被定位為一類關鍵點,因為它代表了服飾當中某一個特定的位置,或者某一個特定的位置所能代表的周圍的關系。而在人體姿態檢測當中,這個關鍵點不僅代表一個關節,還代表著這個關節和其他關節之間的關系,比如這個關節能跟其他哪些關節聯系得比較緊密。
02
關鍵點檢測的兩個類型和方法
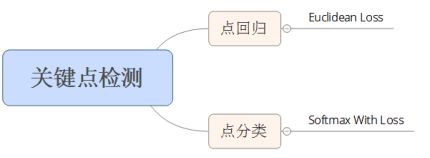
一個方面是用點回歸的方式來解決,另一個是用點分類的方法。但是這兩個方法,都是一種手段或者是途徑,解決的問題就是幫助我們把這個點在圖像當中的位置與關系給找出來。
關鍵點檢測技術原理
以 openpose 的人體關鍵點為例,這是大家比較熟悉的一個人體關鍵點檢測的網絡。
網絡從輸入圖像開始經過基礎段提取特征,這些特征幫助后面進行關鍵點回歸和關系回歸提供一些素材。如果前面的特征不夠豐富的話,后面處理的結果也很難達到理想的效果。這也是大網絡普遍會比小網絡處理問題具有更高精度的最主要的一方面原因。但是對于小網絡來說,把這些特征都保持下來,或者提出比原來大網絡更加豐富的特征,但是占用的空間不需要那么大,這樣會比過去的大網絡具有更加精確的處理結果,占用的空間和效率都可以看到這方面的探索。這方面的探索在許多自動駕駛當中都會被用到,所有算法需要跑到汽車上去測,需要在嵌入式的板塊上面實時跑起來,而不需要在其他比較大的平臺上面跑。
這是比較經典關鍵點檢測網絡,它的設計非常簡明:一個分支去回歸它的點,另一個分支去回歸它的關系。這個點標簽和關系標簽,都是用上圖的類似方式去定義。這種定義的方法減輕了回歸的難度。所用的多階段的方式,相當于每個階段給我們提供出來一定的結果。下一個階段對這個結果進行多階段精度的實驗,在我們沒有檢測當中或者是其他分割當中,其他領域當中都有很多類似方法出現。
從上面右圖當中可以看到,通過多階段的精度看到點的效果是整體上是在不斷提高的,即便有個別的點可能下降,這也屬于是正常的情況,因為它做了多階段的融合。這種處理方法,在基于深度學習的處理手段當中是比較常見的。現在關系的回歸,也是經過這樣多階段的精修,能夠考慮或結合到各種不同階段的信息,它的處理結果也在不斷提高。這種方法在我們三維的車輛檢測當中,或者是二維的檢測當中,也是經常用到的。
在關鍵點檢測當中,關系的回歸是非常重要的一種。對關系的定義,可以在兩個點之間定義一部分的關系,或者是定義一個比較窄的領域去做的一件事情,這也就是我們論文當中經常會提到的一種場的定義。
場的定義相當于在一個領域范圍之內,對它進行一定的加強定義,包括位置和朝向等,這屬于是一個多維度的考量。這種方式可以幫助我們解決在一個圖片當中或者是一次檢測任務當中,出現出現多個目標、關系,同時多個目標和當中的點需要進行互相關系的聯連通的時候,這個方法會有優勢。因為它會幫助我們剔除掉不同標簽之間點的錯誤連接,同時也能夠幫助剔除掉一些不符合關系約束的點。
以剛才 openpose 的方法為例,它回歸的精度,受限于圖片下采樣的倍數。比如在 MIT 的論文當中,它的精度就是在 8 x 8 這樣一個像素范圍之內。
如果要提高我們回歸的精度,有兩種方式:一種就是降低下載的倍數,盡量在大圖上做這個事情。原作者不在大圖上做這件事情是因為在大圖上得不到這么好的效果,圖越大,回歸難度,也就是回歸的范圍就越大,所以采取了這樣一個降采樣,把任務的難度降低。
關鍵點檢測的通用性
這個通用關鍵點可以體現在以下幾個方面:
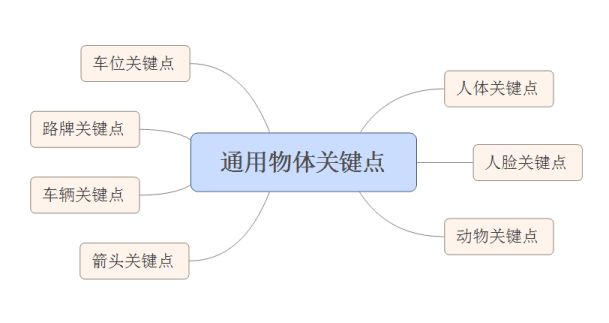
在自動駕駛當中,通過這個關鍵點可以找出人的行為,比如在停車場中看到一個保安正在向我們揮手,這個車位是有特殊用途的,你們不可以停。或者是在一些駕駛環境當中,做一些人臉關鍵點的檢測,幫助我們去識別出駕駛人員的情緒、精神的狀態等。另外一方面,可以用這種方式去幫助識別出一些馬路邊突然出現的一條小狗。在我們自動駕駛車輛跑的過程當中,如果遇到這種問題,要識別出的不能只是一個簡單的障礙物,是一個不可控的動物,也要通過關鍵點識別出它的動作,是要下蹲還是橫穿這條路。
其次,車輛在外面跑的時候,我們通過觀察路面上的一些路面標志,比如路牌、地面上的箭頭,或者是其他一些關鍵標志,這些標記的點是可以幫助我們去定位,可以在地圖上找到這些定位點,我們通過這些點能夠輔助我們更精確地獲得我們實時的位置,起到更精確的定位作用。
03
關鍵點檢測在自動駕駛中的應用
在自動駕駛當中,有一些關鍵點檢測的應用。
比如箭頭的檢測,檢出箭頭的同時,可以把它的關鍵節點回歸出來,不同的顏色的點代表不同的類型,并且不同的點有它的位置信息。通過這些點,作為地圖上的坐標,可以實時、精確地告訴車輛,告訴自動駕駛的大腦,我們現在的位置。箭頭的關鍵點檢測,也是用了類似的方法,雖然它的網絡模型已經改得面目全非了,但是它的原理是一樣的,通過不同等級的金字塔級別,可以把不同級別的點信息融合起來,從而提高它的精度,另一方面提高它的檢測率。
在箭頭或者是其他的一些關鍵點當中,也是需要知道每個點和另外一個點之間連接的關系,也就是它關系的回歸。
并不是所有的點回歸都能夠很精確。比如有些點在圖像上,車輛運行過程中,有些箭頭的關鍵點可以準確地回歸出來,有些可能識別出來錯誤,這受限于我們之前學習到的經驗等。這類問題可以通過一些后續的改進,比如說網絡的改進、攝像本身的改進。另外也可以通過后期的其他公式、其他算法上用的多一幀或是匹配的方式,去修正一下錯誤。
另外在自動泊車或者自主泊車當中,需要先檢測出車位,我們用點回歸的方式可以把車位的頂點回歸出來。在一個圖象當中,可以回歸出車位當中的一些關鍵點,這個關鍵點是有不同類型的。通過車位的關鍵點,我們可以精確獲知到我們實車或者是車輛自身距離這些關鍵點和車位之間距離是多少,我們相對的要調整控制模塊,使得我們能夠自動泊進去這個車位。所以,回歸的車位頂點信息,對我們自動泊車或者是自主泊車來說是非常重要的信息。
另外,利用點回歸的方式,同時結合語義分割的手段,可以給出一個信息更加豐富的結果,網絡可以輸出這方面的結果,相當于是分割出來的車位信息、車庫當中車輛數的信息、車位是不是空車位、這個區域是不是空車位的信息。
同時通過點回歸的方式,在網絡的另一個分支,可以得到關鍵點的位置在哪里。比如我們知道這個地方是個空車位,我們也知道它車位的位置,這樣對我們自動泊車來說,就可以直接去停,這是很好的感知功能。
除此之外,在室外的一些定位當中,可以用關鍵點回歸的方法去回歸路牌的定點。可以通過這個點反饋在地圖上,更加精確地知道我們實時的位置。對路牌來說,2D 目標檢測并不能全面描述其信息,因為圖像中有很多傾斜的路牌。通過點回歸的方式,可以清晰地得到它在圖像中的真實形狀與位置。通過一些攝像機的成像原理,或其他的修正手段,可以把這個位置信息投影到真實的三維信息當中去,更好地幫助我們確定車輛自身在三維世界當中的位置。
在圖象當中做二維 bounding box 之或做三維bounding box 的目標檢測,點和點之間的關系后剩下的頂點其實就可以看做是關鍵點,去掉的這個關系就是它的框,也就是它的連接關系。所以,去掉連線之后,就可以看成一個點回歸的問題。做目標檢測或者是做三維目標檢測當中,比較重要的研究問題是如何把這個點回歸的問題做得更精確。有很多人用一些模板的方式,比如說像目前百度的 Apollo 2.5 當中,其實有一個模式是相當于把這邊真實的三維的候選做了很多匹配,看哪個跟檢測出來的更相近或者更相匹。
這個方法,其他公司也有類似的狀況,在做點回歸的時候,都是直接在圖片當中做三維的點回歸,因為二維的點回歸是比較相似的。我們可以看到在比較遠處時候,就直接二維回歸,在稍微近一點的時候,可以做三維的點回歸。因為在遠處的時候,這個側面是很難看出來的,在相對比較近的時候,可以精確地描述。目標車輛下面這個斜邊代表著它的航向角,這個航向角和公共的航向角定義不太一樣,相當于這個車身的航向角,這個航向角對我們來說很主要的,可以判斷出或者是輔助我們判斷出前方車輛運動的趨勢或者是運動的范圍。
因為結合多幀信息,這個航向角會有變化的曲線,我們根據這個曲線可以預測出這個車輛是否有變道,或者是否有急轉這樣的趨勢。通過這樣的信息,可以幫助決策模塊做一些重要的決策。比如預測出前方車輛要變道插隊了,防插隊也是我們自動駕駛當中遇到的很重要的問題;比如很多車,做 L1 和 L2 的方案當中,在嘗試編程當中,前方車輛如果要插隊,對我們自動駕駛的車輛來說很難識別。前面的車有沒有插隊的趨勢,一般都是是有一定經驗的司機能夠準確或者是最高精度地判斷出來。因為是否能夠判斷出前方車輛司機有插隊趨勢,對于我們正常的人類司機來說,也造成了很多的事故。因為判斷不出來前面的車輛是否有插隊的趨勢,而前面的很多新手司機突然變道,這樣就會發生一些比較經典的擦碰或者是追尾事故。這類事故放在自動駕駛車輛上來說,理論上可以做到比人類更高的精度。
用點回歸的方式,可以去解決在一些場景當中三維目標檢測的問題。對于點回歸來說,需要根據周圍的關系去判斷這個點是不是應該在這里。而在三維檢測的時候,經常會出現目標不全或者是目標存在一定遮擋的問題,這就需要我們去增加它的感受范圍,或者是增強它在這方面的處理能力,這是可以去有效規避的事情。
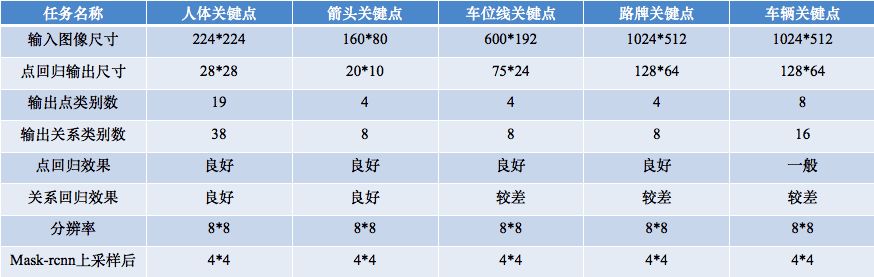
可以用一些小的網絡去做,比如說這張表當中描述的是用不同的方法去回歸點不同的任務,如人體、箭頭、車位線、路牌、車輛等,還有很多其他類型的點回歸任務,都可以用這種方法,總體上來說,都是可以去解決,但是處理的能力是有限的。比如在車輛的關鍵點上來說,車輛的關鍵點回歸的時候,整體回歸的效果一般,因為車輛本身也是一個比較難的問題,整體的精度也比 2D 的要低很多。目前精度比較高的方法仍然是以激光雷達數據為輔助的方法,以視覺為主的方法目前還沒有打進前三名,甚至只能排前十。
另外一方面,在用經典的 mask-rcnn 方法去做這類問題的時候,也受限于剛才所說的精度問題,下采樣的倍數越高,回歸得到的結果精度就越難以保證。這方面用到了很多級聯的方法來提高精度,比如先用一個 28 x 28 的,再用 56 x 56 的,再用一個 112 x 112 的,這樣精度逐漸提高了,但是它的運算量并沒有被提高,或者復雜度并沒有被提高,不是乘的關系而是加的關系,用兩者的策略做的事情。這在我們的算法工程師或者是同行業當中,應該不是什么難的問題。
04
目前關鍵點檢測存在的幾個問題
以上這三點,是我們在探索點回歸任務當中,所遇到的比較典型的三類問題。
另外,在城市道路或者是園區、停車場這些場景當中,點回歸任務或關鍵點停車的任務可以有更多的應用。但凡是能夠被抽象出來作為一個典型的位置和關鍵代表的點的事物,都可以把它抽象出一些點。這些點都可以利用這種技術,去回歸、檢測出來,從而提高我們的感知處理能力。
05
未來的發展方向及潛力
1.通用性
指的是需要能夠在一個網絡,把里面很多種類型的點回歸,全部做出來。而不是說做一個任務,就要一個網絡,因為網絡本來就很小。通用性就是我們要用一個網絡去做很多類任務的回歸。
2.小型化
在網絡基礎上可以用更小、但細節仍然豐富的網絡。目前在 1 - 2M 這樣的大小也可以夠用,盡管正常的 VGG16 在 500M 左右。即便這樣,模型信息其實仍然有很大的冗余,這里面還有很多探索的空間。
3.更高的精度
有的精度受限于 mask 下采樣的分辨率,或者說下采樣的倍數。這就要提高算法的處理能力,以便可以在更大的搜索空間中回歸出點的位置,即降低下采樣的倍數,以提高精度。
4.更強的泛化
曾經也碰到了很多候選框稍微偏一點關鍵點就回歸不出來的問題。遇到這種情況需要提高算法對候選框偏移的適應能力,或者想辦法減少或削弱候選框偏移的問題。這也是很多做自動駕駛方案的公司或研究機構共同面臨的問題,大家一直在嘗試做出泛化能力更強的方法來。
-
檢測技術
+關注
關注
2文章
360瀏覽量
29506 -
無人駕駛
+關注
關注
99文章
4156瀏覽量
122976 -
自動駕駛
+關注
關注
788文章
14225瀏覽量
169728
原文標題:吳子章:關鍵點檢測技術在自動駕駛視覺感知中的應用
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
語音處理檢測技術端點檢測、降噪和壓縮詳解
機器視覺圖像處理之角點檢測技術
Firefly RK3399Pro開源主板 + 單目攝像頭,人體特征點檢測方案
基于平均密度的孤立點檢測研究
基于角點檢測方法的圖像關鍵點定位

基于語音增強方法的語音端點檢測
FAST特征點檢測features2D
一個新的信號奇異點檢測方法
firefly人體特征點檢測介紹

PFLD:一個實用的人臉關鍵點檢測器

英碼科技EA500I基于昇騰Mind SDK實現實時人體關鍵點檢測

英碼科技EA500I基于昇騰Mind SDK實現實時人體關鍵點檢測






 工商網監
工商網監
評論