 有關Model 3 Autopilot控制器的更新
有關Model 3 Autopilot控制器的更新

去年10月份的時候,超哥的Tesla的P2.5然后分了兩篇文章寫,
從特斯拉AP2.0/2.5 運算單元看未來無人駕駛域控制器的設計趨勢1
拆解特斯拉AP2.0/2.5運算單元看未來無人駕駛域控制器的設計趨勢2
從這個基準來看,確實像這兩篇文章所說的,實際量產的產品在這個基礎上是迭代的。 AP2.5正反面一共有兩塊板,正面是一塊Parker的自動駕駛控制板,反面是基于Intel芯片加上SPC5748G MCU
Autopilot板子:這塊板子具體的還需要仔細學習一下,主要是要核對一下這個板子和NV之前的一些參考有多大的差異,基本如超哥之間分析的那樣兩顆NVIDIA “PARKER” +NVIDIA GP106-510-KC的芯片,與整車交互的是INFINEON TriCore AUTRIX TC297TX-128 MCU
尋常我們采用計算芯片,水冷的還是少,這里專門為了這個芯片做了好多的結構,用了不少的傳熱膠來保證芯片的散熱
在這個里面,一個是考慮結構固定方面,一個是布置位置。如果偏向于底盤和動力方面,怎么引入較大大面積的計算芯片對于這個芯片的保護和布置需要挺多的震動和耐久方面的考慮
在整個線束上,需要梳理一下各個攝像頭傳輸到這個主板的路徑
各個攝像頭的數據都直接拉進來進行處理,包含REAR CAM后攝像頭、SELFIE內置駕駛員攝像頭、MAIN CAM前置主攝像頭、B-PILLAR B柱兩路攝像頭和FISHEYE NARROW兩路窄幅魚眼攝像頭
REPEATER兩路轉發和GPS天線
這邊是偏向于傳統的控制器,主要是基于Tri-core的傳統交互和運行部分
藍色的是供電接口
金屬部分是Tegra的調試和連接
黑色的為MCU連接
白色為通信IO
內部很多設計,有些跟不上節奏,需要做一輪基于這類視頻處理的硬件方面的對比學習^_^
兩塊電路板之間沒有物理連接在單元內部,共用了水冷散熱部分,整合到同一個金屬外殼之中,在這個里面,設計到ECU的冷熱管理在未來也比較有趣
大部分的發熱單元都采用了導熱膠
在核心的主芯片上面還放置了一段PTC來輔助熱啟動,溫度范圍不夠寬靠溫度管理來救
小結:看到日經有關《先鋒淪落到向其他企業求援》,在汽車內部,汽車電子價值鏈的轉移非常快,核心價值有個技術導入的過程,也叫清盤洗場子
-
控制器
+關注
關注
114文章
17116瀏覽量
184444 -
特斯拉
+關注
關注
66文章
6378瀏覽量
129203 -
自動駕駛
+關注
關注
790文章
14326瀏覽量
170750
原文標題:Tesla的Autopilot控制器
文章出處:【微信號:QCDZSJ,微信公眾號:汽車電子設計】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
Model S和Model X將升級8.0版固件,增強駕駛體驗
史上最全特斯拉Model 3諜照 就這樣沒跑了
特斯拉10月17日發布MODEL 3,或搭載二代Autopilot自動輔助駕駛技術

特斯拉正式升級Autopilot自動輔助駕駛更新
馬斯克承諾將通過增強語音調整Model 3的控制和功能
有關存儲控制器的熱門技術你知道多少?
美國NTSB公布了Model 3 Autopilot致死事故調查報告 揭示相撞全過程
新款Model 3配置升級美國首發,國產尚無更新消息,引發網友關注
特斯拉軟件更新 將擴大Model 3的里程量
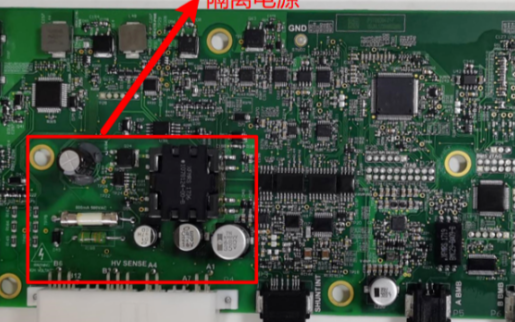
MODEL 3控制器上面的一個隔離反激電源模塊
特斯拉在Model 3到Model Y的區域控制器
model 3新款什么時候出?今日特斯拉發布新款Model 3煥新版25.99萬 新款Model3煥新版有什么更新?
使用Model Composer設計PID控制器的Versal ACAP應用說明






 工商網監
工商網監
評論