") 駕駛輔助技術(shù)的一些常見功能進(jìn)行介紹
駕駛輔助技術(shù)的一些常見功能進(jìn)行介紹

根據(jù)工業(yè)和信息化部、公安部、交通運(yùn)輸部等三部委共同發(fā)布的《智能網(wǎng)聯(lián)汽車道路測試管理規(guī)范(試行)》,自動(dòng)駕駛汽車是指搭載先進(jìn)的車載傳感器、控制器、執(zhí)行器等裝置,并融合現(xiàn)代通信與網(wǎng)絡(luò)技術(shù),實(shí)現(xiàn)車與人、車、路、云端等智能信息交換、共享,具備復(fù)雜環(huán)境感知、智能決策、協(xié)同控制等功能,可實(shí)現(xiàn)安全、高效、舒適、節(jié)能行駛,并最終可實(shí)現(xiàn)替代人來操作的新一代汽車。高級駕駛輔助系統(tǒng)是實(shí)現(xiàn)自動(dòng)駕駛的重要基礎(chǔ),本文就駕駛輔助技術(shù)的一些常見功能進(jìn)行介紹。
1自適應(yīng)巡航控制
自適應(yīng)巡航控制(ACC)是一種高級駕駛輔助系統(tǒng),該系統(tǒng)通過距離傳感器實(shí)時(shí)測量與前車的距離和相對速度,計(jì)算出合適的油門或剎車控制量并進(jìn)行自動(dòng)調(diào)節(jié),從而實(shí)現(xiàn)本車的車速控制以及與前車的車距控制。在無前車的情況下,ACC系統(tǒng)將根據(jù)預(yù)設(shè)的行駛速度,通過控制發(fā)動(dòng)機(jī)油門開度保持定速行駛。
ACC系統(tǒng)在機(jī)動(dòng)車車速為40-160公里/小時(shí)的范圍內(nèi)起作用,其最大的剎車減速度約為0.5g。近年來,針對城市交通中機(jī)動(dòng)車低速行駛和頻繁起停等情況,ACC系統(tǒng)功能現(xiàn)已包括起停控制、避撞控制等。
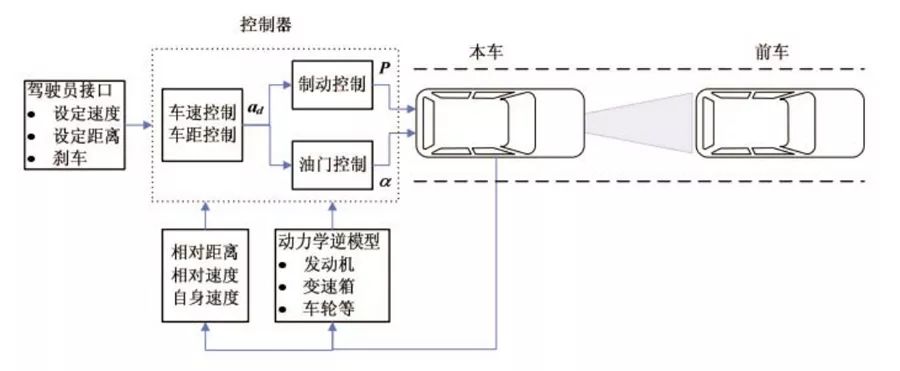
圖1 機(jī)動(dòng)車自適應(yīng)巡航控制原理
機(jī)動(dòng)車全速度范圍內(nèi)的自適應(yīng)巡航控制可以看成是一類存在內(nèi)部動(dòng)力學(xué)模型不確定性和外部環(huán)境干擾的非線性系統(tǒng)的最優(yōu)跟蹤控制問題,近年來引起了國內(nèi)外研究者的廣泛關(guān)注。PID方法、模糊邏輯、模型預(yù)測控制、滑模控制、神經(jīng)網(wǎng)絡(luò)、最優(yōu)控制等控制理論方法都被應(yīng)用于ACC系統(tǒng)控制器的設(shè)計(jì)中。
2 自動(dòng)泊車
自動(dòng)泊車系統(tǒng)主要由感知單元、中央控制器、轉(zhuǎn)向執(zhí)行機(jī)構(gòu)和人-機(jī)交互系統(tǒng)組成。
★感知單元通過車位檢測傳感器、避障保護(hù)傳感器、輪速傳感器、陀螺儀、檔位傳感器等單元實(shí)現(xiàn)對環(huán)境信息和機(jī)動(dòng)車自身運(yùn)動(dòng)狀態(tài)的感知,泊車系統(tǒng)的中央控制單元需要在感知信息已知的前提下對機(jī)動(dòng)車進(jìn)行運(yùn)動(dòng)控制;
★中央控制單元主要分析處理感知單元獲取的環(huán)境信息以及機(jī)動(dòng)車泊車運(yùn)動(dòng)控制。在泊車過程中,泊車系統(tǒng)控制器實(shí)時(shí)接收并處理機(jī)動(dòng)車避障傳感器輸出的信息,當(dāng)機(jī)動(dòng)車與周圍物體相對距離小于設(shè)定安全值時(shí),泊車系統(tǒng)控制器將采取合理的機(jī)動(dòng)車運(yùn)動(dòng)控制;
★轉(zhuǎn)向執(zhí)行機(jī)構(gòu)由轉(zhuǎn)向系統(tǒng)、轉(zhuǎn)向驅(qū)動(dòng)電機(jī)、轉(zhuǎn)向電機(jī)控制器、轉(zhuǎn)向柱轉(zhuǎn)角傳感器等單元組成,轉(zhuǎn)向執(zhí)行機(jī)構(gòu)接收中央控制單元發(fā)出的轉(zhuǎn)向指令后執(zhí)行轉(zhuǎn)向操作。
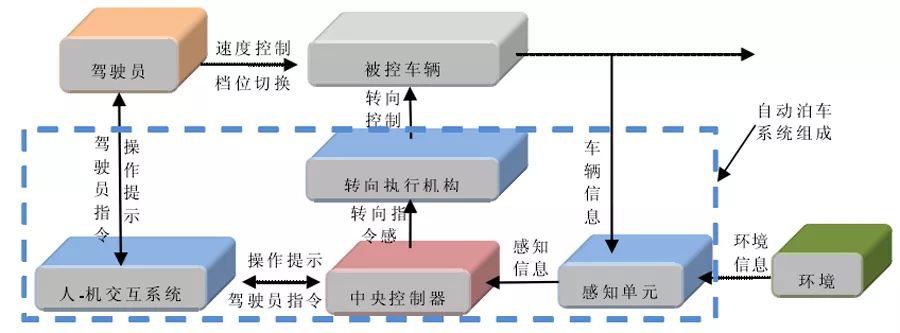
圖2 自動(dòng)泊車系統(tǒng)結(jié)構(gòu)組成示意圖
3 電子穩(wěn)定控制
電子穩(wěn)定控制(ESC),又稱為電子穩(wěn)定程序(ESP)或動(dòng)態(tài)穩(wěn)定控制(DSC),是一種檢測并抑制機(jī)動(dòng)車輪胎附著力降低的計(jì)算機(jī)技術(shù)。當(dāng)ESC系統(tǒng)檢測到機(jī)動(dòng)車車輪失去控制時(shí)將自動(dòng)制動(dòng),且這種制動(dòng)是針對特定車輪單獨(dú)進(jìn)行。例如當(dāng)機(jī)動(dòng)車轉(zhuǎn)向過度時(shí),外側(cè)前輪將被制動(dòng);而機(jī)動(dòng)車轉(zhuǎn)向不足時(shí),內(nèi)側(cè)后輪將被制動(dòng)。某些ESC系統(tǒng)還會限制發(fā)動(dòng)機(jī)功率直至重新穩(wěn)定控制機(jī)動(dòng)車。
運(yùn)行過程中,ESC系統(tǒng)會持續(xù)監(jiān)控轉(zhuǎn)向裝置和機(jī)動(dòng)車行駛方向,實(shí)時(shí)比較駕駛?cè)似谕霓D(zhuǎn)向角度(根據(jù)方向盤角度確定)和機(jī)動(dòng)車實(shí)際行駛方向(根據(jù)測量的機(jī)動(dòng)車橫向加速度、車身傾角和各車輪速度計(jì)算)的差異。當(dāng)機(jī)動(dòng)車前進(jìn)方向和駕駛?cè)似谕较虿煌瑫r(shí),ESC系統(tǒng)則開始發(fā)揮作用。ESC系統(tǒng)首先會對機(jī)動(dòng)車打滑的方向進(jìn)行評估,然后進(jìn)行不對稱的車輪制動(dòng),對機(jī)動(dòng)車切向產(chǎn)生扭矩,從而抵消滑動(dòng)的影響并將機(jī)動(dòng)車重新帶回駕駛?cè)艘蟮男旭偡较颉?/p>
ESC系統(tǒng)可以在任何路面上起作用,包括碎石道路和冰面。和人為控制相比,ESC系統(tǒng)對打滑具有更快的反應(yīng)速度和更有效的糾正能力,甚至在駕駛?cè)松形匆庾R到控制力減弱的情況下ESC系統(tǒng)就已經(jīng)開始發(fā)揮作用。
4車道偏離警示
車道偏離警示系統(tǒng)的主要功能是在機(jī)動(dòng)車將要駛出車道時(shí)警示駕駛?cè)耍軌驕p少因駕駛?cè)耸д`、分心以及疲勞引起的交通事故,該系統(tǒng)一般在高速公路或快速路上發(fā)揮作用。
車道偏離警示系統(tǒng)主要有兩類:一是車道偏離報(bào)警系統(tǒng)(LDW),當(dāng)機(jī)動(dòng)車偏離其車道時(shí),系統(tǒng)將通過視、聽覺或者震動(dòng)進(jìn)行警示;二是車道保持系統(tǒng)(LKS),車道偏離報(bào)警系統(tǒng)在警示駕駛?cè)撕螅赳{駛?cè)藳]有作出相應(yīng)操作,車道保持系統(tǒng)將自動(dòng)采取措施保證機(jī)動(dòng)車行駛在車道內(nèi)。當(dāng)駕駛?cè)嗽谧兊狼爸鲃?dòng)給出轉(zhuǎn)向信號時(shí),系統(tǒng)將不起作用。
車道偏離警示系統(tǒng)采用視覺傳感器(攝像頭)、激光傳感器和紅外傳感器。在軟件核心算法上,車道偏離警示系統(tǒng)主要采用霍夫變換和邊緣檢測等圖像處理方法來實(shí)時(shí)檢測攝像頭拍攝的道路視頻中的車道線。
圖3 車道線檢測的圖像處理方法
5碰撞避免
碰撞避免系統(tǒng)是一種減輕碰撞嚴(yán)重性的主動(dòng)安全系統(tǒng),又稱為避撞系統(tǒng)、前向碰撞警示系統(tǒng)、碰撞減輕系統(tǒng)等。該系統(tǒng)使用微波雷達(dá)、激光雷達(dá)以及攝像頭來檢測碰撞先兆。一旦檢測到危險(xiǎn),該系統(tǒng)將進(jìn)行警示,若即將發(fā)生碰撞,系統(tǒng)將自動(dòng)采取措施,如制動(dòng)或變向等。按防撞對象分類,汽車碰撞避免系統(tǒng)可分為行人防撞系統(tǒng)和機(jī)動(dòng)車防撞系統(tǒng)。
★行人防撞系統(tǒng)的核心技術(shù)是行人檢測,行人檢測常用的傳感器包括可見光和紅外光的視覺傳感器,以及依靠波形反彈的反射傳感器等。視覺傳感器能夠捕捉豐富的場景信息,但涉及龐大的識別計(jì)算量;雷達(dá)能夠獲得行人距離等準(zhǔn)確信息,但分辨率往往有限,因此這兩類傳感器是互補(bǔ)的,通過融合可以達(dá)到魯棒性更好的檢測結(jié)果。
★機(jī)動(dòng)車防撞系統(tǒng)最主要的判斷依據(jù)是兩車之間的相對距離和相對速度信息。按探測方向分類,機(jī)動(dòng)車上使用的雷達(dá)可以分為倒車?yán)走_(dá)和前向雷達(dá)。倒車?yán)走_(dá)探測距離較短,一般使用超聲波或紅外探測兩種方式;前向雷達(dá)由于車速快,要求探測距離長,一般使用激光雷達(dá)。
6.自動(dòng)編隊(duì)
自動(dòng)編隊(duì)是通過電子或機(jī)械手段實(shí)現(xiàn)自動(dòng)駕駛汽車自動(dòng)組隊(duì),且車隊(duì)內(nèi)所有車輛間距縮小并同步實(shí)現(xiàn)加速或制動(dòng)。基于這一概念,研究者們提出了高速公路智能交通自動(dòng)化系統(tǒng),在該系統(tǒng)內(nèi),自動(dòng)駕駛汽車可以自主組成一個(gè)8至25輛車的車隊(duì)。
在這一概念化的方案中,高速公路路面上已經(jīng)鋪設(shè)了由磁化的不銹鋼釘組成的車道,自動(dòng)駕駛汽車通過感知鋼釘來計(jì)算車速并自我定位在車道中央。磁化的鋼釘可以是磁北極朝上或者磁南極朝上,因此可以通過鋼釘?shù)拇判皂樞騺硖峁┎糠值缆沸畔ⅰT谶@種公路上,自動(dòng)駕駛汽車通過自動(dòng)轉(zhuǎn)向和速度控制自動(dòng)組織車隊(duì),車隊(duì)內(nèi)車輛間距減小后,行駛過程中空氣阻力也將大大減小。針對卡車的自動(dòng)編隊(duì)研究表明牽引車使用自動(dòng)編隊(duì)功能可以減少能源消耗并提高電動(dòng)牽引車的使用靈活性。
-
機(jī)動(dòng)車
+關(guān)注
關(guān)注
0文章
68瀏覽量
18095 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14308瀏覽量
170551
原文標(biāo)題:自適應(yīng)巡航 自動(dòng)泊車 車道偏離 碰撞預(yù)警 自動(dòng)駕駛之輔助駕駛技術(shù)簡介
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
從先進(jìn)駕駛輔助系統(tǒng)到無人駕駛
高級輔助駕駛ADAS技術(shù)
精品推薦:ADAS電路設(shè)計(jì)集錦,學(xué)一招受用十年!
駕駛輔助技術(shù)的一些常見功能介紹
介紹一些常見的匯編語句
高級駕駛員輔助系統(tǒng)(ADAS)解決方案
簡要介紹高級輔助駕駛系統(tǒng)ADAS的專利技術(shù)
關(guān)于汽車駕駛輔助技術(shù)的一些常見功能介紹
介紹駕駛輔助技術(shù)的一些常見功能

實(shí)測對比特斯拉“Autopolit”輔助駕駛功能

介紹一些大功率IGBT模塊應(yīng)用中的一些技術(shù)
常見的輔助駕駛功能都有哪些
如何使用sizefield功能進(jìn)行CFD網(wǎng)格細(xì)化





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論