") 低功耗目標(biāo)檢測系統(tǒng)設(shè)計(jì)挑戰(zhàn)賽:中科院、清華分獲GPU與FPGA組冠軍
低功耗目標(biāo)檢測系統(tǒng)設(shè)計(jì)挑戰(zhàn)賽:中科院、清華分獲GPU與FPGA組冠軍
2018 年 6 月 28 日,由電子自動化設(shè)計(jì)頂級會議DAC' 2018主辦的「低功耗目標(biāo)檢測系統(tǒng)設(shè)計(jì)挑戰(zhàn)賽」于加州舊金山于落下帷幕。來自中科院計(jì)算所的 ICT-CAS 團(tuán)隊(duì)和來自清華大學(xué)的 TGIIF 團(tuán)隊(duì)在全球 114 支參賽隊(duì)伍中脫穎而出,分獲 GPU 組和 FPGA 組的冠軍。本屆比賽旨在為無人機(jī)設(shè)計(jì)高精度且高能效的物體檢測系統(tǒng),以滿足實(shí)際復(fù)雜場景的需要。比賽任務(wù)極具挑戰(zhàn)性,參賽設(shè)計(jì)需要考慮小物體及被遮蔽物體檢測,需要區(qū)分同場景多個相似目標(biāo),也需要考慮檢測速度及功耗等多方面因素。參賽隊(duì)伍來自清華大學(xué)、北京大學(xué)、中科院、UIUC、CMU、IBM、Cadence 等全球多個優(yōu)秀科研機(jī)構(gòu)。
轉(zhuǎn)自機(jī)器之心
無人機(jī)在工業(yè)、農(nóng)業(yè)、軍事及消費(fèi)級市場均有如土地測繪、巡檢監(jiān)測、物資配送、災(zāi)后救援等重要作用。其中,實(shí)現(xiàn)高精度且高能效物體檢測是開展所有無人機(jī)任務(wù)的基本要素,也是本領(lǐng)域急需提高的方向。由于航拍數(shù)據(jù)集(無人機(jī)視角)的缺失,進(jìn)一步提升無人機(jī)物體檢測系統(tǒng)變得更加困難。
在這樣的背景下,圣母大學(xué)的史弋宇教授,匹茲堡大學(xué)的胡京通教授,香港城市大學(xué)的余備教授和 Cognite Ventures 公司的 CEO Christopher Rowen 發(fā)起「低功耗目標(biāo)檢測系統(tǒng)設(shè)計(jì)挑戰(zhàn)賽」,并在 DAC' 2018 成功舉辦。該比賽由 Nvidia、Xilinx 和 DJI 大疆創(chuàng)新贊助,由圣母大學(xué)博士后徐小維和匹茲堡大學(xué)博士生張鑫燚進(jìn)行評測。Nvidia 和 Xilinx 分別為 GPU 和 FPGA 組的參賽隊(duì)伍提供免費(fèi)的嵌入式計(jì)算設(shè)備 TX2 GPU 和 PYNQ Z-1 FPGA。大疆創(chuàng)新為比賽提供了高達(dá) 150k 份由無人機(jī)在實(shí)際環(huán)境中采集的數(shù)據(jù)并提供了準(zhǔn)確標(biāo)注。
比賽中使用到的兩種硬件平臺: TX2 GPU(左)和 PYNQ Z-1 FPGA(右)
比賽從 2017 年 10 月 16 日正式開始,于 2018 年 5 月 28 日結(jié)束,共吸引 114 支來自全球多個科研機(jī)構(gòu)的隊(duì)伍參加。其中,53 支隊(duì)伍參與 GPU 組比賽,61 支隊(duì)伍參與 FPGA 組比賽。最終,兩個組別前三名的隊(duì)伍將被邀請至舊金山,在DAC'2018 上接受頒獎。同時,獲獎隊(duì)伍將能在大會上分享他們的設(shè)計(jì)并進(jìn)行現(xiàn)場展示。
挑戰(zhàn) 1: 小物體及遮蔽物檢測
由于所有圖片均在無人機(jī)視角下拍攝,大量圖片中的待檢測物體都非常小,且有很大的概率被樹木和建筑物遮擋。這些物體本身的特征在如此小的尺度下會大大提升檢測的難度。
小物體檢測:綠色框?qū)?yīng)行駛中的汽車為檢測目標(biāo)
挑戰(zhàn) 2: 同一物體檢測
與傳統(tǒng)的物體檢測不一樣,本次比賽需要參賽隊(duì)伍檢測同一個物體。在無人機(jī)跟隨應(yīng)用中,無人機(jī)需要準(zhǔn)確地檢測出指定物體(如無人機(jī)操控者、車輛、動物等)并進(jìn)行跟隨飛行。當(dāng)場景出現(xiàn)多個相似物體時,無人機(jī)也不能跟丟或跟錯對象。此應(yīng)用給物體檢測帶來了新的挑戰(zhàn)。
特定行人檢測:綠色框?qū)?yīng)的是正確的檢測目標(biāo),藍(lán)色和紅色狂均對應(yīng)錯誤的行人。
挑戰(zhàn) 3:高精度 vs 低功耗
比賽采用的評價(jià)指標(biāo)是精度,速度和能耗的結(jié)合(評分細(xì)則詳見 1)。考慮到 GPU 組及 FPGA 組使用了不同的計(jì)算能力硬件設(shè)備,比賽對檢測速度提出了不同的要求。其中 GPU 設(shè)計(jì)需運(yùn)行至 20 FPS,F(xiàn)PGA 設(shè)計(jì)需達(dá)到 5 FPS。
GPU 組前三強(qiáng)
GPU 組的前三名分別是中科院計(jì)算所的 ICT-CAS 團(tuán)隊(duì),浙江大學(xué)的 DeepZ 團(tuán)隊(duì)和山東大學(xué)的 SDU-Legend 團(tuán)隊(duì)。三個隊(duì)伍均采用了深度學(xué)習(xí)完成比賽,也都采用 Yolo 神經(jīng)網(wǎng)絡(luò)作為他們的基礎(chǔ)設(shè)計(jì)。

GPU 組第一名: ICT-CAS
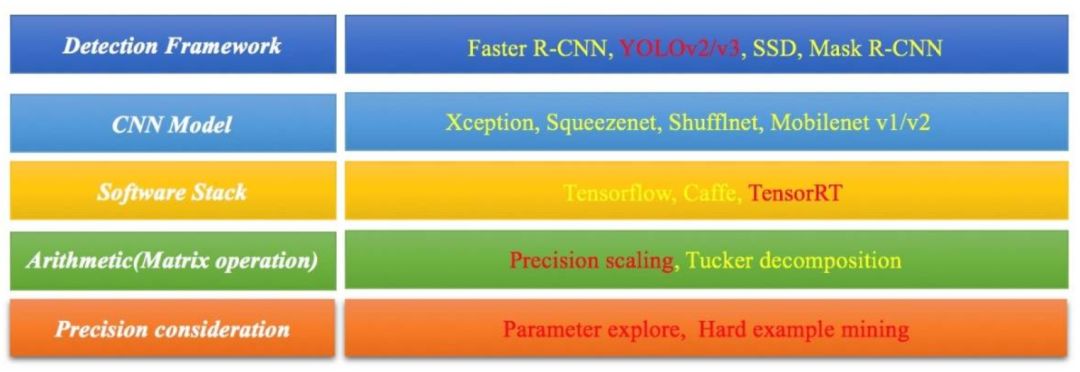
ICT-CAS 團(tuán)隊(duì)使用了 feature extractor, tucker decomposition and precision scaling 相關(guān)技術(shù)。在每一種具體的方案中嘗試了多種技術(shù)記憶組合以減少計(jì)算和內(nèi)存消耗。在計(jì)算中采用了半精度(16bits)進(jìn)行計(jì)算并使用 TensorRT 來提高計(jì)算速度。
GPU 組第二名: DeepZ
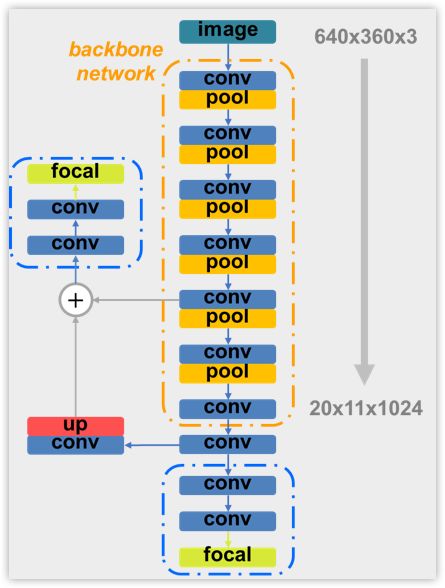
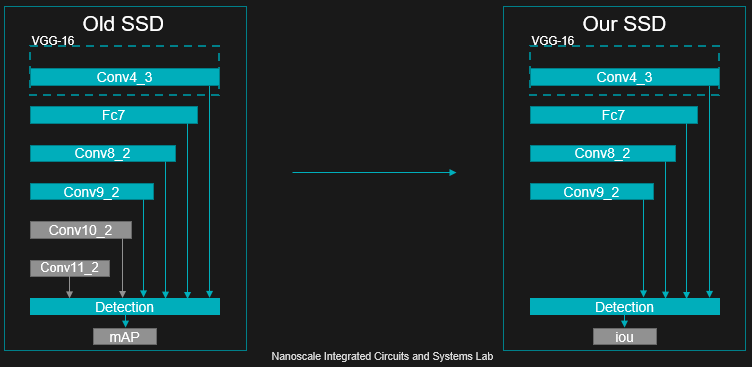
DeepZ 團(tuán)隊(duì)使用 Yolo-v2 作為骨干網(wǎng)絡(luò)進(jìn)行特征提取和檢測。為了應(yīng)對較小物體檢測的問題,該團(tuán)隊(duì)使用了 Feature Pyramid Network 來獲得上下文相關(guān)的特征。同時,focal loss function 的引入來緩解單一物體檢測與多個候選框的不平衡問題。該團(tuán)隊(duì) 對 Yolo-v2 網(wǎng)絡(luò)進(jìn)行了一定的改進(jìn),改進(jìn)后的網(wǎng)絡(luò)結(jié)構(gòu)如下圖所示。
GPU 組第三名: SDU-Legend
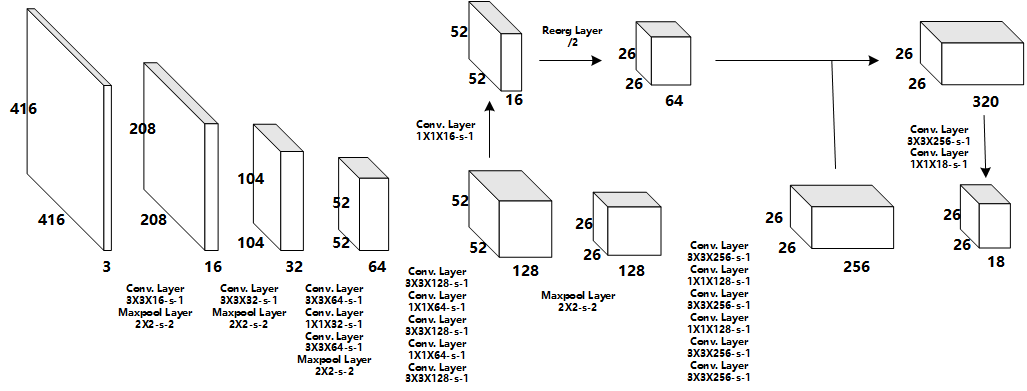
SDU-Legend 團(tuán)隊(duì)基于 Yolo v-2 進(jìn)行優(yōu)化。首先,該團(tuán)隊(duì)將 Yolo v-2 網(wǎng)絡(luò)由 32 層刪減為 27 層。其次,為了滿足檢測小目標(biāo)的要求,該團(tuán)隊(duì)降低了下采樣率。在體系層次,該團(tuán)隊(duì)也做了一些優(yōu)化:將網(wǎng)絡(luò)最后兩層的計(jì)算放在 CPU 上進(jìn)行。該團(tuán)隊(duì)實(shí)現(xiàn)了 16bits 的半精度計(jì)算來進(jìn)一步提升計(jì)算速度。
FPGA 組前三強(qiáng)
FPGA 組的冠軍是來自清華大學(xué)的 TGIIF 團(tuán)隊(duì),亞軍是蘇黎世聯(lián)邦理工大學(xué)的 SystemsETHZ,季軍來自 UIUC 的 iSmart2 團(tuán)隊(duì)。這三支參賽隊(duì)伍分別在 FPGA 上部署了 SSD,SqueezeNet 和 MobileNet 神經(jīng)網(wǎng)絡(luò),完成了比賽要求的物體檢測任務(wù)。
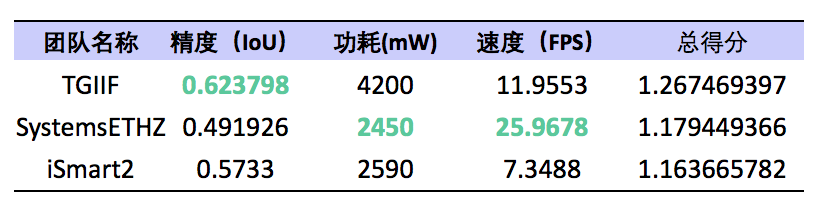
FPGA 組第一名: TGIIF
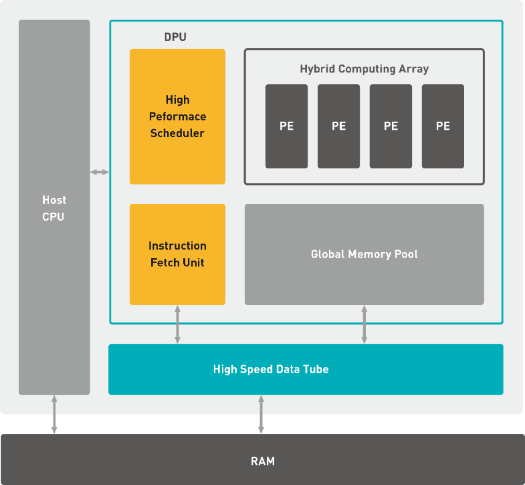
TGIIF 團(tuán)隊(duì)在采用了深鑒科技的硬件加速器架構(gòu) DPU、全棧式工具鏈 DNNDK 和深度壓縮技術(shù)的基礎(chǔ)上,從算法、軟件和硬件對整個目標(biāo)檢測系統(tǒng)進(jìn)行了全棧式的協(xié)同優(yōu)化。通過采用硬件友好的 SSD 網(wǎng)絡(luò)和多線程優(yōu)化技術(shù),結(jié)合深度壓縮和定點(diǎn)訓(xùn)練,在保證識別精度的前提下,滿足了低功耗和實(shí)時性的要求。
FPGA 組第二名: SystemsETHZ
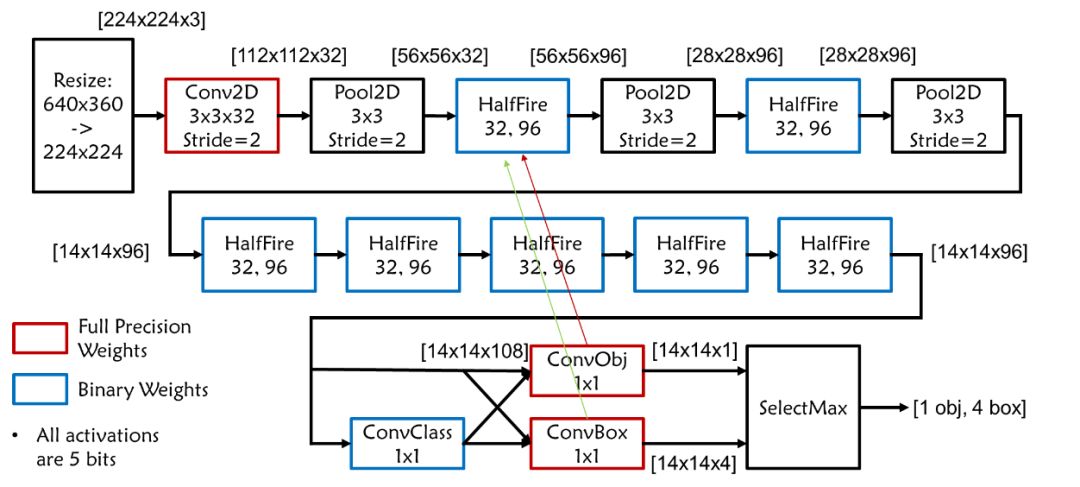
SystemsETHZ 團(tuán)隊(duì)使用低量化網(wǎng)絡(luò)進(jìn)行物體檢測。特別的該團(tuán)隊(duì)采用 squeezenet 為基礎(chǔ)進(jìn)行設(shè)計(jì),并將網(wǎng)絡(luò)層數(shù)修改為 18 層。在具體的實(shí)現(xiàn)中,該團(tuán)隊(duì)采用了 folded computing 的方式來配置多路復(fù)用器和多路輸出選擇器進(jìn)而實(shí)現(xiàn)神經(jīng)網(wǎng)絡(luò)不同階段的計(jì)算。該團(tuán)隊(duì)使用一個 DMA 引擎實(shí)現(xiàn) CPU 和 FPGA 間的數(shù)據(jù)傳輸。
FPGA 組第三名: iSmart2
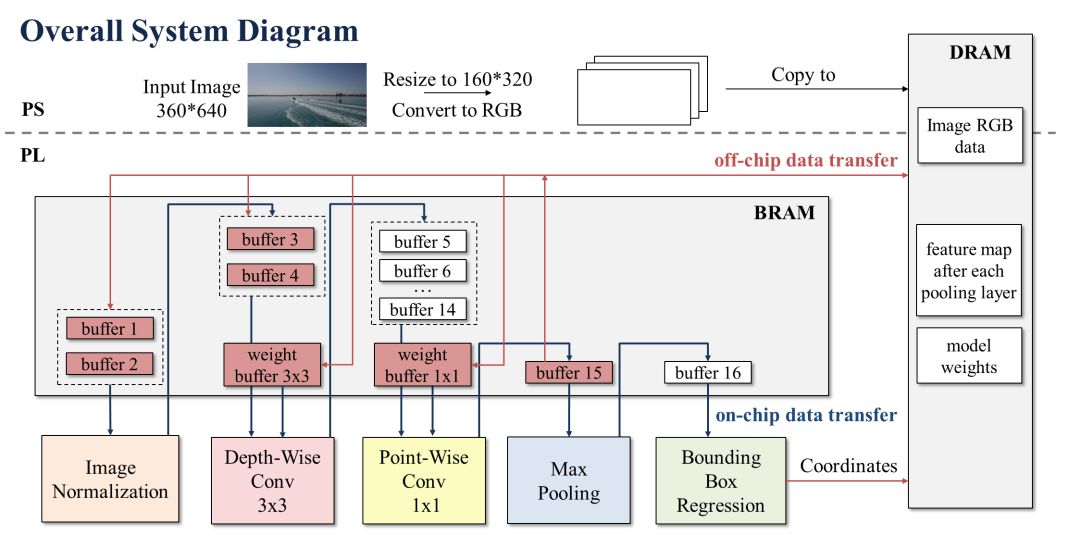
iSmart2 組采用以 Mobilenet 為基礎(chǔ)的輕量化網(wǎng)絡(luò)設(shè)計(jì),共 12 層。網(wǎng)絡(luò)包含 depth-wise 3x3 卷積層,傳統(tǒng) 1x1 卷積層和 max pooling 層,并采用簡化的 Yolo 后端進(jìn)行物體檢測。在硬件實(shí)現(xiàn)上,該團(tuán)隊(duì)采用基于模塊(IP)復(fù)用的結(jié)構(gòu),讓相同種類的網(wǎng)絡(luò)層復(fù)用同一個模塊以節(jié)約硬件資源。此外,該團(tuán)隊(duì)將每層特征圖分割成大小相同的數(shù)據(jù)塊,以數(shù)據(jù)塊為單位進(jìn)行計(jì)算,實(shí)現(xiàn)了數(shù)據(jù)塊之間的細(xì)粒度流水線結(jié)構(gòu),以縮短圖片的處理延時。
-
gpu
+關(guān)注
關(guān)注
28文章
4916瀏覽量
130726 -
低功耗
+關(guān)注
關(guān)注
10文章
2747瀏覽量
104578 -
無人機(jī)
+關(guān)注
關(guān)注
230文章
10757瀏覽量
185710
原文標(biāo)題:低功耗目標(biāo)檢測系統(tǒng)挑戰(zhàn)賽落幕:中科院、清華分獲GPU與FPGA組冠軍
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
中科曙光助力中科院高能物理研究所打造溪悟大模型
e絡(luò)盟社區(qū)聯(lián)合 TDK 發(fā)起超聲波傳感器挑戰(zhàn)賽

平頭哥半導(dǎo)體亮相AICAS 2025挑戰(zhàn)賽技術(shù)研討會
微軟AI開發(fā)者挑戰(zhàn)賽即將開啟
芯華章持續(xù)助力EDA精英挑戰(zhàn)賽
EDA精英挑戰(zhàn)賽賽果公布!思爾芯“戰(zhàn)隊(duì)”薪火相承斬獲“麒麟杯”

e絡(luò)盟社區(qū)攜手恩智浦發(fā)起智能空間樓宇自動化挑戰(zhàn)賽

2024年ICPC與華為挑戰(zhàn)賽冠軍杯圓滿落幕
PI助力aCentauri車隊(duì)在太陽能車挑戰(zhàn)賽中大放異彩
50萬獎金池!開放原子大賽——第二屆OpenHarmony創(chuàng)新應(yīng)用挑戰(zhàn)賽正式啟動
NVIDIA為AI城市挑戰(zhàn)賽構(gòu)建合成數(shù)據(jù)集
【龍芯2K0300蜂鳥板試用】1 龍芯中科必知3件事
AI4Science黑客松光子計(jì)算挑戰(zhàn)賽成功舉辦
思爾芯賽題正式發(fā)布,邀你共戰(zhàn)EDA精英挑戰(zhàn)賽!
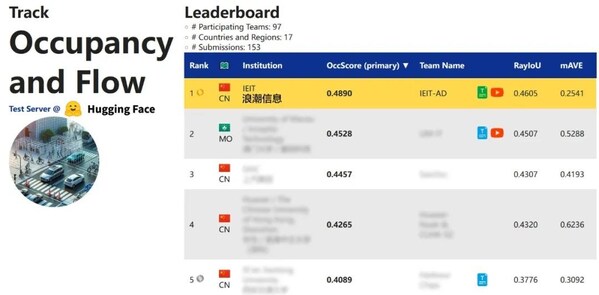
浪潮信息獲CVPR2024自動駕駛挑戰(zhàn)賽"Occupancy& Flow"冠軍





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論