 汽車自適應巡航系統的多性能指標控制算法
汽車自適應巡航系統的多性能指標控制算法

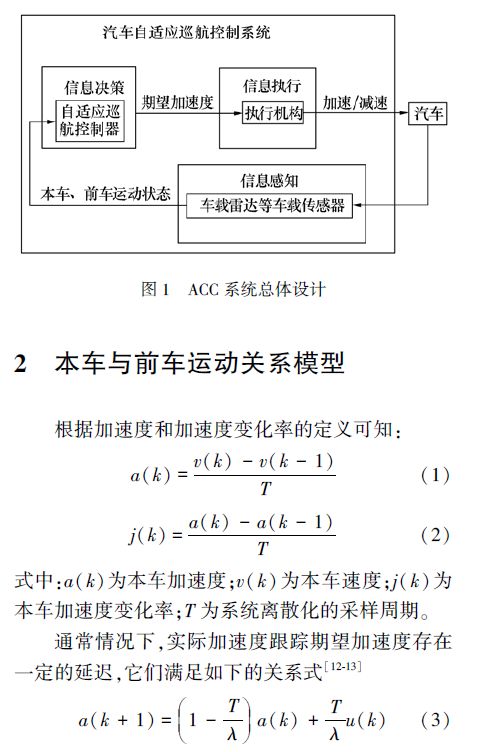
汽車自適應巡航控制(Adaptive cruise control ,ACC)系統是汽車駕駛輔助系統的重要組成部分,其作用是根據車載雷達等車載傳感器探測本車的運動狀態與其行駛車道上前方有效目標的運動狀態,并考慮到汽車自身加速和減速能力、安全性、舒適性及快速性等多方面因素,建立的以保持安全車間距為目標,以本車與行駛車道內的前方目標的相對運動狀態為輸入,以本車期望縱向加速度為輸出的系統控制器,并通過執行機構控制本車加速和減速,促使本車以期望車間距精確的跟隨前車[1]。
近年來,隨著技術的發展,人們對汽車安全性、舒適性、快速性等多個相互關聯且存在一定矛盾的性能指標提出了新的要求[2-3],怎么協調這些性能指標成為ACC系統設計的關鍵問題,研究人員相繼提出了基于PID控制[4-5]、滑模控制[7]、最優控制[8]以及模型預測控制[9-10](Model predictive control,MPC)等控制理論的ACC系統控制策略。如文獻[8]利用最優控制理論將引入前車加速度的前車跟隨誤差模型轉化為線性二次型調節器問題,并定義前車跟隨誤差模型的無限時間離散二次型目標函數以協調多個性能指標,但其解為了簡化運算忽略了前車加速度的影響,導致本車跟隨前車時誤差較大。文獻[9]在模型預測控制的框架下,將汽車自適應巡航控制算法設計轉化為帶約束的在線二次優化問題,雖然其仿真結果良好,但是其求解依賴于MATLAB優化工具箱的二次規劃求解器,并且過程比較復雜,很難將其嵌入到實車控制器中。
為此,本文在文獻中關于ACC系統的縱向動力學模型的基礎上,引入約束函數,并且在模型預測控制的框架下,以系統的輸出(間距差、相對速度、本車實際加速度)的加權平方和作為協調多性能指標的目標函數,接著將含有多個變量的目標函數轉化為含有一個未知變量的一維極值問題,并運用MATLAB的fminbnd函數對目標函數進行求解,實現了ACC系統多性能指標的協調控制。最后通過仿真,驗證了算法對協調汽車多性能指標(安全性、舒適性和快速性)的可行性。
-
算法
+關注
關注
23文章
4715瀏覽量
95714 -
函數
+關注
關注
3文章
4384瀏覽量
65113 -
ACC
+關注
關注
1文章
59瀏覽量
23177
原文標題:汽車自適應巡航系統的多性能指標控制算法
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄





 工商網監
工商網監
評論