") Arduino超聲波避障小車DIY:智能避障小車附帶特殊技能
Arduino超聲波避障小車DIY:智能避障小車附帶特殊技能
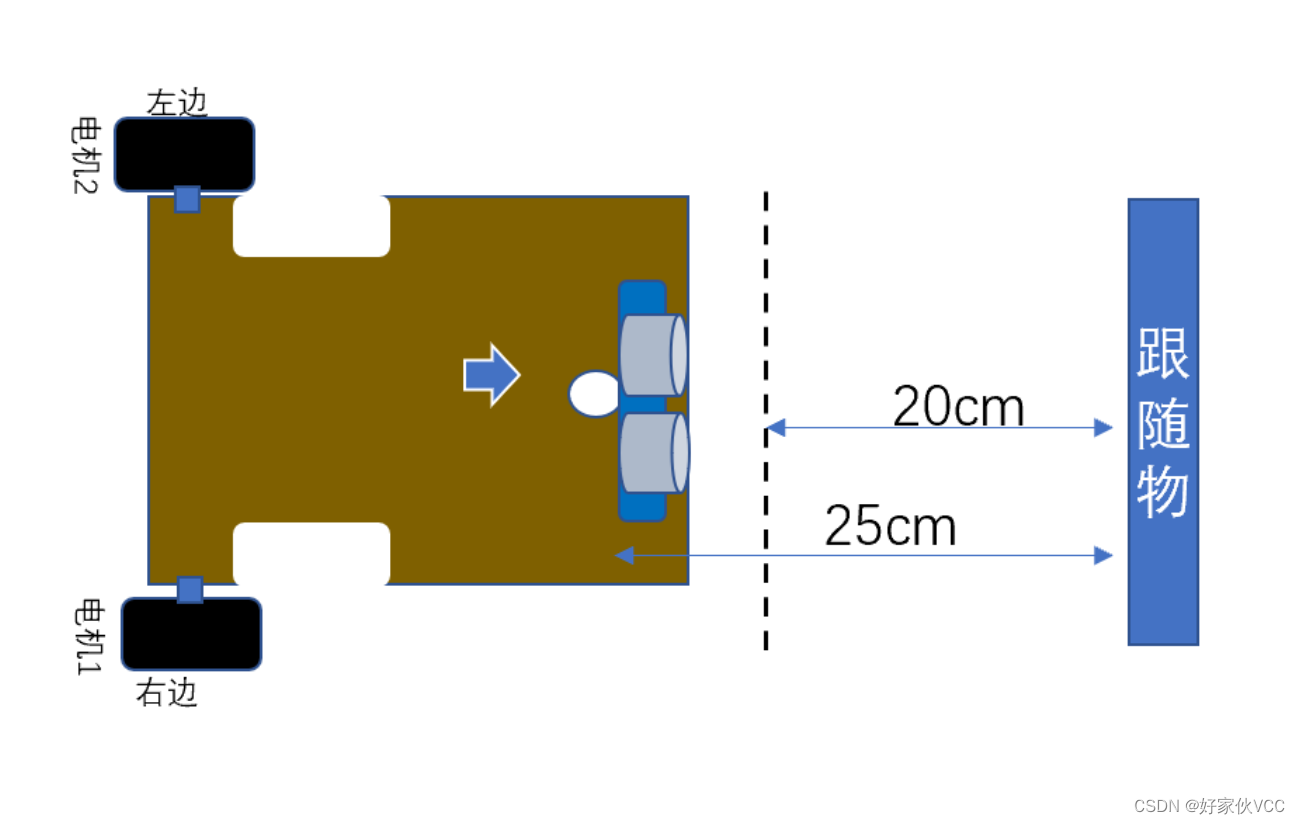
這是在藍(lán)牙串口返回的小車工作時(shí)的數(shù)據(jù),前進(jìn)時(shí)返回前方距離和“Moving advance”即正在前進(jìn),當(dāng)前方距離小于20cm的時(shí)候停車,返回“Stopped”,然后轉(zhuǎn)頭,同時(shí)返回左右方向的距離,然后返回判斷出的結(jié)果,左轉(zhuǎn)右轉(zhuǎn)或者掉頭
關(guān)于返回?cái)?shù)據(jù),這里有高清無碼大圖
兩臺(tái)小車合影,哈哈,下面開始制作過程,沒有每個(gè)步驟都拍照,只有些大概,大家見諒哈~
這是底盤剛剛裝好的時(shí)候,用航模接收機(jī)測(cè)試底盤是否正常工作
動(dòng)力部分為了簡(jiǎn)(tou)化(lan)和美觀,采用了兩個(gè)360度連續(xù)旋轉(zhuǎn)舵機(jī),優(yōu)點(diǎn)是不需要獨(dú)立的電機(jī)驅(qū)動(dòng),缺點(diǎn)是小貴一些
結(jié)構(gòu)方面還是智能小車的萬年經(jīng)典結(jié)構(gòu),兩個(gè)驅(qū)動(dòng)輪加一個(gè)萬向輪
本次制作的小車動(dòng)力源,做過360度旋轉(zhuǎn)改裝的大號(hào)舵機(jī),其實(shí)相當(dāng)于一個(gè)給pwm信號(hào)就能調(diào)速的直流減速電機(jī),省去了電機(jī)驅(qū)動(dòng)的麻煩
測(cè)試超聲波模塊中
測(cè)試超聲波模塊的無聊間隙無意中看到這個(gè),于是練就了小車的特殊技能,至于是什么技能此處先保密哈哈
初步安裝完成的小車底盤,還沒有加上超聲波模塊和旋轉(zhuǎn)舵機(jī)
舵機(jī)還沒到,閑余無聊又寫了個(gè)藍(lán)牙遙控小車的程序過過癮,這里沒拍視頻,很簡(jiǎn)單就是串口發(fā)送WASD分別對(duì)應(yīng)小車的前進(jìn)左轉(zhuǎn)后退右轉(zhuǎn)
打孔安裝舵機(jī)ing
至此硬件部分基本安裝完成,接下來就是最苦逼的寫代碼了
奮斗中……
接下來是揭曉特殊技能的時(shí)候了~~
哈哈哈,其實(shí)特殊技能就是賣萌,估計(jì)也能猜到吧~
碰到障礙的時(shí)候左右望一下然后再淡定的繼續(xù)走,那樣子真是萌翻了哈哈,有興趣的朋友可以一起交流~
-
DIY
+關(guān)注
關(guān)注
176文章
892瀏覽量
352179 -
Arduino
+關(guān)注
關(guān)注
189文章
6494瀏覽量
190304 -
智能避障小車
+關(guān)注
關(guān)注
0文章
3瀏覽量
2456
原文標(biāo)題:2018世界機(jī)器人大賽總決賽在武漢舉行
文章出處:【微信號(hào):robotmagazine,微信公眾號(hào):機(jī)器人技術(shù)與應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
避障也能預(yù)判?視覺黑科技讓掃地機(jī)器人開啟“先知”模式
AGV機(jī)器人如何實(shí)現(xiàn)毫秒級(jí)避障?深度解析多傳感器融合的核心技術(shù)

【硬核項(xiàng)目】STM32F103 智能小車全棧開發(fā):紅外循跡 / 避障算法 + WiFi 遠(yuǎn)程控制,附原理圖與代碼
肇觀電子兩款無人機(jī)視覺避障模組量產(chǎn)交付
鐳神智能激光雷達(dá)飛行汽車/eVTOL避障系統(tǒng)解決方案—開啟低空安全飛行新未來

INDEMIND:AI視覺賦能服務(wù)機(jī)器人,“零”碰撞避障技術(shù)實(shí)現(xiàn)全天候安全

Sonair推出用于機(jī)器人避障的3D超聲波傳感器
機(jī)智云開源自動(dòng)化控制篇-避障式舵機(jī)轉(zhuǎn)向系統(tǒng)

第13章-循跡功能 STM32智能小車循跡教程 PID循跡算法分析

第16章-超聲波跟隨功能 基于STM32的三路超聲波自動(dòng)跟隨小車 畢業(yè)設(shè)計(jì) 課程設(shè)計(jì)
第七章-V1.5 STM32超聲波測(cè)距STM32F103C8t6超聲波避障小車 超聲波避障模塊 STM32超聲波測(cè)距

第六章-V1.5 STM32 ADC讀取電壓 ADC采樣電壓 STM32f103c8t6adc采集電壓

中科院物理所:光學(xué)微腔構(gòu)建新一代超聲波傳感技術(shù)

智行者——視聽障礙者出行輔助AI小車設(shè)計(jì)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論