") 高階自動駕駛在高速公路交匯處的“禮貌行為”
高階自動駕駛在高速公路交匯處的“禮貌行為”

第29屆IEEE國際智能車大會(IEEE IV 2018)于6月30日在江蘇常熟順利落幕,本屆大會BestPaperAwards最佳論文獎分別頒給了來自德國寶馬集團,德國法蘭克福歌德大學以及日本金澤大學的三篇優(yōu)秀論文。這三篇論文到底有何創(chuàng)新點,能從600余篇論文中脫穎而出?本文簡述了IV2108最佳論文獎三篇論文。(公眾號后臺回復:IV最佳論文獎,即可下載三篇論文PDF。)
本屆IV大會共收到了來自34個國家的603篇論文,其中確認接收的論文346篇,在所有接收的論文里,Automated Vehicles, Vision Sensing and Perception, and Autonomous / Intelligent Robotic Vehicles成為本屆論文最熱的關(guān)鍵詞。
IV會議共設(shè)有“BestPaperAwards”、 “BestStudentPaperAwards” 、 “ BestWorkshop / Special Session Paper Awards ” 、 “Best Poster Paper Awards ” 和 “BestApplication Paper Awards”五大獎項。本文主要介紹獲得BestPaperAwards(最佳論文獎)的三篇論文,論文作者分別來自德國寶馬集團,德國法蘭克福歌德大學以及日本金澤大學。
First Prize:
本屆IV會議最佳論文獎一等獎頒給了來自德國慕尼黑寶馬集團的論文Courtesy Behavior for Highly Automated Vehicles on Highway Interchanges(高階自動駕駛在高速公路交匯處的“禮貌行為”)。作者 Cristina Men endez-Romero, Mustafa Sezer, Franz Winkler 都是來自德國慕尼黑寶馬集團,這不是他們第一次在IV上投稿,去年他們的Maneuver planning for highly automated vehicles(高階自動駕駛汽車的運動規(guī)劃)論文也被IV 2017收錄。從這兩篇論文可以看出該團隊近期主要在做無人駕駛汽車的運動控制的。
在高速公路上,人類駕駛員通常會不停做出適應(yīng)駕駛環(huán)境的決策行為。例如在一些靠近高速公路坡道入口處,他們會很自然地調(diào)整他們自己的行為以便進入車道的合并。
在高階自動駕駛汽車上,系統(tǒng)也應(yīng)該能做出這個決策。在這種情況下,無人車不僅要優(yōu)化自己所要達到的安全、舒適的目標,還要優(yōu)化周圍車輛讓其較為舒適的交匯。通過設(shè)計讓無人車具備足夠禮貌行為(Courtesy Behavior)可以提高公眾對自動駕駛系統(tǒng)的接受度以及改善周圍車輛的舒適度,而不會顯著降低自身的舒適度。基于此目的,該團隊提出了一種自適應(yīng)駕駛行為的新方法,整合了其他車輛的合并交匯的意圖。與其他系統(tǒng)相比,該方法通過考慮了最可能優(yōu)化方案,而且考慮了實時可能結(jié)果的預(yù)測值,實現(xiàn)了魯棒性。這種方法可以靈活地集成到不同的系統(tǒng)中。
方法與實驗
這項工作的目的是為自動駕駛系統(tǒng)提供一種禮貌行為決策,它可以識別其他交通參與者的意圖,并評估調(diào)整自己的自我策略的成本。通過將意圖預(yù)測算法集成到?jīng)Q策中來實現(xiàn)這一點。因此,通過包含所有可能的結(jié)果,可以更好地預(yù)測場景演化,從而為系統(tǒng)提供避開錯誤預(yù)測的魯棒性。決策是基于所涉及參與者的預(yù)期效率的最大化。在語義上定義了自我和沖突車輛可能采取的行為集合,如表I和表II所示。所有可能的自我行動都聚集為無合作(NC)和合作(CO)。

因此,自我車輛的行動空間被定義為Aego:= {NC,CO}。對于正常沖突,禮貌和強迫行動等行為被合并到無收益行動(NY)中,對應(yīng)于在自我車輛前面的合并,以及屈服行為(Y)。因此,沖突車輛的動作空間被定義為Acv:= {Y,NY}。笛卡爾乘積A = Aego×Acv定義聯(lián)合行動空間。目標是為自我車輛選擇一個動作,以使組合的期望效用(U(a))最大化,即:
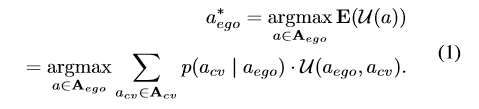
圖2顯示了系統(tǒng)的工作流程。首先,車輛通過不同的傳感器和后端接收關(guān)于環(huán)境的信息。此信息由環(huán)境模型處理。其他交通參與者的行為由預(yù)測模塊預(yù)測。然后,機動計劃模塊為當前情況選擇最佳策略,并提供可行駛且無碰撞的軌跡。該軌跡跟蹤和車輛控制器控制Actors,關(guān)閉控制回路。
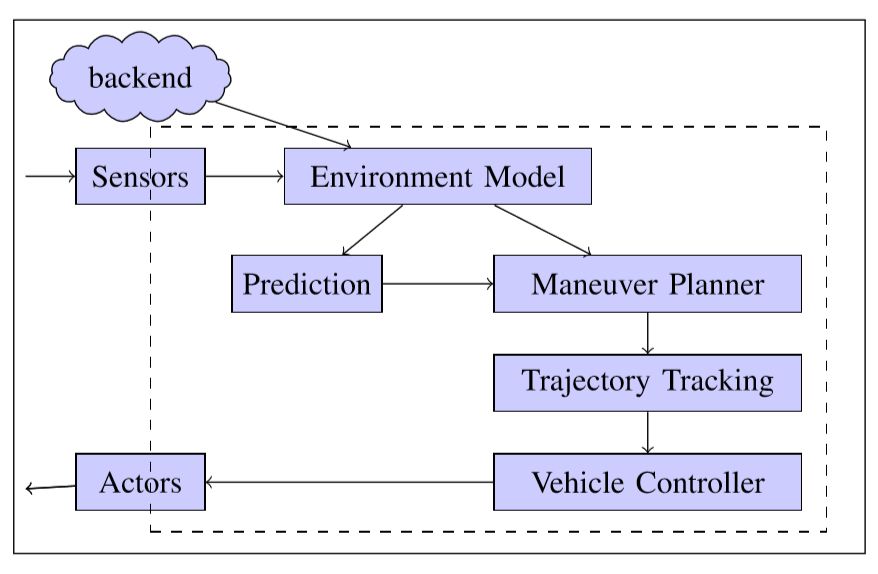
圖2:環(huán)境和車輛控制循環(huán)
該系統(tǒng)分別在仿真環(huán)境和真實測試,對不同速度不同外部交通行場景下做了對自我車輛的評估,發(fā)現(xiàn)采用禮貌行為增強駕駛策略可以提高車輛合并的舒適度,減少合并時間。此外,由于前瞻性規(guī)劃,自我車輛的安全指標也得到了改善,在現(xiàn)實世界的路測中,也印證了遠見規(guī)劃優(yōu)于快速重新規(guī)劃的優(yōu)點。對于危險情況,如合并車輛忽視自我車輛強行交匯,合作策略會選擇允許機動車以舒適的方式適應(yīng)自身,優(yōu)于無合作策略。
結(jié)論
寶馬團隊提出了一種方法,為自動車輛提供禮貌行為。在高速交匯,車輛沖突情況下,評估不同可能場景的演變。不僅考慮了其他交通參與者最可能的行為,而且考慮了與他們合作的相反行為。這些方法表明,基于通用預(yù)測算法可以完成幾個決策策略。仿真結(jié)果表明,這種禮貌行為改善了現(xiàn)有決策策略的結(jié)果。該方法可以適應(yīng)計算要求,因此具有在線能力。同時,該系統(tǒng)也進行了真實路測,來說明了實際應(yīng)用的可用性。未來重要的一步是在公共環(huán)境中密集測試該系統(tǒng)。
Second Prize:

IV 2018最佳論文獎二等獎同樣頒給了德國,第一作者Nolang Fanani博士來自德國法蘭克福歌德大學視覺傳感器與信息處理實驗室,他也是IEEE IV會議的常客,曾在2016年的IEEE IV會議上發(fā)表過一篇《使用基于傳播的跟蹤關(guān)鍵點軌跡估計》(Key pointt rajectory estimation using propagation based tracking),2017年發(fā)表過一篇《單眼視覺測距的多模態(tài)尺度估計》(Multimodal scale estimation for monocular visual odometry),而今年的大會他帶來的論文題目為CNN-based multi-frame IMO detection from amonocular camera。這篇文章介紹了一種用于從安裝在車輛上的單目攝像頭中檢測獨立移動物體(IMO)的方法。這種方法采用一個基于CNN的分類器,來生成IMO備選補丁,通過這些補丁中軌跡上的關(guān)鍵點來檢測幾何標準。通過多幀核線一致性檢查,分析IMO備選補丁內(nèi)的關(guān)鍵點。然后使用IMO備選補丁的運動信息和基于外觀的信息獲得運動標簽(IMO /靜態(tài)),他們在KITTI數(shù)據(jù)集里評估了這一方法。
Third Prize:

三等獎的論文作者 Keisuke Yoneda, Naoya Hashimoto,Ryo Yanase, Mohammad Aldibaja and Naoki Suganuma 都是來自日本金澤大學。他們的研究課題很有趣,使用76GHz全向毫米波雷達進行冬季自動駕駛的車輛定位。
雨雪天等惡劣天氣對Lidar的挑戰(zhàn)性很大,在降雪的時候,路面被遮擋無法觀察地標,有研究曾用重構(gòu)Lidar觀測信息的算法,來處理路面部分遮擋的問題,但它不適用于路面完全被覆蓋的情況,也有人提出過用三維點云圖,利用周圍建筑物特征定位方法,但是路邊的形狀會在降雪期間發(fā)生變化,因此對下雪天并不是一種有效的方法。然而MWR可用作傳感器,以在降雪期間穩(wěn)健地觀察周圍物體。
該獲獎?wù)撐慕榻B了基于76GHz MWR(毫米波雷達)在降雪環(huán)境的自動駕駛自定位方法。以前,有許多基于LIDAR(光檢測和測距)的定位技術(shù)被提出用于高測量精度和對晝夜變化的魯棒性,然而,由于降雪產(chǎn)生的傳感噪聲(即環(huán)境抵抗力),它們沒有為雪情提供有效的方法。因此,本文通過對誤差傳播的不確定性進行建模,開發(fā)了基于MWR的地圖生成和實時定位方法。使用基于LIDAR的方法作為基線,對有雪和無雪條件的駕駛數(shù)據(jù)進行定量評估。實驗結(jié)果表明,無論是否存在降雪,均可獲得約0.25m的橫向均方根誤差。
MWR非常適合穿透環(huán)境。然而,由于與LIDAR相比角度方向的低分辨率,它具有稀疏觀察信息的缺點。當車道邊界被雪遮擋時,不能利用車道級定位。因此,該研究提出了一種使用76GHz MWR觀測的自定位方法,測量雪況下的性能并與基于LIDAR的方法進行比較。使用具有后處理的高精度RTK-GNSS(實時動態(tài)GNSS)執(zhí)行評估,提供厘米位置精度。本文的主要貢獻如下:通過基于MWR誤差傳播的不確定性建模來開發(fā)地圖生成和本地化;與基于LIDAR的方法作為基線相比,定量評估自身對降雪的定位。
試驗車輛
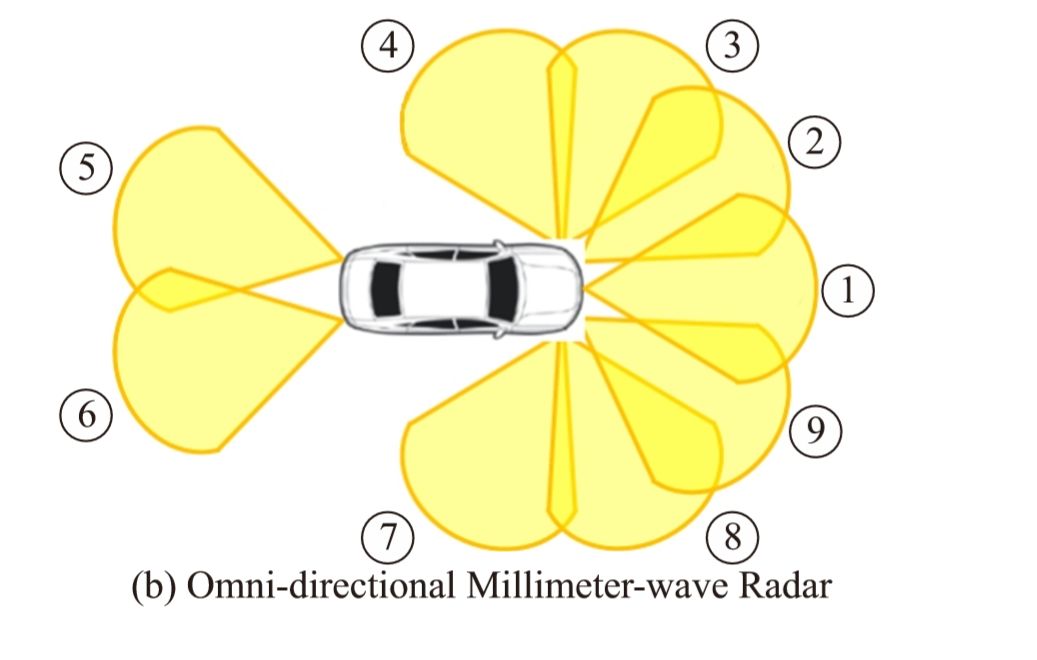
圖3(a)為實驗車輛及傳感器陣列;圖3(b)為傳感器角度
圖3(a)說明了實驗載體。該車輛配備了Applanix POS / LV220耦合 GNSS 和IMU 系統(tǒng)。它提供100Hz的位置(即緯度,經(jīng)度和高度)和方向(俯仰,偏航,滾轉(zhuǎn))。具有64個獨立橫梁的3D LIDAR Velodyne HDL-64E S2安裝在車輛上以測量環(huán)境。它在大約10Hz的頻率下測量3D全向距離。前后保險杠內(nèi)安裝了9個MWR,用于識別遠處的物體,如圖3(b)所示。它可以測量物體在20Hz時的距離,角度和相對速度,水平視野是40度。每個MWR的觀測目標數(shù)量為40。
地圖生成
A.方法
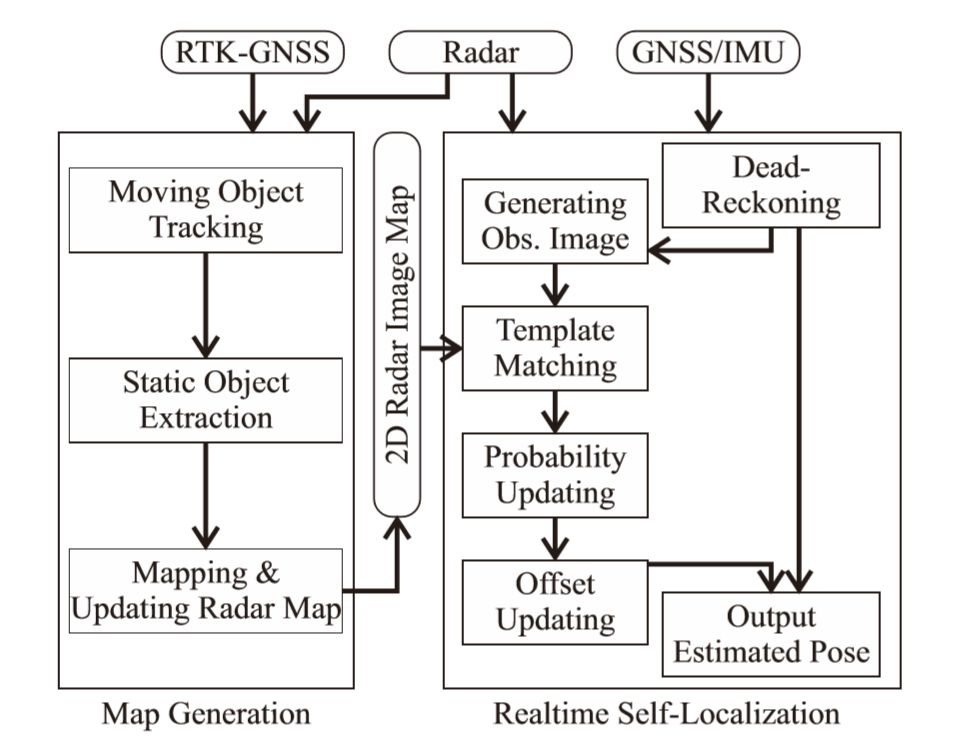
通過使用 RTK-GNSS 將 MWR 觀測與后處理映射來生成參考圖。與 LIDAR和79GHz MWR 相比,76GHzMWR 的測量角度傳感精度通常不精確。因此,有必要在映射過程中考慮測量精度。根據(jù)圖2的左側(cè),使用以下處理生成參考圖。 1)對象跟蹤:估計靜態(tài)/動態(tài)對象。 2)靜態(tài)對象提取:刪除動態(tài)對象。 3)映射:更新每個地圖像素中靜態(tài)對象的概率。
B.目標追蹤
對象跟蹤使用MWR觀測來估計靜態(tài)/動態(tài)對象。采用交互式多模型(IMM)來整合多種類型的運動來估計物體的位置,速度和加速度。恒定加速度,恒定速度和停止模型被定義為運動模型。IMM可以跟蹤周圍的動態(tài)對象,例如車輛和自行車。因此,可以忽略動態(tài)對象以生成地圖。
C.定位
使用通過刪除那些動態(tài)對象獲得的靜態(tài)對象生成參考映射。全局坐標中的觀察點被轉(zhuǎn)換為2D圖像坐標并映射到相應(yīng)的像素。為了考慮MWR的低感測精度,基于觀測誤差傳播,使用協(xié)方差矩陣P來定義存在似然。圖4(a)表示映射過程的一個例子。通過產(chǎn)生的垂直于傳感器的照射方向的方差來計算存在似然。
圖4 無人車地圖生成
通過在似然分布的相應(yīng)區(qū)域中的積分來獲得每個像素的似然值。然后基于似然值更新存在概率。圖4(b)顯示了獲得的圖像映射。每個像素都具有關(guān)于緯度和長度的信息。通過與基于LIDAR的地圖進行比較,如圖4(c)所示,所獲得的地圖包括人行道上的物體,例如電線桿和護欄。而題目中提到的自定位的方法,是利用航位推算來更新估計位置,結(jié)合似然函數(shù),用觀察圖像和地圖圖像來匹配實際應(yīng)用地圖。
結(jié)論
該論文采用76GHz MWR提出了自定位方法。實驗結(jié)果表明,無論是否存在降雪,都可以獲得約0.25m的橫向RMS誤差。雖然獲得的位置精度仍不足以進行自動駕駛,但通過將其與基于LIDAR的方法一起使用,可以確保安全性。例如,在通過隧道后突然降雪的場景中,可以預(yù)期所提出的方法估計位置,直到車輛自動到達安全區(qū)域。將來,通過使用79GHz MWR獲取更高分辨率的數(shù)據(jù),可以獲得穩(wěn)定性和定位精度的進一步提高。
-
無人駕駛
+關(guān)注
關(guān)注
99文章
4176瀏覽量
123570 -
自動駕駛
+關(guān)注
關(guān)注
789文章
14321瀏覽量
170659
原文標題:IV 2018最佳論文獎丨寶馬公司研究自動駕駛汽車在高速交互處的“禮貌行為”獲最佳
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
【話題】特斯拉首起自動駕駛致命車禍,自動駕駛的冬天來了?
自動駕駛真的會來嗎?
程序教會無人車更“懂禮貌”
UPS電源設(shè)備監(jiān)控在高速公路中的作用
日本將在高速公路測試自動駕駛汽車
浙江建超級高速公路支持自動駕駛實現(xiàn)新能源供給設(shè)施全覆蓋





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論